

Мамаев А. и др. Определение передаточного
.pdfФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ «МАМИ»
Кафедра «Теория механизмов и машин»
ОДОБРЕНО методической комиссией общетехнических дисциплин
А. Н. Мамаев Т. А. Балабина А. П. Маринкин
ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ ПЛАНЕТАРНЫХ МЕХАНИЗМОВ
Под редакцией проф., к.т.н. А. Н. Мамаева
Москва 2004
СОДЕРЖАНИЕ
1.Введение ……………………………………………………………………………………3
2.Одноступенчатые и многоступенчатые зубчатые передачи с неподвижными осями вращения колес………………………………………………… 3
3.Зубчатые передачи с подвижными осями вращения колес (планетарные зубчатые механизмы) ………………………………….. 7
3.1.Структура планетарных зубчатых механизмов …………………………………………7
3.2.Определение передаточного отношения простых
планетарных механизмов ……………………………………………………………… 11 3.2.1.Аналитический метод ………………………………………………………………… 11 3.2.2.Графический метод …………………………………………………………………… 16
3.3.Определение передаточного отношения сложных планетарных механизмов ……………………………………………………………… 24
3.4.Определение передаточного отношения дифференциала с замыкающей цепью ….. 33
Литература …………………………………………………………………………………... 39
1. ВВЕДЕНИЕ
При проектировании зубчатых механизмов возникает необходимость обеспечить передачу вращения с большим передаточным отношением или при значительных межосевых расстояниях. В таких случаях применяют многозвенные зубчатые передачи.
Многозвенные зубчатые передачи подразделяются на два вида: зубчатые механизмы с неподвижными осями вращения всех колес и передачи, оси отдельных колес которых перемещаются относительно стойки – так называемые планетарные механизмы. К достоинству этих механизмов относится возможность получения больших передаточных отношений и компактность механизмов.
2.ОДНОСТУПЕНЧАТЫЕ И МНОГОСТУПЕНЧАТЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ С НЕПОДВИЖНЫМИ ГЕОМЕТРИЧЕСКИМИ ОСЯМИ ВРАЩЕНИЯ КОЛЕС
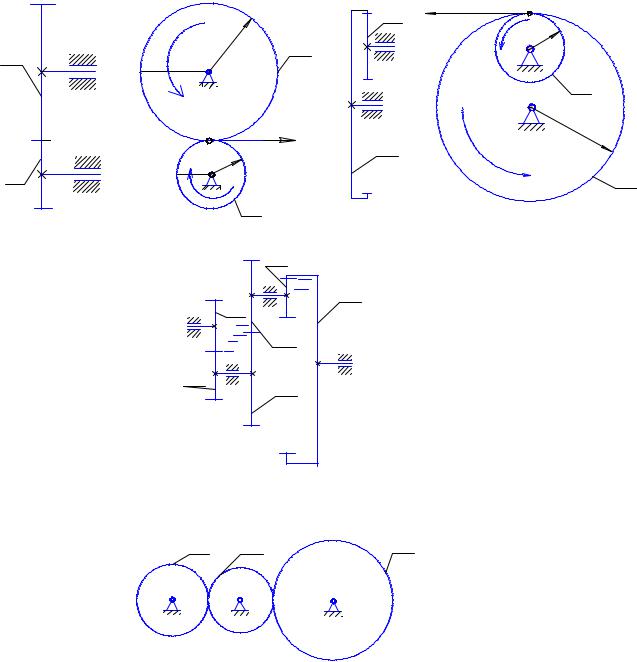
Зубчатые механизмы находят самое широкое применение в машинах и приборах. На рис. 2.1,а показан зубчатый механизм, состоящий из круглых цилиндрических зубчатых колес 1 и 2. Простейшая или одноступенчатая зубчатая передача является трехзвенным механизмом и состоит из двух колёс, находящихся в зацеплении друг с другом. Зацепление может быть внешним или внутренним, в связи с чем передачи делятся на передачи внешнего или внутреннего зацепления. На рис.2.1,а показан механизм с внешним зацеплением.
Угловые скорости колес ω1 и ω2 этого механизма имеют разные знаки, т.е. колеса вращаются в противоположных направлениях. На рис. 2.1,б показан механизм с внутренним зацеплением, угловые скорости колес ω1 и ω2 этого механизма имеют одинаковые знаки, т.е. колеса вращаются в одном направлении.
Буквами О1 и О2 обозначены оси вращения колёс, r1 и r2 - радиусы их делительных окружностей, которые в данном случае совпадают с начальными, ω1 и ω2 - угловые скорости, P12 – полюс зацепления. Если оси вращения колес передачи неподвижны в пространстве, то такую передачу называют передачей с неподвижными осями. Ведущим называется колесо, к которому приложен движущий момент. Ведомым - колесо, которое получает вращение от ведущего; к ведомому колесу приложен момент сопротивления. Передаточным отношением называется отношение угловых скоростей колес. Его обозначают U с двумя цифровыми индексами, которые указывают отношение угловых скоростей каких колёс это передаточное отношение выражает. Так, U12 = ω1 /ω2 - это передаточное отношение от первого колеса ко второму.
3
à)
2
1
|
|
á) |
1 |
u1,2 |
P1,2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
î1 |
r |
|
|
|
2 |
|
|
1 |
|
|
|
r |
|
|
w1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
o1 |
|
|
|
|
|
1 |
w1 |
|
|
|
|
î2 |
|
|
|
|
|
|
|
|
||
P1,2 |
|
u1,2 |
|
|
|
|
r |
|
2 |
|
|
|
2 |
||
w2 |
r2 |
|
|
|
w2 |
|
|
|
|
|
|
2 |
|||
|
o2 |
|
|
|
|
|
|
1
|
|
|
Ðèñ. 2.1 à,á |
|
|
|
|
5 |
|
|
|
|
3 |
6 |
|
1 |
|
|
|
|
|
|
|
|
|
1 |
2 |
4 |
|
|
|
|
||
|
|
|
|
|
2 |
|
|
3 |
|
|
|
|
|
|
|
|
|
Ðèñ. 2.2 |
|
1 |
2 |
3 |
î1 |
î |
î |
2 |
3 |
Ðèñ. 2.3
В общем случае : |
Uвщ. вм.. = ωвщ/ ωвм , |
(2.1) |
где - индекс „вщ” – обозначает ведущее колесо, индекс „вм” - ведомое колесо.
4
Согласно основной теореме зацепления линейные скорости колес в полюсе зацепления одинаковы, т.е.
V1 = V2 = ω1 r1= ω2 r2. |
(2.2) |
Отсюда |
|
U12 = ω1 /ω2 = rw2/ r w1 = r2/ r1 = Z2/Z1, |
(2.3) |
где rw1, rw2, r1 ,r2 ,Z1 ,Z2 – соответственно радиусы начальных и делительных окружностей и числа зубьёв первого и второго колёс.
При выражении передаточного отношения через радиусы или числа зубьев колёс, для учёта направления вращения колёс, передаточному отношению присваивается знак минус, если это передача внешнего зацепления (колёса вращаются в разные стороны) и знак плюс для передачи внутреннего зацепления (колёса вращаются в одном направлении). Для рис. 2.1,а:
U12 = ω1 |
/ω2 |
= - r2/ r1 = - Z2/Z1. |
(2.4) |
Для рис. 2.1,б: |
|
|
|
U12 = ω1 |
/ω2 |
= r2/ r1 = Z2/Z1. |
(2.5) |
В общем случае передаточное отношение одноступенчатой зубчатой передачи будет |
|||
иметь вид: |
|
|
|
Uвщ. вм=ωвщ/ωвм=(-1)к (rвм/rвщ)=(-1)к (zвм/zвщ), |
(2.6) |
||
где: к- число внешних зацеплений передачи. Очевидно, что для передачи внешнего зацепления к=1, а для передачи внутреннего зацепления к=0.
Таким образом, для одноступенчатой зубчатой передачи передаточное отношение от ведущего колеса к ведомому равно обратному отношению их радиусов или чисел зубьев и для внешнего зацепления отрицательно.
Очевидно, что
U 21 = |
1 |
. |
(2.7) |
|
|||
|
U12 |
|
|
Одноступенчатые зубчатые передачи, как правило, применяются при небольших передаточных отношениях (u ≤ 7). Поскольку на практике часто требуются большие передаточные отношения, то для их получения и для уменьшения габаритов механизмов, применяются многоступенчатые передачи, составленные из нескольких последовательно соединённых между собой одноступенчатых зубчатых передач, как это представлено, например, на рис.2.2.
5
При этом колёса 1 и 2 образуют первую ступень, колёса 3 и 4 – вторую ступень, колёса 5 и 6 – третью ступень.
Определим передаточное отношение каждой ступени в отдельности: UI = U12 = ω1 /ω2 = - r2/ r1,
UII = U34 = ω3 /ω4 = - r4/ r3, UIII = U56 = ω5 /ω6 = r6/ r5, где
UI, UII, UIII - передаточное отношение соответственно первой, второй, третьей ступени.
Перемножим левые и правые стороны последних выражений, учитывая при этом, что колеса 2 и 3 представляют собой блок колес, в котором два колеса жестко связаны между собой и по сути представляют собой одно звено, а поэтому их угловые скорости одинаковы
ω2 =ω3. Колеса 4 и 5 также жестко связаны между собой, т.е. представляют собой блок колес и их угловые скорости также одинаковы ω4= ω5 .
Тогда
|
UI UII UIII = U12 U34 U56 = |
ω1ω3ω5 |
= (−1)2 |
r2 r4 r6 |
= ω1 |
=Uвщ.вм . |
(2.8) |
|||||||||||||||
|
|
|
r1r3r5 |
|||||||||||||||||||
|
|
|
|
|
ω2ω4ω6 |
|
|
ω6 |
|
|
|
|||||||||||
В общем случае |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uвщ. вм.. = ωвщ/ ωвм |
= (-1)к |
произведение |
|
|
rвм |
|
|
колес |
, |
(2.9) |
|||||||||||
|
произведение r |
колес |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вщ |
|
|
|
|
|||
где к – число внешних зацеплений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Т.е. передаточное |
отношение |
многоступенчатой |
|
|
|
|
зубчатой передачи |
равно |
||||||||||||||
отношению |
произведения |
радиусов |
или |
чисел |
|
|
|
|
|
зубьев |
ведомых |
колес к |
||||||||||
произведению |
радиусов |
или |
чисел |
зубьев |
ведущих |
колес, умноженного |
на |
(-1)к , |
||||||||||||||
где к- число внешних зацеплений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рассмотрим зубчатую передачу, изображенную на рис.2.3. Передаточное отношение |
||||||||||||||||||||||
для неё определится как: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U13= ω1 /ω3 =(-1)2 |
r2 r3 |
= |
r3 |
. |
|
|
(2.10) |
||||||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
r r |
|
|
r |
|
|
|
|
||||||
|
|
|
|
|
|
|
1 |
2 |
|
1 |
|
|
|
|
|
|
|
|||||
Как видно из формулы, величина общего передаточного отношения U13 не зависит от размеров промежуточного колеса 2. Это колесо 2 является одновременно ведущим (в паре колес 2-3) и ведомым (в паре 1-2) и в связи с чем его радиус входит как в числитель, так и в знаменатель, и в конечном итоге сокращается. Оно называется паразитным и не влияет на величину передаточного отношения, а влияет только на его знак. Паразитные колеса играют
6
существенную роль в механизме, так как применяются для передачи вращения между валами, находящихся на больших расстояниях друг от друга, а также для воспроизведения передаточного отношения определенного знака.
3. ЗУБЧАТЫЕ ПЕРЕДАЧИ С ПОДВИЖНЫМИ ОСЯМИ ВРАЩЕНИЯ КОЛЁС (ПЛАНЕТАРНЫЕ ЗУБЧАТЫЕ МЕХАНИЗМЫ)
3.1. Структура планетарных зубчатых механизмов
Как уже отмечалось, планетарными зубчатыми механизмами называют механизмы, в которых имеются зубчатые колёса с подвижными осями вращения колес. Эти колеса совершают сложное движение: вращаются относительно своей оси и вместе со своей осью совершают движение относительно центральной оси механизма.
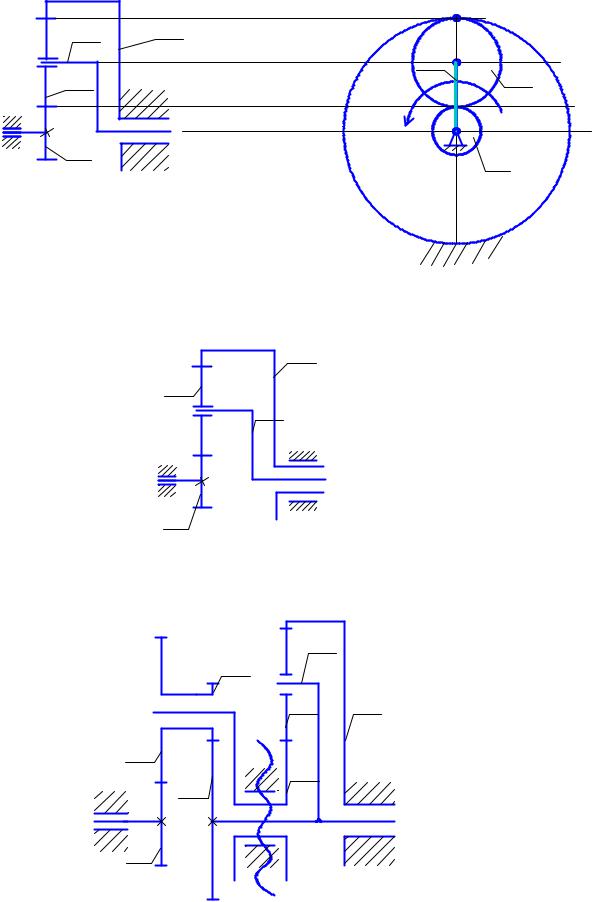
Простейший планетарный механизм, состоящий их четырех звеньев, показан на
рис. 3.1.
В этом механизме колеса 1 и 3 называются центральными. Оси этих колес в пространстве неподвижны. Колесо 2, имеющее подвижную ось, называется сателлитом, а звено «в», которое перемещает ось сателлита, называется водилом.
Центральные колеса и водило в планетарном механизме соосны, т.е. их оси совпадают и лежат на центральной оси механизма.
Планетарные механизмы подразделяются на простые планетарные, дифференциальные и сложные планетарные механизмы.
К простым планетарным механизмам относятся четырехзвенные механизмы, у которых одно из центральных колес закреплено, т.е. является неподвижным. Такие колеса называются опорными или солнечными. На рис. 3.1 показан простой планетарный механизм, у которого колесо 3 закреплено, т. е. является опорным.
Простой планетарный механизм имеет одну степень свободы, т.е. заданному углу поворота одного из его подвижных центральных звеньев соответствует строго определенный угол поворота другого звена. Так как подвижных центральных звеньев в
7
Ð2,3 |
3 |
Ð2,3 |
|
â |
|
||
Î2 |
â |
Î2 |
|
2 |
|
2 |
|
Î1 |
wâ |
Î1;Î3 |
|
Î3 |
|||
1 |
1 |
||
|
|||
|
|
||
|
Ðèñ. 3.1 |
|
3
2
â
1
Ðèñ. 3.2
|
|
3 |
â |
|
|
|
|
|
|
6 |
7 |
2 |
|
5 |
|
|
4 |
|
|
|
|
|
|
1 |
|
|
|
дифференциал |
|
простой планетарный |
|
|
|
Ðèñ. 3.3 |
механизм |
|
|
|
|
8
простом планетарном механизме всего два, то передаточное отношение в таком механизме всегда существует и имеет строго определенное значение.
Обычно у реального механизма имеется два и более симметрично расположенных сателлитов или их блоков. Они вводятся с целью уменьшения габаритов механизма, разгрузки подшипников и улучшения баллансировки механизма. При кинематическом исследовании учитывается только один сателлит или его блок, т.к. остальные на кинематику механизма не влияют.
К дифференциальным (или просто дифференциалам) относятся механизмы (рис. 3.2) у которых нет опорного колеса, т.е. оба центральных колеса в них подвижны. Дифференциал имеет две степени свободы, так как при заданном угле поворота одного из его центральных звеньев углы поворота двух других не являются определёнными. Поэтому передаточное отношение в дифференциале не имеет определенного значения. Для устранения этой неопределенности какие – либо два из трех центральных звеньев дифференциала соединяют между собой дополнительной передачей. Эта передача носит название замыкающей цепи. Дифференциал, имеющий замыкающую цепь, называется замкнутым дифференциалом или дифференциалом с замыкающей цепью.
Замыкающая цепь может быть выполнена в виде передачи с неподвижными осями вращения колес или в виде простого планетарного механизма. Также могут применятся передачи других видов.
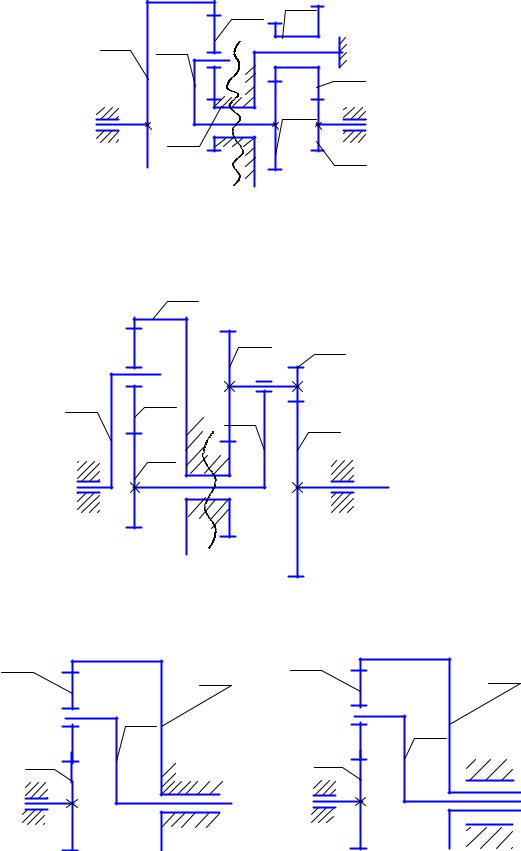
На рис. 3.3 показан дифференциал с замыкающей цепью, выполненной в виде простого планетарного механизма, где механизм, состоящий из звеньев 1, 2, 3 и 4 является дифференциалом, а механизм, состоящий из звеньев 5, 6, 7 и «в»- замыкающей цепью.
К сложным планетарным механизмам относятся механизмы, состоящие из последовательно соединенных между собой планетарного механизма и передачи с неподвижными осями вращения колес или из нескольких простых планетарных механизмов
(рис. 3.3,а, 3.3,б).
Простой планетарный механизм, имеющий неподвижное колесо, можно превратить в дифференциал, если освободить опорное колесо (см. рис.3.4 и рис.3.5) т.е. сообщить ему движение. И наоборот, любой дифференциал можно превратить в простой планетарный механизм, если закрепить одно из центральных колес. Это обстоятельство позволяет применять одинаковые методы при исследовании всех видов планетарных механизмов.
Кинематическое исследование планетарных механизмов, а именно определение скоростей вращения звеньев и их передаточного отношения, может быть произведено аналитическим, графическим и силовым методами. В данных методических указаниях
9
|
2 |
5 |
|
|
|
|
|
1 |
â |
6 |
|
|
|
|
|
|
3 |
4 |
|
|
7 |
|
|
|
|
|
|
простой планетарный |
передача с неподвижными |
|
|
механизм |
|
осями вращения колес |
|
|
Ðèñ. 3.3 à |
|
|
|
3 |
|
|
|
4 |
5 |
|
â |
2 |
|
|
|
à |
6 |
|
|
|
|
|
|
1 |
|
|
простой планетарный |
простой планетарный |
|
|
механизм |
|
||
механизм |
|
|
|
|
|
|
|
|
Ðèñ. 3.3 á |
|
|
2 |
3 |
2 |
3 |
|
|
||
|
â |
â |
|
|
|
|
|
1 |
|
1 |
|
Ðèñ. 3.4 |
Ðèñ. 3.5 |
|
|
10