

Мамаев А. и др. Определение передаточного
.pdfПередаточное отношение в приведенном механизме от пятого колеса к седьмому:
U в |
= |
ω |
в |
|
ω |
|
−ω |
в |
= |
−r |
(3.29) |
|||
ω |
5 = |
|
|
5 |
|
|
|
7 |
||||||
57 |
|
7 |
|
|
|
−ω |
в |
|
|
r |
|
|||
|
|
|
|
|
|
|
|
|
|
|
5 |
|
||
или: |
|
1 − |
ω5 |
|
= |
−r7 |
, |
|
(3.30) |
|||||
|
|
|
|
|
ω |
в |
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
ω5 |
=1 + |
r7 |
. |
|
|
(3.31) |
|||||
|
|
|
ω |
|
|
|
|
|||||||
|
|
|
в |
|
|
|
|
r |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
Для определения передаточного отношения Uав заданного механизма, перемножаем полученные передаточные отношения формулы (3.28 и 3.31), принимая при этом во внимание равенство ω1=ω5:
|
ωа |
ω5 |
= ωа = |
r1r3 |
|
|
r5 |
+ r7 |
. |
|
|
|
(3.32) |
|||
|
ω |
|
r r −r r |
|
|
|
|
|
||||||||
|
1 |
ω |
в |
ω |
в |
|
|
r |
|
|
|
|
||||
|
|
|
|
1 3 |
2 4 |
|
|
5 |
|
|
|
|
|
|||
|
|
|
|
|
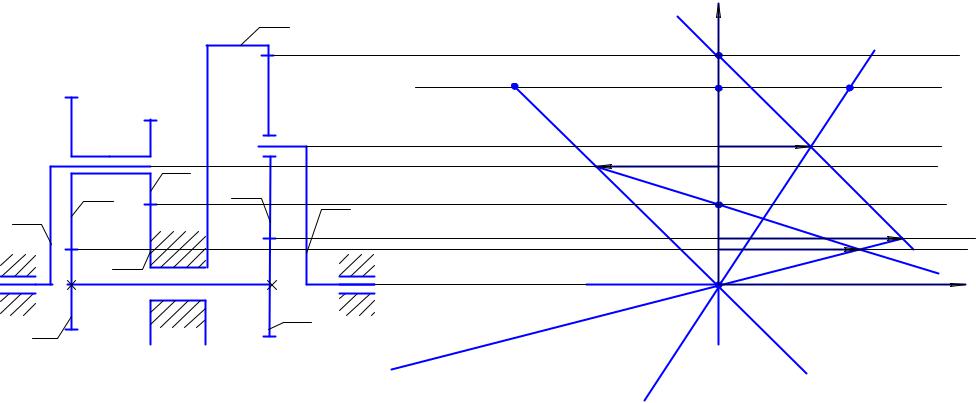
Графический способ. |
|
|
|
|
|||||||
Построение |
картины |
скоростей |
этого |
механизма |
можно |
начинать |
с любого |
|||||||||
звена. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выбираем |
прямоугольную |
систему |
координат |
XOY |
и |
задаёмся |
окружной |
|||||||||
скоростью водила |
«а», |
которая совпадает с осью блока сателлитов 2-3. Изображаем |
||||||||||||||
её направленным |
отрезком |
Vа |
|
произвольной длины |
(рис. 3.16). |
Так как |
скорость |
|||||||||
водила «а» на центральной оси равна нулю, то линию скоростей водила «а» получаем, соединяя конец отрезка Vа с началом координат. Далее строим линию распределения
скоростей |
блока |
сателлитов |
2-3. |
Скорости |
блока сателлитов |
2-3 и водила |
«а» |
в |
||||||||||||||
точке, |
лежащей |
на |
оси |
блока сателлитов одинаковы. В конце |
отрезка |
Vа |
ставим |
|||||||||||||||
второе |
обозначение |
V23. В полюсе зацепления |
Р34 |
колеса 3 |
с колесом 4 |
скорости |
||||||||||||||||
обоих |
колес одинаковы, но скорость колеса 4 |
равна |
нулю, |
так |
как |
это |
колесо |
|||||||||||||||
неподвижно. |
Поэтому и |
скорость |
колеса |
3 |
в |
полюсе |
Р34 |
также |
равна |
нулю. |
На |
|||||||||||
вертикальной |
оси |
отмечаем |
точки |
3,4. |
Проведя |
через |
конец |
отрезка |
|
Vа,V23 и |
||||||||||||
точки |
3,4 |
прямую, |
получаем |
линию |
распределения скоростей |
колеса 3, а |
значит |
и |
||||||||||||||
всего |
блока |
сателлитов |
2-3, так как |
колеса |
2 |
и 3 |
связаны |
между |
собой |
|
жестко. С |
|||||||||||
блоком сателлитов 2-3 |
сопряжено колесо 1. |
Скорости колеса 1 |
и колеса 2 |
в полюсе |
||||||||||||||||||
Р21 их зацепления одинаковы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
31
7
Ð6,7
n B
|
|
3 |
|
|
uà;u2,3 |
2 |
3,4 |
6 |
|
â |
|
à |
Ð |
|
|
|
|
4 |
Ð5,6 |
|
|
|
|
Ð2,1 |
|
|
|
||
|
|
|
|
|
|
1 |
|
|
5 |
|
,1 |
|
|
|
|
||
|
|
|
.5 |
||
|
|
|
ë.ð.ñ |
|
|
Ðèñ.3.16
ë |
y |
ð |
|
. |
|
. |
|
. |
|
ñ |
|
. |
|
6 |
|
6,7
A |
C |
n |
u6;uâ
3,4
|
|
|
|
|
|
|
|
u6;u5 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
u1;u2 |
ð. |
2,3 |
|||
|
|
|
|
|
O |
|
|
ñ. |
|||
|
|
|
|
|
|
|
|
x |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
,6 |
ð |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
||
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
" |
ñ |
|
|
|
|
|
||
|
|
|
" |
|
|
|
|
|
|||
|
|
â |
|
|
|
|
|
|
|||
|
|
|
" |
|
|
|
|
|
|||
|
" |
|
|
à |
|
|
|
|
|
||
. |
|
|
|
|
|
|
|
|
|
|
|
.ñ |
|
|
|
|
|
|
|
|
|
|
|
.ð |
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
Скорость |
колеса |
2 |
в |
полюсе |
Р21 |
определяется |
отрезком V2, |
проведенным |
||
горизонтально на |
уровне |
полюса |
Р21 от |
вертикальной |
оси |
OY до |
пересечения с |
|||
линией |
распределения |
скоростей |
колеса |
2. |
Этот же отрезок |
изображает и скорость |
||||
колеса 1 |
в полюсе |
Р21. |
Проставляем второе |
обозначение |
V1 |
в конце |
отрезка V2 . |
|||
На центральной |
оси скорость колеса 1 равна нулю. Соединив |
конец |
отрезка |
V2,V1 с |
|||||||||||||||
началом |
координат, |
получаем |
линию распределения |
скоростей |
колеса 1. |
|
|
||||||||||||
Так |
как |
с колесом 1 жестко связано колесо |
5, |
то |
полученная |
линия |
|||||||||||||
распределения |
скоростей |
будет одновременно |
и линией скоростей колеса 5. Далее |
||||||||||||||||
строим |
линию |
скоростей |
сателлита |
6, так |
как |
он является |
звеном, |
сопряженным с |
|||||||||||
колесом |
5. Скорость |
сателлита |
6 в |
полюсе |
Р67 |
его |
зацепления |
с колесом |
7 |
равна |
|||||||||
нулю, так |
как |
колесо 7 неподвижно. На вертикальной оси |
на |
уровне полюса Р67 |
|||||||||||||||
отмечаем |
точки |
6,7. |
В полюсе |
Р56 |
|
зацепления |
сателлита |
6 |
с колесом |
5 |
скорость |
||||||||
сателлита 6 равна скорости колеса |
5. |
Скорость |
колеса 5 в полюсе Р56 |
изображается |
|||||||||||||||
отрезком |
V5, |
проведенном |
горизонтально |
на |
уровне полюса |
Р56, |
ограниченном |
||||||||||||
вертикальной осью OY и линией распределения скоростей колеса 5. Этим же отрезком |
|||||||||||||||||||
изображается и |
скорость колеса 6 в полюсе Р56. В |
конце |
отрезка V5 |
ставим |
второе |
||||||||||||||
обозначение v6. |
Для |
получения линии распределения скоростей сателлита 6 |
проводим |
||||||||||||||||
прямую |
через конец |
отрезка |
V6 |
и |
точку 6,7 на |
оси |
OY. Далее переходим к |
|
водилу |
||||||||||
«в». Скорость этого звена на центральной оси механизма равна нулю. В точке на оси сателлита 6 скорость водила равна скорости оси этого сателлита. На уровне оси сателлита 6 проводим горизонталь до пересечения с линией распределения скоростей сателлита 6. Отрезок, заключенный между этой линией распределения скоростей и осью OY, будет представлять собой скорость оси сателлита 6, а заодно и скорость водила «в» в этой точке. Проставляем обозначение V6 в конце отрезка V6. Для нахождения линии распределения скоростей водила соединяем конец вектора V6 с началом координат.
В произвольном месте картины скоростей проводим горизонталь п-п, обозначаем точки её пересечения с соответствующими линиями распределения скоростей, а также с вертикальной осью и находим передаточное отношение:
Uав = ωа = − АВ .
ωв АС
3.4.Определение передаточного отношения дифференциала
сзамыкающей цепью
Для |
определения |
передаточного отношения |
дифференциала с замыкающей |
цепью его |
мысленно разбивают на составляющие |
механизмы: дифференциал и |
|
замыкающую цепь. Дифференциал преобразуют |
в |
приведенный |
механизм, |
применяя |
|||||||||||||||||||||||||
метод остановки водила, и составляют |
уравнение, |
связывающее |
угловые |
скорости |
|||||||||||||||||||||||||
трех центральных |
звеньев |
дифференциала. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Далее составляют уравнение, устанавливающее |
|
связь между угловыми скоростями |
|||||||||||||||||||||||||||
центральных |
звеньев |
|
замыкающей |
цепи. |
При |
|
этом, |
если |
|
замыкающая |
цепь |
||||||||||||||||||
представляет |
собой |
зубчатую |
|
передачу |
с |
неподвижными |
осями |
вращения |
колес, |
то |
|||||||||||||||||||
уравнение |
получают |
непосредственной |
подстановкой |
|
действительных |
угловых |
|||||||||||||||||||||||
скоростей |
звеньев, |
выраженных |
через радиусы или |
числа зубьев |
колес. |
|
|
|
|
||||||||||||||||||||
|
Если |
же замыкающая |
|
|
цепь выполнена |
|
в |
|
виде |
простого |
планетарного |
||||||||||||||||||
механизма, |
|
то |
для |
получения |
уравнения, |
|
связывающего |
угловые |
скорости звеньев, |
||||||||||||||||||||
простой планетарный механизм |
преобразуют |
с помощью метода остановки водила |
в |
||||||||||||||||||||||||||
приведенный, и уже для этого механизма |
находят |
|
передаточное |
|
отношение |
между |
|||||||||||||||||||||||
центральными звеньями, которое затем выражают |
|
через |
радиусы |
или |
числа |
зубьев |
|||||||||||||||||||||||
колес. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Искомое |
передаточное |
|
отношение |
|
заданного |
|
механизма |
определяют |
из |
|||||||||||||||||||
совместного |
решения двух |
полученных |
|
уравнений - |
для |
дифференциала |
|
и для |
|||||||||||||||||||||
замыкающей цепи. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Пример № 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Для |
|
дифференциала |
с |
замыкающей |
цепью, |
кинематическая |
схема |
которого |
||||||||||||||||||||
представлена на рис. 3.17, определить передаточное |
|
отношение от |
первого |
колеса |
к |
||||||||||||||||||||||||
водилу U1в. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Рассмотрим |
схему |
предложенного |
механизма |
и |
выясним его |
структуру. Как |
||||||||||||||||||||||
видно из рисунка 3.17, механизма имеет два водила «а» и «в», |
и |
следовательно, |
|||||||||||||||||||||||||||
имеют |
|
место |
два |
планетарных |
механизма. |
На |
|
водиле |
«а» |
|
установлен |
блок |
|||||||||||||||||
сателлитов 2-3, который обкатывается по |
центральным |
|
колесам |
1 |
и |
4. Поскольку |
|||||||||||||||||||||||
оба центральных |
колеса, |
как |
колесо 1, |
так |
и |
колесо |
4, |
могут |
вращаться, |
то |
левая |
||||||||||||||||||
часть |
механизма, |
состоящая |
из |
водила «а», |
блока |
сателлитов |
2-3 |
и |
центральных |
||||||||||||||||||||
колес |
1 |
и |
4, |
является |
дифференциалом. |
Водило |
«а» |
этого |
механизма и |
колесо |
4 |
||||||||||||||||||
соединены между собой зубчатой |
передачей, |
изображенной справа от дифференциала. |
|||||||||||||||||||||||||||
Таким |
образом, |
заданный |
механизм представляет собой |
дифференциал с |
замыкающей |
||||||||||||||||||||||||
цепью. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим |
теперь |
|
замыкающую |
|
цепь. |
Она |
|
содержит |
|
водило «в», на |
|||||||||||||||||
котором |
установлен |
сателлит |
|
6. |
Колесо |
5 |
и 7 |
является |
центральным, |
а поскольку |
|||||||||||||||||||
колесо 7 неподвижно, то замыкающая цепь, состоящая из водила «в»,сателлита 6 и центральных колес 5 и 7, представляет собой простой планетарный механизм.
34
|
В |
целом |
заданный |
механизм |
является |
дифференциалом |
с |
замыкающей |
|||||||
цепью, |
выполненной в виде |
простого планетарного |
механизма. |
|
|
|
|
||||||||
|
|
|
Аналитический метод |
|
|
|
|
|
|
|
|||||
|
Рассмотрим отдельно дифференциал и, |
|
применяя метод обращения движения- |
||||||||||||
остановки |
водила, |
преобразуем его |
в |
передачу |
с |
неподвижными |
осями |
вращения |
|||||||
колес. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Составим |
таблицу угловых |
скоростей |
центральных звеньев |
как |
в |
заданном, |
||||||||
так и в преобразованном механизме: |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
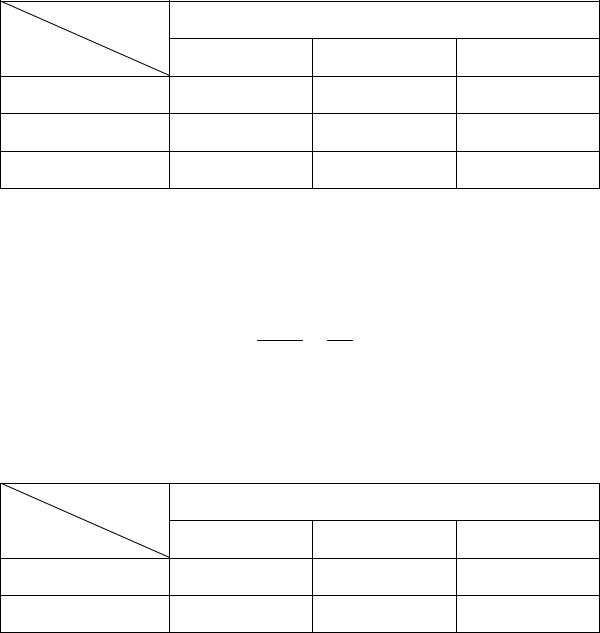
Таблица № 5 |
|
|||
Звенья |
|
|
|
|
|
Центральные |
звенья |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Тип движения |
|
|
1 |
|
|
|
|
4 |
|
|
«а» |
|
|
||
Действительное |
|
ω1 |
|
|
|
ω4 |
|
|
ωа |
|
|
||||
Дополнительное |
|
–ωа |
|
|
–ωа |
|
–ωа |
|
|
||||||
Суммарное |
|
|
ω1–ωа |
|
|
ω4–ωа |
|
|
0 |
|
|
||||
Для приведенного механизма найдем |
отношение |
|
угловых скоростей |
центральных |
|||||||||||
звеньев, |
которое выразим |
через радиусы колес: |
|
|
|
|
|
|
|
||||||
|
|
|
U14a = ω1aa |
= ωω1 −−ωωa |
= rr2rr4 . |
|
|
|
|
|
|
( 3.33) |
|||
|
|
|
|
ω4 |
|
4 |
a |
1 3 |
|
|
|
|
|
|
|
Далее |
рассматриваем |
замыкающую |
цепь, |
|
выполненную |
в |
виде |
простого |
|||||||
планетарного механизма. |
Так |
же |
применяем метод |
остановки |
водила, |
и |
составляем |
||||||||
таблицу: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица № 6 |
|||
Звенья |
|
|
|
|
|
Центральные звенья |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Тип движения |
|
|
5 |
|
|
|
|
7 |
|
«в» |
|
|
|||
Действительное |
|
ω5 |
|
|
ω7=0 |
|
ωв |
|
|
||||||
Дополнительное |
|
–ωв |
|
|
|
–ωв |
|
–ωв |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
35 |

Суммарное |
|
|
|
|
ω5–ωв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–ωв |
|
|
|
|
|
0 |
|
|
|||||||||||||
Для приведенного механизма находим отношение угловых скоростей центральных |
||||||||||||||||||||||||||||||||||||||||||||||||
звеньев, |
которое выражаем через радиусы колес: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
U в |
= |
|
ω5в |
= |
|
|
|
ω5 −ωв |
|
|
= − |
r7 |
|
|
|
|
|
|
|
|
|
( 3.34) |
|||||||||||||||||||||||
|
|
|
|
в |
|
|
−ωв |
|
|
|
|
r5 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
откуда |
|
|
57 |
|
|
|
ω7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1− |
ω5 |
|
= − |
r7 |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
(3.35) |
||||||||||||||||||||||
|
|
|
|
|
ω |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
ωω5 |
|
=1 + |
|
|
r7 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.36) |
|||||||||||||||||||
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Учитывая, что ω4=ωв |
и ωа=ω5 |
|
|
|
перепишем уравнение (3.33) в следующем виде: |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
ωω1 −−ωω5 |
= |
|
r2 r4 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.37) |
|||||||||||||||||||||||
|
|
|
|
|
|
r r |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
в |
|
|
|
5 |
|
|
|
|
|
|
|
1 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Разделим почленно левую часть выражения (3.37) |
на „ωв” |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
ωω1 |
− |
ωω5 |
|
= |
|
r r |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
в |
|
|
|
2 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
ωв |
− |
ω5 |
|
|
r1r3 |
|
|
|
|
|
|
|
|
|
|
|
(3.38) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
ωв |
|
|
|
ωв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
и преобразуем полученное выражение |
с учетом |
уравнения |
(3.36): |
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ωω1 |
−( |
r5 +r7 |
) |
|
|
|
|
|
|
|
r r |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
2 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
1−( |
r5 +r7 |
) |
|
|
|
= |
|
. |
|
|
|
|
|
|
|
|
(3.39) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r1r3 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В результате |
|
|
|
|
|
|
|
|
|
|
|
|
− ( |
|
|
|
|
|
|
|
)( |
|
|
|
|
|
|
|
)+ ( |
|
|
). |
|
|
|
|
|
|
||||||||||
|
|
|
|
ω 1 |
|
= |
r2 r4 |
|
r2 r4 |
r5 +r7 |
r5 +r7 |
|
|
|
|
(3.40) |
||||||||||||||||||||||||||||||||
|
|
|
|
ω |
|
r r |
|
r r |
r |
r |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
в |
1 |
3 |
|
|
|
|
|
1 |
|
3 |
|
|
|
|
|
5 |
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
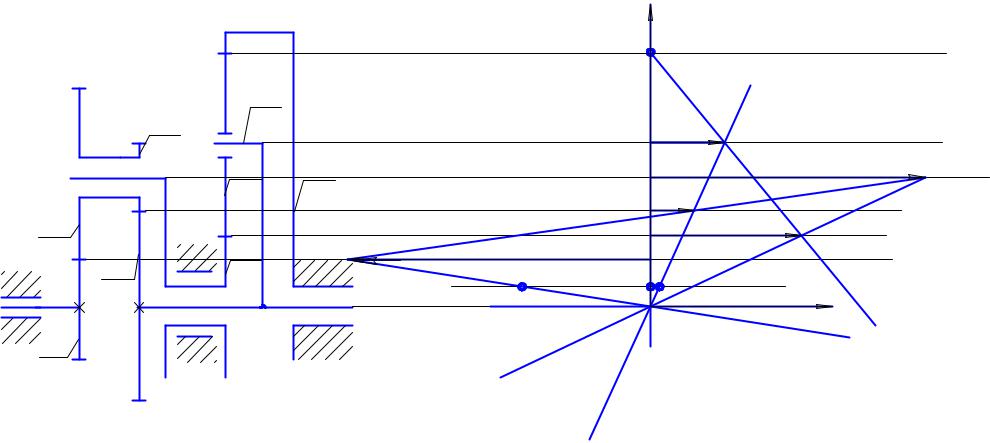
Графический |
|
|
метод |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
Выбираем прямоугольную |
|
систему |
|
|
координат |
XOY, с |
началом координат на |
|||||||||||||||||||||||||||||||||||||||||
центральной оси механизма. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Построение |
картины скоростей |
|
|
в |
замкнутом |
дифференциале нельзя начинать |
|||||||||||||||||||||||||||||||||||||||||
с его свободного |
звена, |
т.е. с |
|
колеса |
|
|
1. Во избежание ошибок можно рекомендовать |
|||||||||||||||||||||||||||||||||||||||||
начинать |
построение с замыкающей цепи. |
Поэтому |
зададимся |
окружной |
скоростью |
|||||||||||||||||||||||||||||||||||||||||||
точки водила «а», лежащей на оси блока |
|
|
сателлитов 2-3. |
|
Эту |
скорость |
изображаем |
|||||||||||||||||||||||||||||||||||||||||
отрезком |
Vа. Так как |
скорость |
точки |
водила «а» на |
центральной |
оси равна нулю, то |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
36 |
|
соединив |
конец |
отрезка |
Vа с |
началом |
координат, |
|
получаем |
линию распределения |
|||||||||||||
скоростей водила «а». Эта |
линия будет |
и линией распределения |
скоростей |
колеса |
5, |
||||||||||||||||
т.к. водило «а» и колесо 5 |
соединены между собой жестко, |
|
|
|
|
|
|
|
|||||||||||||
т. е. представляют собой одно звено и вращаются с одной угловой скоростью. |
|
|
|||||||||||||||||||
|
Далее переходим к построению линии распределения скоростей |
|
колеса |
6, |
|||||||||||||||||
которое сопряжено с колесом 5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
На этом сателлите можно найти скорости двух его точек и, следовательно, |
||||||||||||||||||||
построить его линию скоростей. |
Скорость сателлита |
6 |
в полюсе |
Р67 |
его зацепления |
с |
|||||||||||||||
колесом 7 равна скорости колеса 7, а в полюсе Р65 зацепления с |
колесом |
5 равна |
|||||||||||||||||||
скорости колеса 5. Скорость колеса 7, в полюсе Р67 равна нулю, |
так как |
колесо |
7 |
||||||||||||||||||
неподвижно. Следовательно, нулю равна в этом полюсе и скорость |
сателлита |
6. На |
|||||||||||||||||||
вертикальной оси OY |
отмечаем |
точку 6,7. Скорость |
|
колеса |
5 |
в полюсе |
Р65 |
можно |
|||||||||||||
определить, так как линия скоростей |
колеса 5 |
и водила «а» уже построена. Для этого |
|||||||||||||||||||
необходимо провести горизонталь на уровне полюса Р65. Тогда отрезок V5, |
|||||||||||||||||||||
заключенный между |
|
вертикальной |
осью |
OY |
и линией скоростей |
колеса |
5, будет |
||||||||||||||
изображать скорость колеса 5, в полюсе Р65. Этот же отрезок будет |
изображать |
||||||||||||||||||||
скорость |
сателлита |
6 |
V6 в |
полюсе |
Р65. Соединяя точку на оси |
6,7 |
с концом |
отрезка |
|||||||||||||
V5,V6, получаем линию скоростей сателлита 6. |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
С сателлитом 6 сопряжено водило «в». Поэтому переходим к построению |
||||||||||||||||||||
линии |
распределения |
скоростей |
водила |
«в». Скорость |
водила |
«в» в точке, |
лежащей |
||||||||||||||
на оси |
сателлита 6, |
равна |
скорости |
оси этого сателлита. Для |
определения |
скорости |
|||||||||||||||
оси сателлита 6 проводим горизонталь на уровне оси |
сателлита 6 |
до пересечения |
с |
||||||||||||||||||
линией его скоростей. Полученный |
отрезок V6, изображает скорость |
оси |
сателлита |
6, |
|||||||||||||||||
а вместе с тем |
и скорость |
водила |
Vв точки водила «в» на оси сателлита |
6. Скорость |
|||||||||||||||||
точки водила «в», лежащей на центральной оси равна нулю. |
|
|
|
|
|
|
|
||||||||||||||
Соединяя конец отрезка V6,Vв с началом координат, получаем |
линию |
скоростей |
|||||||||||||||||||
водила |
«в». Эта линия |
является |
одновременно и |
линией распределения |
скоростей |
||||||||||||||||
колеса |
4, |
поскольку |
водило |
«в» |
и |
колесо 4 |
жестко |
связаны |
между |
собой. |
Колесо |
4 |
|||||||||
сопряжено с колесом 3 блока сателлитов 2-3. Скорости этих колес в полюсе Р43 их
зацепления одинаковы. Скорость колеса |
4 в полюсе Р43 изображается отрезком V4, |
|||
который |
получаем, проведя |
на уровне |
полюса Р43 горизонталь до пересечения |
с |
линией распределения скоростей |
колеса 4. |
Этот же отрезок изображает и скорость |
V3 |
|
колеса 3 |
в полюсе Р43. |
|
|
|
37
Ð67
|
3 |
|
â |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
7 |
|
|
|
|
|
|
|
2 |
Ð43 |
|
|
|
|
|
|
|
|
|
Ð65 |
5 |
u2;u1 |
|
|
|
|
|
|
|
|
Ð21 |
|
|
|
|
|
|
|
|||
4 |
|
n |
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
" |
1 |
|
|
|
|
|
|
|
|
à |
|
|
|
|
|
|
|
|
" |
|
||
|
|
|
|
|
|
, |
|
|
||
|
|
|
|
|
.ñ.5 |
|
|
|
||
|
|
|
|
|
ð |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
Ðèñ. 3.17
y(r)
6,7
uâ;u6
u4;u3
B C
|
|
|
|
|
." |
â |
" |
; |
4 |
|
|
|
|
|
|
|
|||
|
|
|
. |
ñ |
|
|
|
||
|
|
ð |
|
|
|
|
|||
ë |
. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
uà;u2;u3
u6;u5
|
ë |
|
. |
n |
ð |
ñ |
|
|
. |
|
. |
|
6 |
|
x(u) |
|
ë. |
|
ð. |
|
ñ |
|
.1 |

Итак, нам известна скорость точки водила «а», совпадающей с осью блока сателлитов 2-3. Этой скоростью мы задавались. И известна скорость колеса 3 в
полюсе зацепления Р43. |
Соединяя концы отрезков V3,V4 и |
Vа,V2,V3, |
получаем линию |
||||||||||
скоростей распределения колеса 3, а заодно и колеса 2, так как это блок колес. |
|
|
|||||||||||
Теперь переходим к построению линии распределения скоростей колеса 1. В |
|||||||||||||
полюсе Р21 |
зацепления |
колес 2 и 1 их скорости V2 и V1 одинаковы. Скорость колеса |
|||||||||||
2 в полюсе Р21 можно |
определить по линии распределения скоростей сателлита 2-3. |
||||||||||||
Эта скорость изображается направленным отрезком |
V2,проведенном на |
уровне |
полюса |
||||||||||
Р21. Этим же отрезком |
будет |
изображаться |
и |
скорость |
колеса |
1 |
в полюсе |
Р21. |
|||||
Скорость точки |
колеса |
1, лежащей на центральной оси механизма, |
равна |
нулю. |
|||||||||
Соединив конец отрезка V2,V1 с началом координат, получаем линию распределения |
|||||||||||||
скоростей первого колеса. |
|
|
|
|
|
|
|
|
|
|
|||
Проводим горизонталь |
п-п в произвольном месте |
и обозначаем |
точки |
её |
|||||||||
пересечения |
с |
вертикальной |
осью OY |
и |
линиями скоростей |
колес |
1 |
и |
4 |
||||
соответственно |
буквами В, А и С. В итоге |
искомое передаточное |
отношение будет |
||||||||||
равно: |
|
|
|
|
|
|
|
|
|
|
|
|
|
= − BA
U14 BC .
ЛИТЕРАТУРА
1. Артоболевский И.И. «Теория механизмов и машин», М, 1988г. 639 с.
2. Левитский Н.И. «Теория механизмов и машин», М. 1990г. 590 с.
3. Фролов К.В. «Теория механизмов и машин», М. 1987г. 495 с.
4.Зоммер Э.Ф. «Расчет передаточного отношения планетарного механизма»,
МАМИ, 1990г.

Мамаев Алексей Николаевич Балабина Татьяна Александровна Маринкин Анатолий Петрович
«Определение передаточного отношения планетарных механизмов».
Подписано в печать |
Заказ |
Тираж 300 |
Усл.п.л. 2,47 |
Уч. – изд. л. 2,6 |
|
Бумага типографская |
Формат 60 х 90/16 |
|
Москва 105839, Б.Семеновская ул., 38, МАМИ