

#тои zanyatie_18
.pdfТЕОРЕТИЧЕСКИЕ ОСНОВЫ ИНФОРМАТИКИ
Практическое занятие №18
к.т.н, доцент Ямпольский Сергей Михайлович
Вопросы к экзамену по дисциплине «Теоретические основы информатики»
1.Методы анализа достижимости сети Петри
2.Способы построения конечных автоматов
3.Преобразование конечных автоматов
4.Минимизация состояний конечного автомата
5.Теоретико-множественные операции реляционной алгебры
6.Специальные операции реляционной алгебры
24 мая 2014 г. – консультация
31 мая 2014 г. – экзамен
7 июня 2014 г. – показ работ

● Эквивалентность автоматов Мили и Мура
Автоматы Мили и Мура называются эквивалентными если они имеют одинаковые входные и выходные сигналы и их реакция на любую входную последовательность сигналов совпадает
Для любого автомата Мили существует эквивалентный ему автомат Мура и для любого автомата Мура существует эквивалентный ему автомат Мили
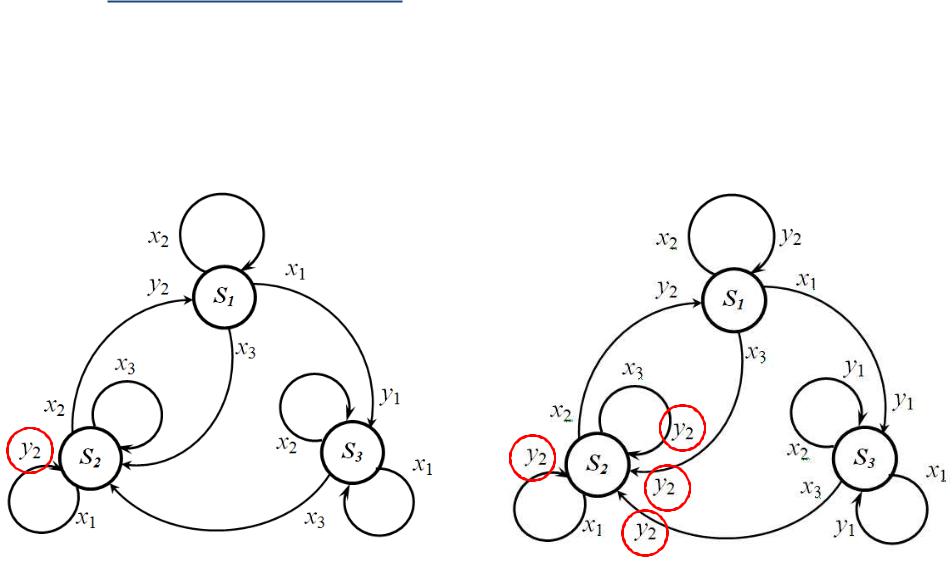
● Преобразование автомата Мура в эквивалентный автомат Мили
При графическом способе преобразования, функция переходов автомата Мили совпадает с функцией переходов исходного автомата Мура, а выходной сигнал yz, записанный рядом с вершиной Sk, переносится на все дуги, входящие в эту вершину
Исходный автомат Мура |
Эквивалентный автомат Мили |
|
|
|
|
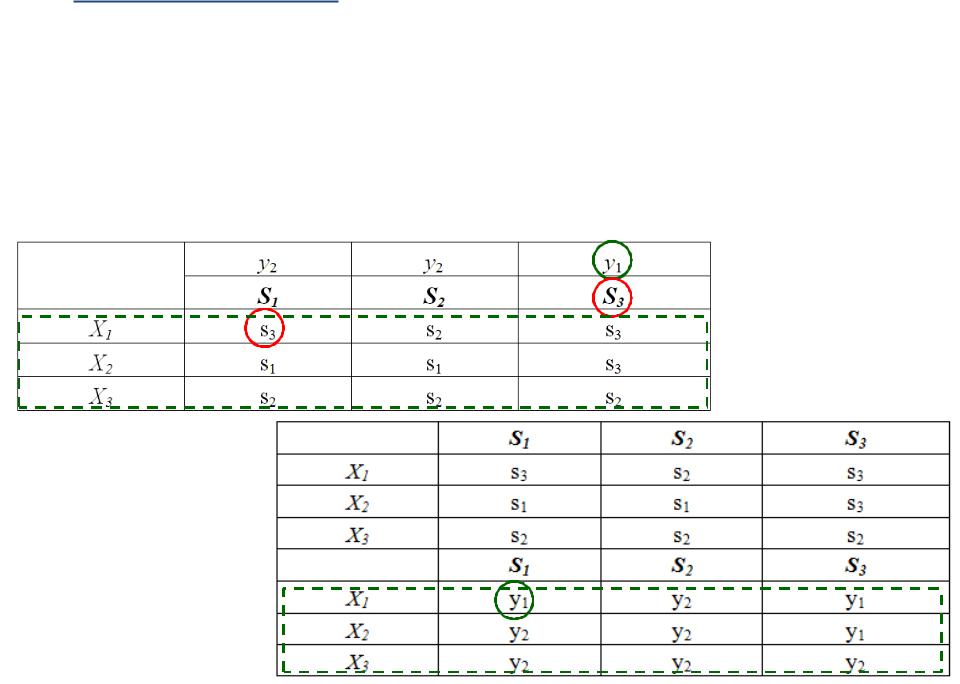
При табличном способе преобразования:
●функция переходов автомата Мили совпадает с функцией переходов исходного автомата Мура
●функция выходов автомата Мили получается из функции переходов автомата Мура путем замены символа Sk, стоящего на
пересечении строки Xj и столбца Si, символом выходного сигнала yz отмечающего столбец Sk в таблице автомата Мура
Исходный
автомат Мура
Эквивалентный
автомат Мили

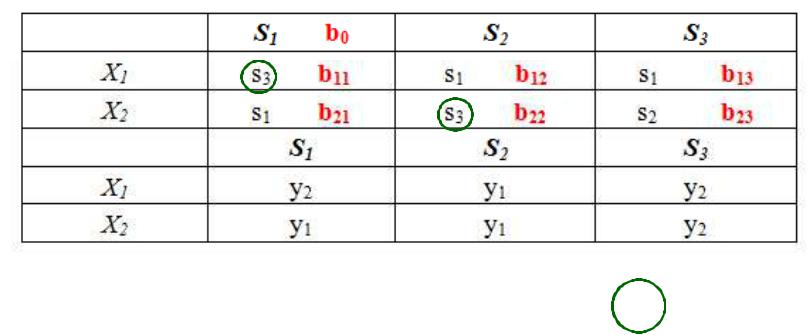
Для преобразования автомата Мили в эквивалентный ему автомат Мура необходимо:
1. Поставить в соответствие аргументам функции переходов ϕ(si, xj) исходного автомата Мили, состояние bji автомата Мура
Исходный автомат Мили
ϕ(si, xj) → bji
Состояние b0 автомата Мура соответствует начальному
состоянию исходного автомата Мили
Для преобразования автомата Мили в эквивалентный ему автомат Мура необходимо:
2.Составить функцию переходов автомата Мура:
∙выписать состояния исходного автомата Мили и соответствующие множества состояний автомата Мура
S1 = {b0, b12, b13, b21} |
S2 = {b23} |
S3 = {b11, b22} |
|
|
|
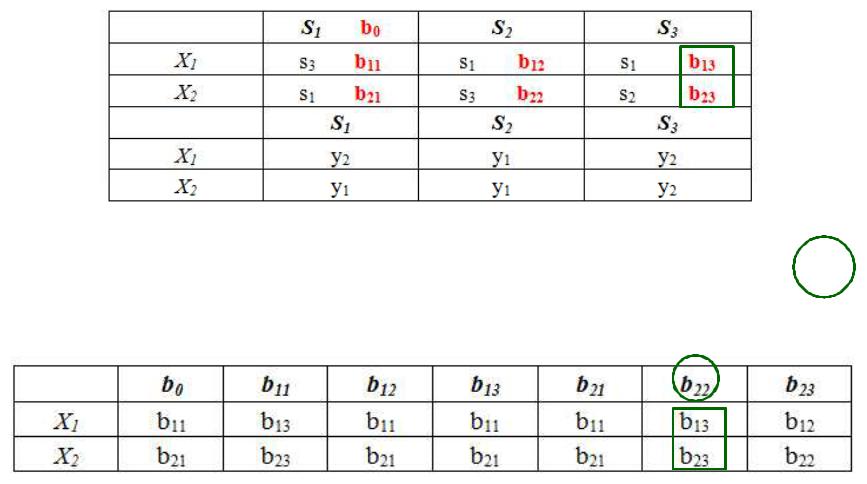
∙ в столбец таблицы переходов автомата Мура для состояния bji записать столбец из таблицы переходов исходного автомата Мили, соответствующий состоянию Si
Исходный автомат Мили
S1 = {b0, b12, b13, b21} |
S2 = {b23} |
S3 = {b11, b22} |
Эквивалентный автомат Мура |
|
|
|
|
|

∙ для определения функции выходов, каждому состоянию автомата Мура bji, ставится в соответствие выходной сигнал, соответствующий аргументам (si, xj) исходного автомата Мили
Для начального состояния b0 значение выходного сигнала выбирается произвольно (из числа выходных сигналов начального состояния автомата Мили)
Исходный автомат Мили
Эквивалентный автомат Мура

● Минимизация состояний автомата
Минимальный конечный автомат – это автомат
эквивалентный исходному и имеющий наименьшее количество состояний
Эквивалентный автомат Мура