Описание объекта исследования, приборов и оборудования
Для проведения лабораторной работы используются реальные объекты: детали машин и сборочные единицы (болты, гайки, шпон- ки, узлы).
Методика проведения эксперимента и обработка результатов
Студенты, под руководством и при непосредственном участии преподавателя, знакомятся с деталями машин общего назначения согласно классификации, используя при этом натурные образцы, макеты, лабораторные установки и плакаты. Преподаватель выдает студенту какую-либо деталь (узел) для эскизирования, при необхо- димости – мерительный инструмент.
Содержание отчета
Титульный лист.
Цель работы.
Описание, составленное по данному методическому руковод- ству, в котором надо представить названия, характеристики, назна- чение, рисунки деталей.
Эскиз детали или сборочной единицы (по усмотрению препо- давателя), выполненный на листе формата А4 (А3) в соответствии с требованиями ЕСКД.
Контрольные вопросы
В чем отличие детали от сборочной единицы?
Какие типы соединений используют в машиностроении?
Какие соединения относят к разъемным (неразъемным)?
Какие детали используются в резьбовых соединениях и каково их назначение?
Каковы достоинства резьбовых соединений?
Какие виды шпонок Вы знаете?
Каковы достоинства и недостатки шпоночных соединений?
Какой профиль могут иметь зубья шлицевого соединения?
Почему некоторые виды соединений называют неразъемными?
Какими достоинствами обладают заклепочные соединения?
Каковы преимущества и недостатки сварных соединений?
Каковы основные виды сварных соединений?
Лабораторная работа № 2
Исследование рычажных механизмов
Цель работы: изучение принципов действия и видов рычажныхмеханизмов; определение основных параметров рычажных механиз- мов; выполнение кинематической схемы рычажного механизма.
Оборудование и принадлежности
Рычажный механизм.
Набор ключей.
Линейка измерительная.
Штангенциркуль.
Теоретические положения
Классификация рычажных механизмов.
Общие требования
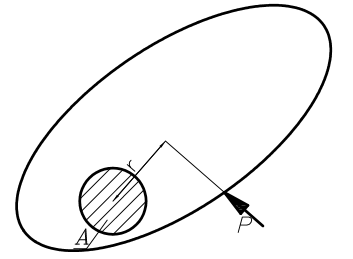
Под термином «рычаг» обычно понимают деталь конструкции, которая под действием силыP поворачивается или вращается отно- сительно неподвижной опоры. Возникающий при этом крутящий момент M = Pr, где r – плечо рычага, т. е. расстояние от центра (оси)А вращения до линии действия силыP (рисунок 2.1).
|
|
|
Рисунок 2.1 – К пояснению термина «рычаг» |
Рычаг, имеющий возможность поворачиваться не менее чем на один полный оборот, называется кривошипом; рычаг с ограниченным углом поворота (менее 360°) обычно называетсякоромыслом. Припомощи рычагов и кривошипов можно передавать вращательное дви- жение с одного вала на другой, а также преобразовывать вращатель- ное движение в прямолинейное и наоборот. Все передачи такого рода можно объединить в группу рычажных передач или, как их часто называют, рычажных механизмов.
В отличие от общего машиностроения, где ведущее звено (кри- вошип или кулачок) обычно совершает полное круговое движение, в приборах используются главным образом рычажные механизмы с ограниченным углом поворота ведущего звена, т. е. ведущее звено совершает качательное движение.
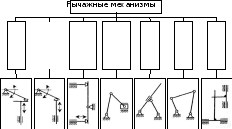
Классификация рычажных механизмов по виду преобразования представлена на рисунке 2.2.
При проектировании рычажных передаточных механизмов необ- ходимо среди многообразия известных схем по возможности выбрать простую, наиболее отвечающую поставленной задаче и провести ее силовой и кинематический расчет.
Следует отметить, что в приборах в основном применяются си- нусные, тангенсные, сдвоенные тангенсные и поводковые рычаж- ные механизмы, так как основной задачей этих механизмов являет- ся точность, а не передача крутящего момента.
Рисунок 2.2 – Классификация рычажных механизмов
Тангенсные
Синусные
Двойные тангенсные
Кривошипно- ползунные
Кулисные
Шарнирные
Поводковые