

Министерство сельского хозяйства РФ
Федеральное государственное БЮДЖЕТНОЕ образовательное учреждение
Высшего профессионального образования
«ижевская государственная сельскохозяйственная академия»
Кафедра теоретической механики и сопротивления материалов
Кинематическое и динамическое исследование механизмов привода
Пояснительная записка к индивидуальной работе по ТММ
ТММ 3.5.5 ПЗ
Выполнил: Виноградов А.П.
студент 332 гр.
Руководил: Иванов А.Г.
доцент, к.т.н.
Ижевск 2015
ОГЛАВЛЕНИЕ
Исходные данные…………………………………………………………………3
1 Кинематическое исследование зубчатого механизма………………………...4
2 Вывод формулы для пошагового вычисления угловой скорости звена приведения………………………………………………………………
3 Определение приведенного момента инерции…………………………
4 Определение приведенного момента производственного (полезного) сопротивления и его работы…………………………………………………
5 Определение движущего приведенного момента на каждом промежуточном шаге вычислений……………………………………………………………….
6 Определение движущего момента и скорости для вычислений на первом шаге. Определение средней мощности………………………………………..
7 Порядок вычислений и результаты расчетов…………………………………..
Литература……………………………………………………………………….
ИСХОДНЫЕ ДАННЫЕ
Числа зубьев и модуль колес зубчатого механизма, номинальная
и синхронная частоты вращения двигателя
Z1 =16, Z2 =26, Z4 =19, Z4 =20,
Z5=19,
m
=6мм,
 2765
об/мин,
2765
об/мин,
 3000
3000
Размеры звеньев рычажного механизма
 ….,
….,
 ….,e
=….,
….,e
=….,
 ….,
….,
 ….
….
Массы и моменты инерции звеньев рычажного механизма:
m1=……, m2=……, m3=……,
IO1=….., IS2=…….
Максимальное
значение силы
 =….
=….
Моменты инерции звеньев привода
Iрот =…., (IZ1+Iмуф.) =….,
IZ2 =…., IZ4 =…., IZ5 =….
Масса сателлита и их число:
mc =…., Nc =….
Коэффициент неравномерности хода =….
1 Кинематическое исследование зубчатого механизма
Структурная схема механизма представлена на рисунке 1. Механизм имеет две ступени. Первая ступень – это простейшая зубчатая передача с неподвижными осями колес Z1 и Z2; вторая ступень – планетарная передача. Требуется определить угловые скорости всех звеньев и скорость центра масс сателлита планетарной ступени.
Угловую скорость колеса Z1 вычисляем по известной формуле при заданной номинальной частоте вращения ротора электродвигателя:
 .
(1)
.
(1)
Передаточное отношение от колеса Z1 к колесу Z2 равно
 .
(2)
.
(2)
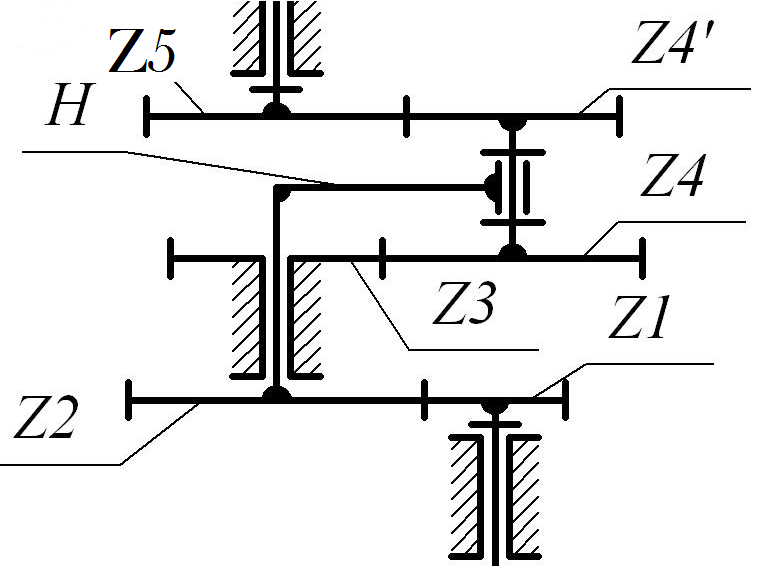
Рисунок 1– Схема зубчатого механизма
По формулам (1), (2) вычисляем передаточное отношение и скорости
 =
-1,625,
=
-1,625,
 289,403,
289,403, =-178,09.
=-178,09.
Для определения передаточного отношения планетарной ступени найдем незаданное число зубьев Z3 из условия соосности зацеплений сателлита с центральными колесами. Запишем равенство межосевых расстояний этих зацеплений
 ,
(3)
,
(3)
где
 –
радиусы начальных окружностей колес.
–
радиусы начальных окружностей колес.
Будем считать, что все зацепления планетарной ступени нулевые или равносмещенные. Тогда начальные окружности совпадают с делительными и условие (3) можно выразить через числа зубьев колес:
z3+z4=z5+z4’
Отсюда
z3=z5+z4’-z4
z3=19+20-19=20
Передаточное отношение планетарной ступени найдем с помощью формулы Виллиса.
Передаточное
отношение от водила Н
к колесу
 равно
равно

(4)
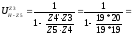
Передаточное отношение в обращенном движении (при остановленном водиле) выразим через числа зубьев колес:
 .
(5)
.
(5)
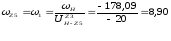
По
формуле (4), подставляя (5), вычислим
передаточное отношение планетарной
ступени. Учитывая, что
 ,
найдем также угловую скорость колесаZ5
и равную ей скорость кривошипа 1 рычажного
механизма:
,
найдем также угловую скорость колесаZ5
и равную ей скорость кривошипа 1 рычажного
механизма:
 -20
-20
Общее передаточное отношение редуктора равно произведению передаточных отношений ступеней:
 .
(6)
.
(6)
Подставив значения, вычислим
Uр =-1,625*(-20)=32,5
Для определения угловой скорости сателлита запишем передаточное отношение от сателлита к неподвижному колесу планетарной ступени через угловые скорости в обращенном движении и выразим его через числа зубьев:
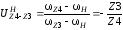 .
(7)
.
(7)
Учитывая,
что
 ,
,
 ,
находим
,
находим
 рад/с
рад/с
Центр
масс сателлита находится на оси его
симметрии, поэтому скорость
 равна скорости точки, расположенной в
конце водила:
равна скорости точки, расположенной в
конце водила:
 .
(8)
.
(8)
Величину
 возьмем по модулю;
возьмем по модулю; ,
м, – расстояние от оси вращения водилаН
до оси сателлита, равное межосевому
расстоянию в зацеплениях сателлита с
центральными колесами:
,
м, – расстояние от оси вращения водилаН
до оси сателлита, равное межосевому
расстоянию в зацеплениях сателлита с
центральными колесами:

 (z3+z4)=
(z3+z4)= (20+19)=117мм=0,117м
(9)
(20+19)=117мм=0,117м
(9)
Поставив (9) в формулу (8), вычислим
 =178.09*0.117=20.83
м/с
=178.09*0.117=20.83
м/с
Результаты кинематического исследования зубчатого механизма:


 20.83;
Uр
=32.5
20.83;
Uр
=32.5