

№11016 методичка
.pdf
|
|
2 |
|
|
|
РГППУ, МаИ, кафедра Механики |
Составитель Новгородова Н.Г. |
|
Задание № 3 |
Привод металлообрабатывающего |
|
|
станка |
|
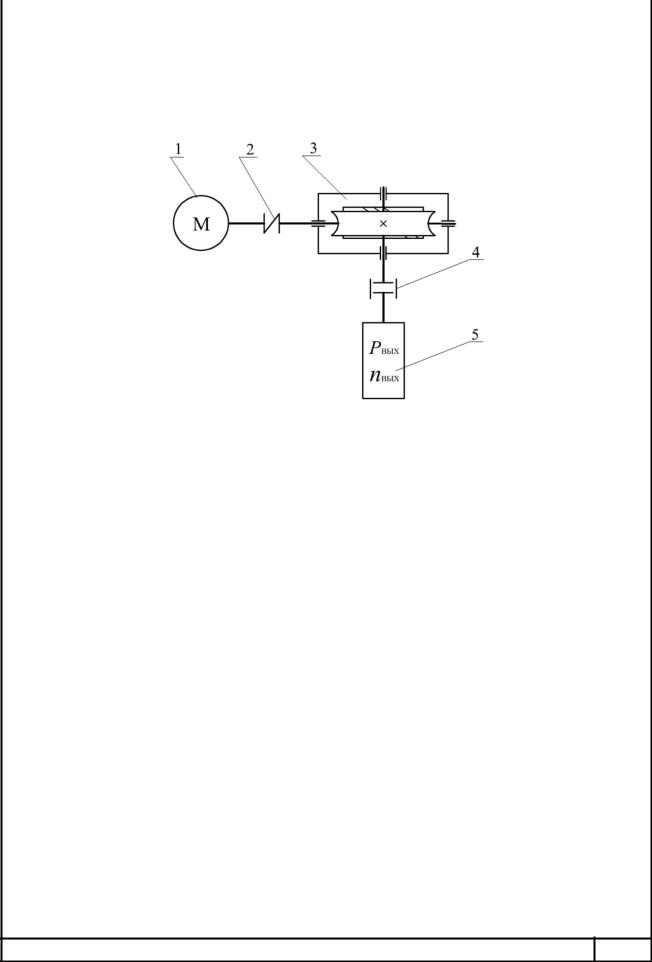
Рис. 3. Кинематическая схема привода металлообрабатывающего станка: 1 – электродвигатель; 2 – клиноременная передача; 3 – цилиндрический косо-
зубый редуктор; 4 – муфта зубчатая; 5 –станок
На рис. 3 обозначено: М – электродвигатель; РВЫХ – мощность на приводном валу станка; nВЫХ– частота вращения приводного вала станка
Таблица 3. Исходные данные к проектированию
|
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
10 |
|
|
РВЫХ, |
2,2 |
2,5 |
3,2 |
5,2 |
4,2 |
5,0 |
2,6 |
3,4 |
4,4 |
|
4,0 |
|
|
кВт |
|
|
|
|
|
|
|
|
|
|
|
|
|
n ВЫХ, |
48 |
36 |
80 |
90 |
58 |
69 |
75 |
59 |
41 |
|
65 |
|
|
об/мин |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u ОТК. ПЕР. |
4,0 |
4,5 |
4,0 |
4,5 |
3,5 |
4,5 |
5,0 |
5,0 |
4,5 |
|
3,5 |
|
|
K ГОД |
0,5 |
0,8 |
0,6 |
0,7 |
0,8 |
0,5 |
0,6 |
0,7 |
0,8 |
|
0,7 |
|
|
K СУТ |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,55 |
|
0,67 |
|
|
Режим |
|
|
|
|
|
|
|
|
|
|
|
|
|
нагруже- |
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
4 |
|
2 |
|
|
ния |
|
|
|
|
|
|
|
|
|
|
|
|
|
K ГОД , K СУТ – коэффициенты использования привода в году и в сутки |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лист |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
РГППУ, МаИ, кафедра Механики |
Составитель Новгородова Н.Г. |
|
Задание № 4 |
Привод металлообрабатывающего |
|
|
станка |
|
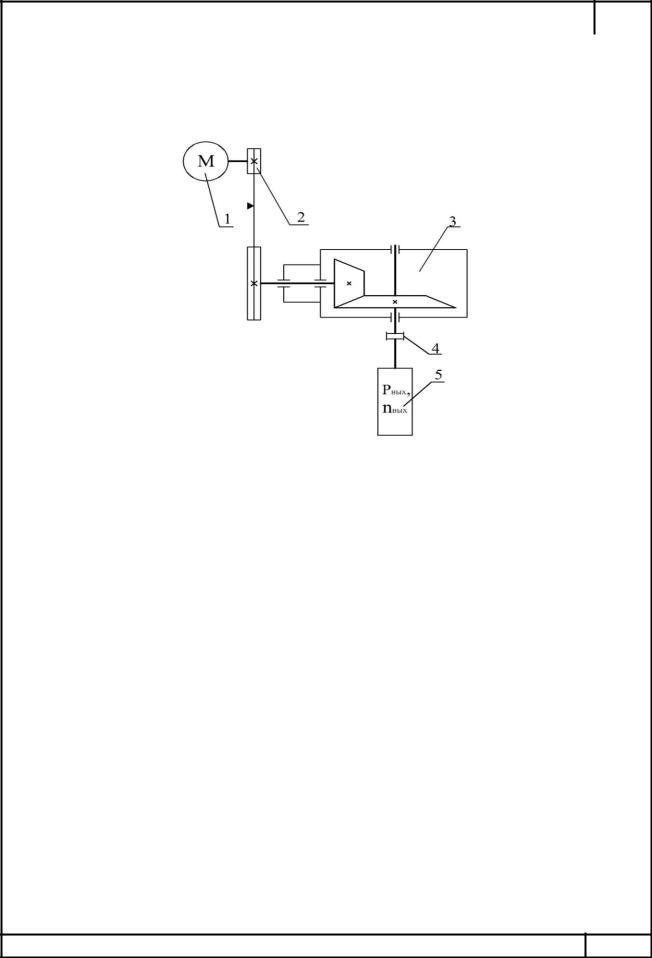
Рис. 4. Кинематическая схема привода станка: 1 – электродвигатель; 2 – муфта упругая;
3 – редуктор червячный; 4 – муфта зубчатая; 5 – станок
На рис. 4 обозначено: РВЫХ – мощность на приводной валу станка; nВЫХ – частота вращения приводного вала станка; М – электродвигатель
Таблица 4. Исходные данные к проектированию
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
РВЫХ, |
2,5 |
4,0 |
5,2 |
6,0 |
6,5 |
7,0 |
3,2 |
4,5 |
2,0 |
5,7 |
кВт |
|
|
|
|
|
|
|
|
|
|
nВЫХ, |
70 |
80 |
65 |
75 |
70 |
60 |
80 |
70 |
80 |
65 |
об/мин |
|
|
|
|
|
|
|
|
|
|
K ГОД |
0,5 |
0,8 |
0,6 |
0,7 |
0,8 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
K СУТ |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,55 |
0,67 |
Режим |
|
|
|
|
|
|
|
|
|
|
нагру- |
2 |
3 |
4 |
3 |
2 |
4 |
2 |
3 |
2 |
4 |
жения |
|
|
|
|
|
|
|
|
|
|
KГОД , KСУТ – коэффициенты использования привода в году и в сутки
Лист
32

|
|
4 |
|
|
|
РГППУ, МаИ, кафедра Механики |
Составитель: Новгородова Н.Г. |
|
Задание № 5 |
Привод металлообрабатывающего |
|
|
станка |
|
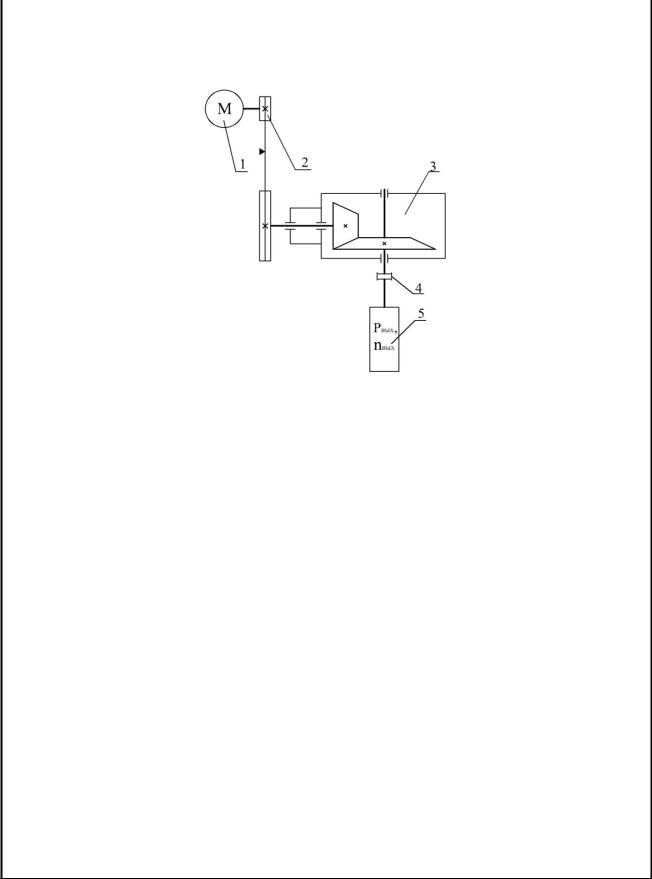
Рис. 5. Кинематическая схема привода зубофрезерного станка: 1 – электродвигатель; 2 – муфта упругая; 3 – редуктор червячный;
4 – муфта зубчатая; 5 – станок
На рис. 5 обозначено: М – электродвигатель; РВЫХ – мощность на приводной валу станка; nВЫХ – частота вращения приводного вала станка
Таблица 5. Исходные данные к проектированию
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
РВЫХ, |
2,9 |
5,75 |
3,8 |
4,6 |
6,3 |
7,0 |
3,8 |
3,6 |
2,4 |
6,4 |
|
кВт |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
nВЫХ, |
85 |
80 |
105 |
94 |
78 |
90 |
72 |
96 |
86 |
100 |
|
об/мин |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
K ГОД |
0,5 |
0,8 |
0,6 |
0,7 |
0,8 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
|
K СУТ |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,55 |
0,67 |
|
Режим |
|
|
|
|
|
|
|
|
|
|
|
нагруже- |
2 |
3 |
3 |
4 |
4 |
3 |
2 |
3 |
3 |
2 |
|
ния |
|
|
|
|
|
|
|
|
|
|
KГОД , KСУТ – коэффициенты использования привода в году и в сутки
Лист
33
5
РГППУ, МаИ, кафедра Механики |
Составитель: Новгородова Н.Г. |
|
Задание № 6 |
Привод металлообрабатывающего |
|
станка |
||
|
||
|
|
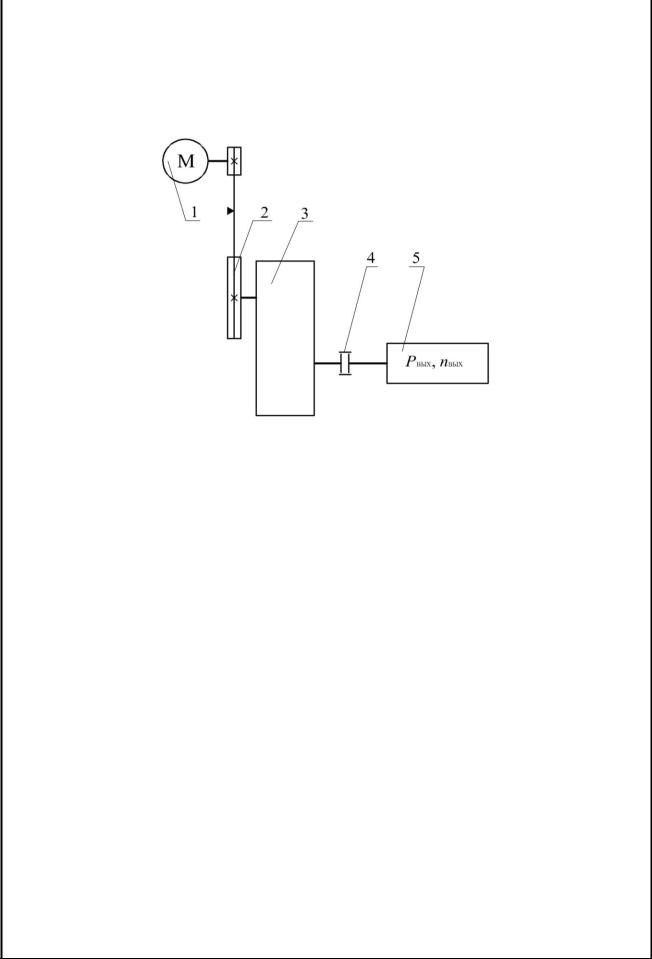
Рис. 6. Кинематическая схема привода металлообрабатывающего станка: 1 – электродвигатель; 2 – муфта упругая с колодочным тормозом;
3 – редуктор; 4 – муфта зубчатая; 5 – станок
На рис. 6 обозначено: М – электродвигатель; РВЫХ – мощность на приводной валу станка; nВЫХ – частота вращения приводного вала станка
Таблица 6. Исходные данные к проектированию
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Р, кВт |
2,5 |
2,4 |
3,2 |
4,7 |
3,7 |
2,8 |
3,5 |
4,8 |
4,7 |
2,6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
nВЫХ, |
51 |
62 |
67 |
57 |
47 |
39 |
48 |
35 |
72 |
79 |
|
об/мин |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
u ОТК. ПЕР. |
4,0 |
4,5 |
4,0 |
5,5 |
3,5 |
4,5 |
5,0 |
4,2 |
4,5 |
3,5 |
|
K ГОД |
0,5 |
0,8 |
0,6 |
0,7 |
0,8 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
|
K СУТ |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,55 |
0,67 |
|
Режим |
|
|
|
|
|
|
|
|
|
|
|
нагруже- |
2 |
3 |
3 |
4 |
4 |
3 |
2 |
3 |
3 |
2 |
|
ния |
|
|
|
|
|
|
|
|
|
|
KГОД , KСУТ – коэффициенты использования привода в году и в сутки
Лист
34

|
|
|
6 |
|
|
|
|
РГППУ, МаИ, кафедра Механики |
Составитель |
Новгородова Н.Г. |
|
Задание № 7 |
Привод |
манипулятора |
|
Рис. 7. Кинематическая схема привода манипулятора: 1 – электродвигатель; 2 – клиноременная передача; 3 – редуктор; 4 – муфта зубчатая; 5 – станок
На рис. 7 обозначено: РВЫХ – мощность на приводной валу;
nВЫХ – частота вращения приводного вала; М – электродвигатель
Таблица 7. Исходные данные к проектированию
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
РВЫХ, кВт |
4,8 |
6,0 |
5,7 |
3,2 |
2,5 |
3,7 |
2,8 |
4,2 |
2,7 |
4,0 |
|
n ВЫХ, |
60 |
85 |
78 |
75 |
70 |
80 |
65 |
70 |
85 |
70 |
|
об/мин |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
u ЦЕП. ПЕР. |
3,0 |
5,5 |
7,0 |
6,0 |
4,5 |
5,0 |
6,0 |
5,0 |
4,0 |
3,5 |
|
K ГОД |
0,5 |
0,8 |
0,6 |
0,7 |
0,8 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
|
K СУТ |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,55 |
0,67 |
|
Режим |
|
|
|
|
|
|
|
|
|
|
|
нагруже- |
2 |
3 |
3 |
4 |
4 |
3 |
4 |
2 |
3 |
2 |
|
ния |
|
|
|
|
|
|
|
|
|
|
KГОД , KСУТ – коэффициенты использования привода в году и в сутки
35
|
|
Лист |
|
|
7 |
|
|
|
РГППУ, МаИ, кафедра Механики |
Составитель Новгородова Н.Г. |
|
Задание № 8 |
Привод сварочного робота |
|
Рис. 8. Кинематическая схема привода сварочного робота: 1 – электродвигатель; 2 – клиноременная передача;
3 – редуктор; 4 – муфта зубчатая; 5 – сварочный робот
На рис. 8 обозначено: РВЫХ – мощность на приводной валу; nВЫХ – частота вращения приводного вала; М – электродвигатель;
Таблица 8. Исходные данные к проектированию
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
РВЫХ, |
2,5 |
4,0 |
5,2 |
6,0 |
6,5 |
7,0 |
3,2 |
4,5 |
2,0 |
5,7 |
|
кВт |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
nВЫХ, |
70 |
80 |
65 |
75 |
70 |
60 |
80 |
70 |
80 |
65 |
|
об/мин |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
u ОТК. ПЕР. |
4,0 |
4,5 |
4,0 |
5,5 |
3,5 |
4,5 |
5,0 |
4,2 |
4,5 |
3,5 |
|
K ГОД |
0,5 |
0,8 |
0,6 |
0,7 |
0,8 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
|
K СУТ |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,55 |
0,67 |
|
Режим |
|
|
|
|
|
|
|
|
|
|
|
нагруже- |
4 |
3 |
3 |
2 |
2 |
3 |
4 |
3 |
4 |
2 |
|
ния |
|
|
|
|
|
|
|
|
|
|
KГОД , KСУТ – коэффициенты использования привода в году и в сутки
36

|
|
Лист |
|
|
8 |
|
|
|
РГППУ, МаИ, кафедра Механики |
Составитель Новгородова Н.Г. |
|
Задание № 9 |
Привод поворотного стола |
|
Рис. 9. Кинематическая схема привода поворотного стола:
1 – электродвигатель; 2 – упругая муфта; 3 – редуктор червячный; 4 – муфта зубчатая; 5 – узел поворотного стола
На рис. 9 обозначено: Рвых – мощность на приводном валу;
nВЫХ – частота вращения приводного вала; М – электродвигатель
Таблица 9. Исходные данные к проектированию
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
РВЫХ, кВт |
6,0 |
8,8 |
6,3 |
9,0 |
9,2 |
9,5 |
6,4 |
4,5 |
4,7 |
3,5 |
|
|
|||||||||||
nВЫХ, об/мин |
50 |
55 |
65 |
70 |
60 |
75 |
70 |
80 |
90 |
90 |
|
K ГОД |
0,5 |
0,8 |
0,6 |
0,7 |
0,8 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
|
K СУТ |
0,3 |
0,67 |
0,50 |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,55 |
0,67 |
|
|
3 |
||||||||||
|
|
|
|
|
|
|
|
|
|
||
Режим |
3 |
2 |
3 |
2 |
2 |
2 |
3 |
4 |
4 |
4 |
|
нагружения |
|||||||||||
|
|
|
|
|
|
|
|
|
|
KГОД , KСУТ – коэффициенты использования привода в году и в сутки
37

|
|
|
Лист |
|
|
|
|
|
|
|
9 |
|
|
|
|
РГППУ, МаИ, кафедра Механики |
Составитель |
Новгородова Н.Г. |
|
Задание № 10 |
Привод |
манипулятора |
|
Рис. 10. Кинематическая схема привода манипулятора:
1 – электродвигатель; 2 – муфта упругая; 3 – редуктор червячный; 4 – муфта зубчатая; 5 – манипулятор
На рис. 10 обозначено: М – электродвигатель; Рвых – усилие на приводном манипулятора; nвых – частота вращения приводного вала манипулятора
Таблица 10. Исходные данные к проектированию
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Рвых, |
2,0 |
3,2 |
6,0 |
7,6 |
5,0 |
10,0 |
4,0 |
8,0 |
2,0 |
8,0 |
|
кВт |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
nвых, |
35 |
41 |
37 |
45 |
39 |
32 |
40 |
36 |
30 |
38 |
|
об/мин |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
K ГОД |
0,5 |
0,8 |
0,6 |
0,7 |
0,8 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
|
K СУТ |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,50 |
0,33 |
0,67 |
0,55 |
0,67 |
|
Режим |
|
|
|
|
|
|
|
|
|
|
|
нагруже- |
4 |
3 |
3 |
2 |
3 |
2 |
3 |
2 |
4 |
2 |
|
ния |
|
|
|
|
|
|
|
|
|
|
KГОД , KСУТ – коэффициенты использования привода в году и в сутки
38
|
|
Лист |
|
|
10 |
|
|
|
|
|
|
РГППУ, МаИ, кафедра Механики |
Составитель Новгородова Н.Г. |
|
Задание № 11 |
Привод сварочного вращателя |
|
Рис. 11. Кинематическая схема привода сварочного вращателя: 1 – электродвигатель; 2 – клиноременная передача; 3 – редуктор;
4 – муфта зубчатая; 5 – узел приводного барабана лебедки
На рис.11 обозначено: РВЫХ – мощность на приводном барабане; n ВЫХ – частота вращения приводного барабана; М – электродвигатель
Таблица 11. Исходные данные к проектированию
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Р ВЫХ, кВт |
6,2 |
4,7 |
9,4 |
6,5 |
13,0 |
6,1 |
4,8 |
9,3 |
4,5 |
6,3 |
|
n ВЫХ, об/мин |
60 |
40 |
70 |
73 |
65 |
41 |
62 |
55 |
45 |
35 |
|
u ОТК. ПЕР. |
4,0 |
4,5 |
4,0 |
5,5 |
3,5 |
4,5 |
5,0 |
4,2 |
4,5 |
3,5 |
|
K ГОД |
0,5 |
0,8 |
0,6 |
0,7 |
0,8 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
|
K СУТ |
0,3 |
0,6 |
0,5 |
0,3 |
0,7 |
0,5 |
0,3 |
0,6 |
0,5 |
0,7 |
|
Режим |
2 |
3 |
4 |
2 |
2 |
4 |
3 |
3 |
4 |
2 |
|
нагружения |
|||||||||||
|
|
|
|
|
|
|
|
|
|
KГОД , KСУТ – коэффициенты использования привода в году и в сутки
39

Лист
11
40