

6-2-воротников
.pdfИнтерфейс навигационной системы
Локационные системы роботов |
Оптические локационные системы |

Моделирование навигационной системы робота
Модель системы управления мобильным InDoor роботом приведена на рис. 108.
Рис. 108. Модель системы управления роботом компании Нейроботикс
Локационные системы роботов |
Оптические локационные системы |

Hector mapping. Сервисный робот МГТУ
Локационные системы роботов |
Оптические локационные системы |

Основы 3D-сканирования
Целью 3D-сканирования является получение трехмерной модели объекта или области
пространства. 3D-модели в дальнейшем могут быть обработаны средствами САПР и, в дальнейшем,
могут использоваться для разработки технологии изготовления (CAM) и инженерных расчётов (CAE, например, Универсальный механизм).
Для вывода 3D-моделей могут использоваться такие средства, как 3D-монитор, 3D-принтер (рис. 109, а) или фрезерный станок с поддержкой G-кода.
а |
б |
Рис. 109. Строительный 3D-принтер (а), лазерный 3D сканер Faro Focus 3D (б)
G-код (ГОСТ 20999-83) — условное именование языка программирования устройств с числовым
программным управлением (ЧПУ).
Сканер Faro Focus 3D (рис. 109, б) применяется для оцифровки крупногабаритных объектов, вплоть до зданий, и трехмерной съемки последствий ДТП. Расстояние до объекта может составлять 130 м., при этом точность сканирования достигает 0,015 мм.
Локационные системы роботов |
Оптические локационные системы |

Лазерный 3D сканер Faro Focus 3D, 2012 г.
Локационные системы роботов |
Оптические локационные системы |
Облако точек
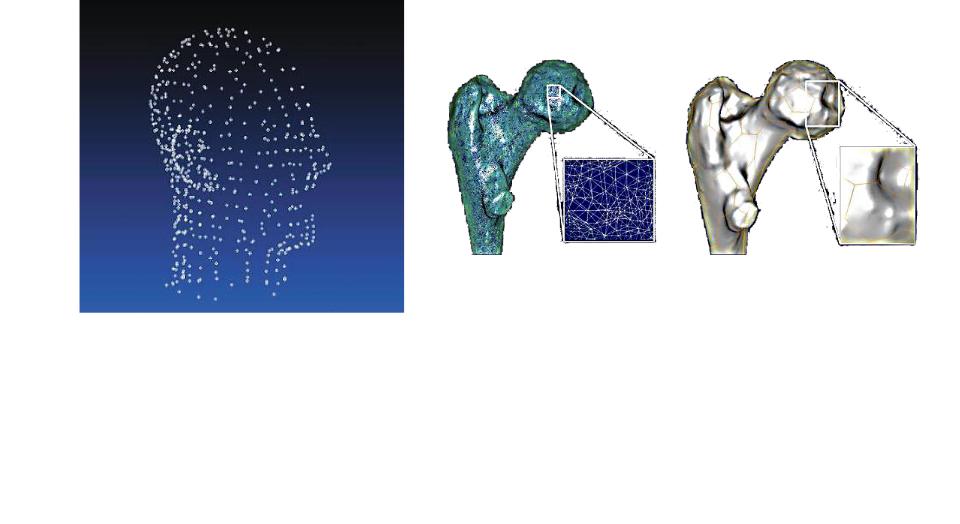
Технология 3D-сканирования основана на использования облака точек (англ. point cloud) — набора вершин, определяемых координатами X, Y и Z в трёхмерной системе координат. Эти вершины, как правило, предназначены для представления внешней поверхности объекта.
В программном обеспечении современных 3D-сканеров облако точек генерируется как файл данных в формате pcd (рис. 110, а).
б
а
Рис. 110. Пример облака точек объекта (а), полигональные модели (б)
Облака точек конвертируются в форматы САПР путем создания полигональных и твердотельных моделей объектов. Полигональные – это фасетные модели, которые состоят из множества треугольников, полученных путем соединения точек в облаке. Данные хранятся в STL файле (рис. 110, б).
Для обработки облаков точек используют библиотеку PCL(Point Cloud Library).
Локационные системы роботов |
Оптические локационные системы |

RGB SLAM . 3D схема загородного дома
Локационные системы роботов |
Оптические локационные системы |

Лазерное сканирование в геодезии
Локационные системы роботов |
Оптические локационные системы |

Системы автоматического управления автомобилем
В последние годы автомобильные концерны создают системы автоматического управления движением транспортного средства. Как правило, такая система состоит из двух базовых частей,
которые предназначены для управления:
скоростью автомобиля;
положения автомобиля на полосе движения.
Начало положили парковочные автопилоты компаний BMW, Ford, Mercedes-Benz, Nissan, Opel, Toyota, Volkswagen и др.
Затем Volkswagen создал систему «Временный автопилот» (Temporary Auto Pilot, TAP),
объединяющую в единое целое известные разработки: систему адаптивного круиз-контроля, систему помощи движению по полосе, систему распознавания дорожных знаков (рис. 111). Компания Audi создает первый серийный автопилот для движения в пробках (Traffic Jam Assistant).
Пионером в области систем полного управления движением была разработка компании Google, которая прошла опытную проверку на автомобилях Toyota Prius, Lexus RX 450h и Audi TT, проехавших в беспилотном
режиме несколько миллионов километров.
Сейчас некоторые компании создают свои решения, в
частности, компания Toyota (Automated Highway Driving Assist), Volvo и др.
Рис. 111. Автомобиль Volkswagen с системой «Временный автопилот»
Локационные системы роботов |
Оптические локационные системы |

Беспилотный автомобиль Google
Ядром системы, разработанной в 2011 г. является 64-лучевой лазерный дальномер Velodyne (рис. 110, а), установленный на крыше автомобиля. Прибор помогает сгенерировать детальную
объемную карту окружающего пространства. Затем машина комбинирует измерения лазера с
высокоточными картами мира и производит различные типы моделей данных, которые позволяют вести движение, избегая препятствия.
Также на борту установлены (рис. 111, б):
4 радара на переднем и заднем бамперах,
телекамера рядом с зеркалом заднего вида;
приёмник GPS,
блок инерциальных измерений (IMU),
колёсный одометр.
а
в
б
Рис. 111. Проект Google. Лазерный дальномер (а), схема (б), 3D карта (в)
Локационные системы роботов |
Оптические локационные системы |