

Практическая часть
В практической части будут рассмотрены 3 различные реализации преобразователя Гильберта, каждая со своими особенностями:
В пункте 2.1 будет рассмотрен фильтр, сформированный по формуле (1.4), реализация модели которого будет производиться на языке программирования С++.
В пункте 2.2 будет рассмотрен фильтр, сформированный по методу Паркса-Макклеллана в среде MatLab с помощью функции remez.
В пункте 2.4 оператор ДПГ будет сформирован по формуле (1.4) и затем оцифрован (дискретизирован по уровню) в среде ModelSim, на языке описания аппаратурыVerilog.
2.1 Реализация модели преобразователя на языке программирования C++
Пишем программу, состояющию из 3х блоков. Главный блок, в котором формируем оператор дискретного преобразования Гильберта, исходный сигнал, также в этом блоке будут использованы 2 других блока, один из которых отвечает за дискретную свёртку исходного сигнала с оператором дискретного преобразования Гильберта, а другой за округление отсчётов оператора дискретного преобразования Гильберта, чтобы чётные отсчёты были равно абсолютному нулю. Все результаты записываются в текстовые файлы, с помощью которых с помощью среды MatLabя построю графики.
Рассмотрим подробней параметры сигнала и преобразователя Гильберта.
Исходный дискретизированный по времени сигнал y:

, где i– отсчёты,frel– относительная частота, определяется как:

, где fsignal– частота сигнала,Td – период дискретизации сигнала.
В нашем случае frel= 1, что соответствует 4 отсчётам на период синуса.
Затем формируем оператор дискретного преобразования Гильберта по выведенной ранее в теоретической части формуле, при этом выполняя условия каузальности : отклик не может опережать воздействие, поэтому задерживаем оператор дискретного преобразования на (N-1)/2, гдеN– нечётное количество отсчётов оператора.

На рисунке 2.1.1 представлен полученный оператор дискретного преобразования.
Затем с помощью свёртки последовательностей находим свёртку исходного сигнала и оператора дискретного преобразования Гильберта. Результат показан на рисунке 2.1.2. Для того, чтобы убедиться что все операции проведены правильно, сравним полученный сигнал с отрицательным задержанным косинусом (см. теоретическую часть) на той же частоте, что и исходный синус. Задержка при сравнении необходима потому, что преобразование Гильберта само по себе задерживает полученный сигнал относительно исходного. В правильности проделанных операций можем убедиться на рисунке 2.1.3.
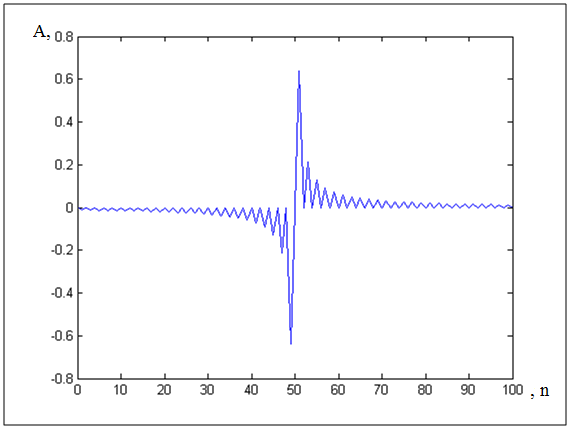
Рисунок 2.1.1 - Оператор дискретного преобразования Гильберта
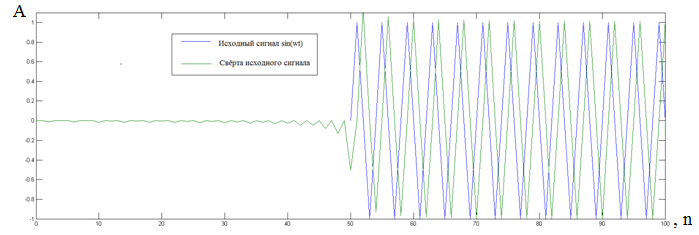
Рисунок 2.1.2 - Исходный сигнал и его свёртка
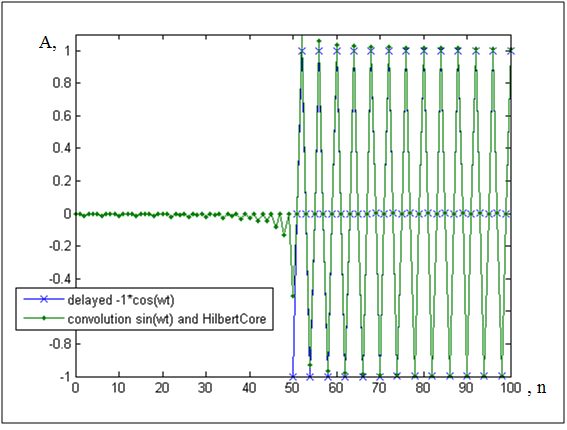
Рисунок 2.1.3 - Задержанный сигнал -cos(wt) и свёртка исходного сигнала
2.2 Реализация модели преобразователя в среде MatLab. Формирование и анализ различных характеристик преобразователя Гильберта.
Краткое описание функции remez:
Функция remez синтезирует нерекурсивный (FIR) дискретный фильтр с линейной ФЧХ по методу Паркса-Макклеллана (Parks-McClellan). Его суть состоит в итерационном поиске фильтра, АЧХ которого максимально точно совпадает с заданной. Фильтры, синтезированные таким методом, характеризуются равномерными пульсациями АЧХ, поэтому их иногда называют фильтрами с равномерными пульсациями (equiripple filters). Из-за равномерности пульсаций АЧХ импульсная характеристика синтезированного фильтра может резко обрываться по краям (в отличие от фильтров, синтезированных с использованием окон, где края импульсной характеристики всегда спадают плавно).
Синтаксис: b = remez(n, f, a, ‘ftype’);
Возвращает вектор b длины n+1, содержащий коэффициенты нерекурсивного (FIR) фильтра, частотная характеристика которого задается векторами f и a. Векторы f и a задают амплитудно-частотную характеристику фильтра следующим образом:
f — вектор пар частотных точек, лежащих в диапазоне от 0 до 1 (1 соответствует частоте Найквиста, то есть половине частоты дискретизации). Частоты должны образовывать неубывающую последовательность.
a — вектор, содержащий значения желаемой АЧХ для частот из вектора f.
Желаемая АЧХ на частотах между f(k) и f(k+1) при нечетном k определяется линейной функцией, соединяющей точки (f(k), a(k)) и (f(k+1), a(k+1)).
Желаемая АЧХ на частотах между f(k) и f(k+1) при четном k считается неопределенной. Эти полосы частот считаются переходными или неважными.
Векторы f и a должны быть одной длины и содержать четное число элементов.
На рис. 2.2.1 показана желаемая АЧХ фильтра, сформированная с помощью функции Remez с векторами:
f = [0 0.3 0.4 0.6 0.7 0.9]
a = [0 1 0 0 0.5 0.5]
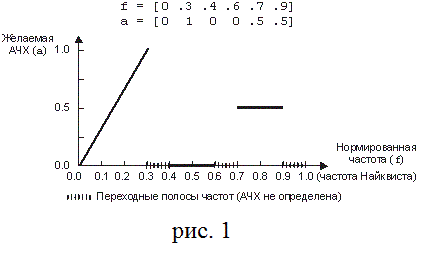
Рисунок 2.2.1 – пример реализации желаемоей АЧХ
фильтра с помощью функции remez
При формировании преобразователя Гильберта параметр ‘ftype’ == Hilbert. Преобразователь Гильберта имеет АЧХ равную единице во всём диапазоне рабочих частот.
Рассмотрим структурную схему, изображенную на рисунке 2.2.2 и реализуем её в MatLab.
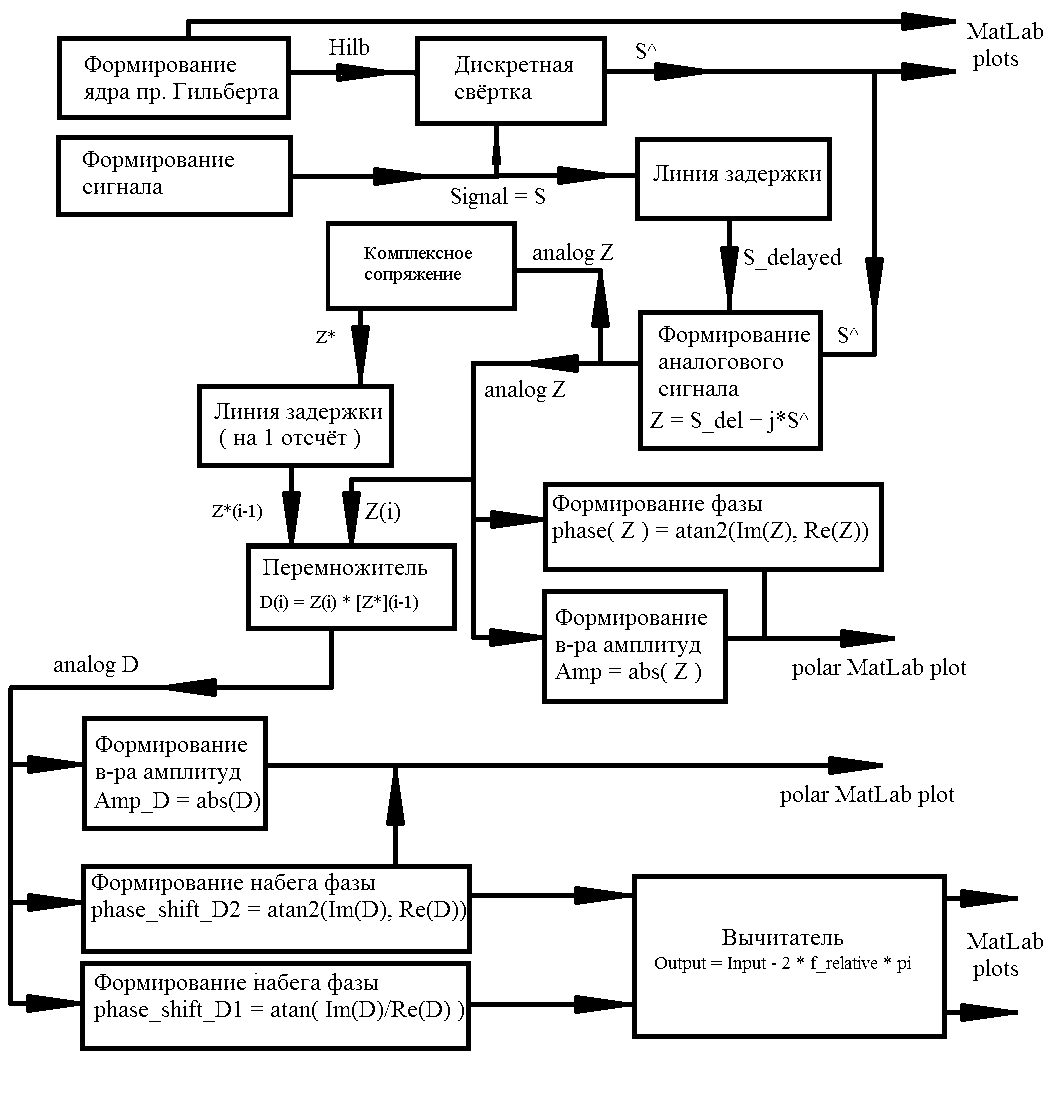
Рисунок 2.2.2 – Структурная схема, показывающая этапы исследования фазового шума в среде Matlab
Нам задан исходный сигнал S[i] , формируя ядро преобразования Гильберта Hilb[i], найдём сопряжённый по Гильберту сигнал:
В нашем случае мы воспользуемся дискретной свёрткой. Стоит отметить, что далее под фазовым шумом будет пониматься разница между полученной фазой сигнала и фазой сигнала, полученной с помощью идеального преобразователя Гильберта.
Затем формируем аналитический сигнал
 , где
, где - задержанный относительно
- задержанный относительно сигнал. Находим для
сигнал. Находим для комплексно сопряженный сигнал
комплексно сопряженный сигнал .
Учитывая, что сигнал
.
Учитывая, что сигнал получается с помощью неидеального
преобразователя Гильберта, то в нём
содержится фазовый шум ошибки предсказания
получается с помощью неидеального
преобразователя Гильберта, то в нём
содержится фазовый шум ошибки предсказания .
При экспоненциальном представлении
аналитического сигнала:
.
При экспоненциальном представлении
аналитического сигнала:


Далее
согласно выражению формируем аналитический
сигнал
 :
:


, где
 - фазовый шум сигналаd,A– амлпитуда,Td– период дискретизации,w- частота.
- фазовый шум сигналаd,A– амлпитуда,Td– период дискретизации,w- частота.
Тогда набег фазы равен :
Учитывая, что
 , где
, где – относительная частота,
– относительная частота, -
искомая ошибка оценки фазы .
-
искомая ошибка оценки фазы .
Получим:

Далее реализуем эти операции в среде MatLab.
По желаемой АЧХ (рисунок 2.2.3) формируем преобразователь Гильберта:
% Формирование ядра пр. Гильберта
N = 100; % задаём порядок фильтра
% по заданным параметрам формируем ядро преобр. Гильберта
hilb = remez ( N , [0.1 0.9], [ 1 1 ] , ‘Hilbert’);
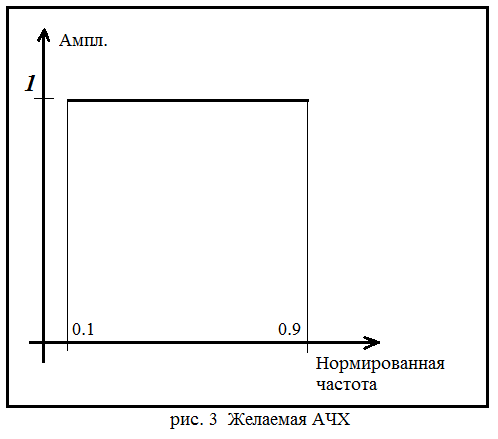
Рисунок 2.2.3 – Желаемая АЧХ
Формируем исходный сигнал:
% формируем исходный сигнал, задаём параметры:
M = 200 ; % кол-во отсчётов исходного сигнала
f_rel = 0.25; % относительная частота исходного сигнала, 4 отсчёта на период
S(1:M) = sin ( f_rel * 2 * pi * (0:M-1));
Дискретная свёртка:
% Производим дискретную свёртку:
S_linked( 1: (N + M) ) = 0;
for i = 1: (N + 1)
for j = 1:M
S_linked(i + j – 1) = S_linked(i + j – 1) + hilb(i) * S(j);
end
end
Также, для проверки правильности свёртки исходного синуса, произведём сравнение получившегося сигнала ( который, согласно теории должен стать отрицательным косинусом той же частоты) с отрицательным косинусом.
% Проверка результата свёртки Sin:
C_check( 1: (N + M) ) = -1 * cos ( f_rel * 2 * pi * ( (-N/2): (M + N/2 – 1) ) );
figure(1);
plot(0: (N + M – 1), S_linked, N/2: (N+M – 1), C_check( (N/2 + 1): (N+M) ) );
Получим следующий график ( рисунок 2.2.4 ).
Проведя краткий анализ рисунка 2.2.4 мы увидим, что полученная модель преобразователя согласовывается с теорией, и исходная синусная гармоника перешла косинусную.
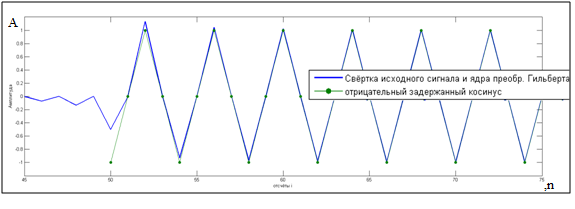
Рисунок 2.2.4 – График сравнения результата преобразования и результата идеального преобразования Гильберта
Линия задержки исходного сигнала:
% Задержим исходный сигнал:
S_delayed( 1: (N + M) ) = sin ( f_rel * 2 * pi * ((-N/2): (M + N/2 – 1)) );
% Формирование аналогового сигнала:
Z = S_delayed + sqrt(-1) * S_linked;
% Формирование вектора фазы:
phase_Z = atan2( imag(Z), real(Z) );
% Формирование вектора амплитуды:
amp_Z = abs( Z );
Строим график в полярный координатах:
polar( phase_Z(N/2:M+N/2), amp_Z(N/2:M+N/2));
Проведём краткий анализ риснука 2.2.5. Если бы этот сигнал был аналоговым (непрерывным по уровню и по времени), то его графиком в полярный координатах была бы окружность. Но учитывая, что мы берём отсчёты сигнала с частотой 4 отсчёта на период, то мы получили четырёхугольник. В итоге,результат оправдывает ожидания.
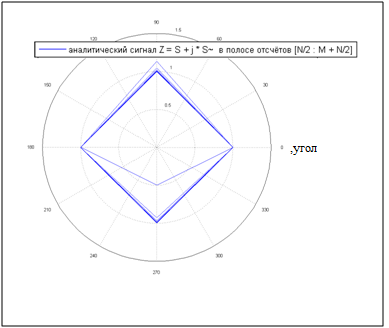
Рисунок 2.2.5 – График полученного в пункте 6 аналитического сигнала
Формирование аналитического сигнала D:
%Создаём комлпексно сопряженный сигнал Z_compl:
Z_compl = S_delayed – sqrt(-1) * S_linked;
% Формируем аналитический сигнал D:
for i = 1:N+M-1
D(i+1) = Z(i+1) * Z_compl(i);
end
Нахождение конечных параметров:
%Находим набег фазы:
phase_shift = atan2(imag(D), real(D));
%Находим фазовый шум:
n(2:N+M) = phase_shift(2:N+M) – 2*pi*f_rel;
На рисунках 2.2.6 и 2.2.7 изображены полученные графики фазового шума
(График, изображенный на рисунке 2.2.6 симметричен относительно центрального отсчёта ( [N+M] /2 )
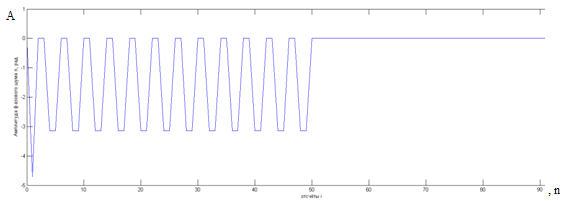
Рисунок 2.2.6 – график зависимости фазового шума от номера отсчёта
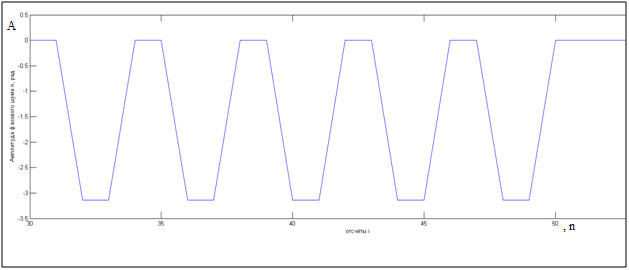
Рисунок 2.2.7 – Переходный участок графика зависимости
фазового шума от номера отсчёта