

53. Сложение вращений тела вокруг двух осей
На
рис. 54 изображено тело, которое совершает
сложное движение – вращение вокруг
оси, которая сама вращается вокруг
другой, неподвижной оси. Естественно,
первое вращение следует назвать
относительным движением тела, второе
– переносным, а соответствующие оси
обозначить
![]() и
и
![]() .
.

Рис.54
Абсолютным
движением будет вращение вокруг точки
пересечения осей О.
(Еcли
тело имеет больший размер, то его
точка, совпадающая с О,
все время будет неподвижной). Угловые
скорости переносного вращения и
относительного вращения изображается
векторами
![]() и
и
![]() ,
отложенными из неподвижной точки О,
точки пересечения осей, по соответствующим
осям.
,
отложенными из неподвижной точки О,
точки пересечения осей, по соответствующим
осям.
Найдем
абсолютную скорость какой-нибудь точки
М
тела, положение которой определяется
радиусом-вектором
![]() (рис.54).
(рис.54).
Как
известно, она складывается из двух
скоростей, относительной и переносной:
![]() .
Но относительное движение точки
(используя правило остановки), есть
вращение с угловой скоростью
.
Но относительное движение точки
(используя правило остановки), есть
вращение с угловой скоростью
![]() вокруг оси
вокруг оси
![]() ,
определяется радиусом-вектором
,
определяется радиусом-вектором
![]() .
Поэтому,
.
Поэтому,
![]() .
.
Переносное
движение точки в данный момент времени,
опять используя правило остановки,
тоже есть вращение, но вокруг оси
![]() с угловой скоростью
с угловой скоростью
![]() и будет определяться тем же радиусом-вектором
и будет определяться тем же радиусом-вектором
![]() .
Поэтому и переносная скорость
.
Поэтому и переносная скорость
![]() .
.
Абсолютная
же скорость, скорость при вращении
вокруг неподвижной точки О,
при сферическом движении, определяется
аналогично
![]() ,
где
,
где
![]() - абсолютная угловая скорость,
направленная по мгновенной оси вращения
Р.
- абсолютная угловая скорость,
направленная по мгновенной оси вращения
Р.
По
формуле сложения скоростей получим:
![]() или
или
![]() .
.
Отсюда
![]()
То
есть мгновенная угловая скорость,
угловая скорость абсолютного движения,
есть векторная сумма угловых скоростей
переносного и относительного движений.
А мгновенная ось вращения P,
направленная по вектору
![]() ,
совпадает с диагональю параллелограмма,
построенного на векторах
,
совпадает с диагональю параллелограмма,
построенного на векторах
![]() и
и
![]() (рис.54).
(рис.54).
Частные случаи:
1.
Оси вращения
![]() и
и
![]() параллельны, направления вращений
одинаковы (рис. 55).
параллельны, направления вращений
одинаковы (рис. 55).

Рис.55
Так
как векторы
![]() и
и
![]() параллельны и направлены в одну сторону,
то абсолютная угловая скорость по
величине равна сумме их модулей
параллельны и направлены в одну сторону,
то абсолютная угловая скорость по
величине равна сумме их модулей
![]() и вектор ее направлен в туже сторону.
Мгновенная ось вращения Р
делит расстояние
между осями на части обратно
пропорциональные
и вектор ее направлен в туже сторону.
Мгновенная ось вращения Р
делит расстояние
между осями на части обратно
пропорциональные
![]() и
и
![]() :
:
![]() .
(Аналогично равнодействующей параллельных
сил).
.
(Аналогично равнодействующей параллельных
сил).
В
этом частном случае тело А
совершает плоскопараллельное движение.
Мгновенный центр скоростей
![]() находится на оси Р.
находится на оси Р.
2. Оси вращения параллельны, направления вращений противоположны (рис.56).
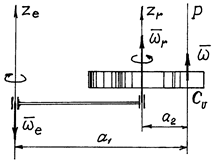
Рис.56
В
этом случае
![]() (при
(при
![]() ).
Мгновенная ось вращения и мгновенный
центр скоростей находятся за вектором
большей угловой скорости на расстояниях
таких, что
).
Мгновенная ось вращения и мгновенный
центр скоростей находятся за вектором
большей угловой скорости на расстояниях
таких, что
![]() (опять по аналогии определения
равнодействующей параллельных сил).
(опять по аналогии определения
равнодействующей параллельных сил).
3. Оси вращения параллельны, направления вращений противоположны и угловые скорости равны.
Угловая
скорость абсолютного движения
![]() и, следовательно, тело совершает
поступательное движение. Этот случай
называется парой
вращений, по
аналогии с парой сил.
и, следовательно, тело совершает
поступательное движение. Этот случай
называется парой
вращений, по
аналогии с парой сил.
54.


Можно рассмотреть далее и случай, когда тело участвует в трех вращениях относительно пересекающихся осей.
В результате получим следующие выводы.
Если тело участвует в двух или нескольких вращениях относительно пересекающихся осей, то :
1. В каждый момент движение тела является мгновенно вращательным. Мгновенная ось вращения проходит через точку пересечения осей. Вектор мгновенной угловой скорости тела равен геометрической сумме векторов угловых скоростей в каждом из вращений.
2. Движение тела является сферическим - то есть движением относительно неподвижной точки пересечения осей.
3. Скорости точек тела при его сферическом движении можно определять как в мгновенно вращательном движении, так и по формулам сложного движения.
55. Сложение поступательного и вращательного движений. Винтовое движение.
Если
сложное движение тела слагается из
вращательного вокруг оси Аа
с угловой скоростью
![]() и
поступательного со скоростью
и
поступательного со скоростью
![]() ,
направленной параллельно оси Аа
(рис.63), то такое движение тела называется
винтовым. Ось Аа
называют осью винта. Когда векторы
,
направленной параллельно оси Аа
(рис.63), то такое движение тела называется
винтовым. Ось Аа
называют осью винта. Когда векторы
![]() и
и
![]() направлены в одну сторону, то при принятом
нами правиле изображения
направлены в одну сторону, то при принятом
нами правиле изображения
![]() винт будет правым; если в разные стороны,
- левым.
винт будет правым; если в разные стороны,
- левым.
Расстояние,
проходимое за время одного оборота
любой точкой тела, лежащей на оси винта,
называется шагом h
винта. Если величины
![]() и
и
![]() постоянны, то шаг винта также будет
постоянным. Обозначая время одного
оборота через Т,
получаем в этом случае
постоянны, то шаг винта также будет
постоянным. Обозначая время одного
оборота через Т,
получаем в этом случае
![]() и
и
![]() ,
откуда
,
откуда
![]() .
.

Рис.63
При
постоянном шаге любая точка М
тела, не лежащая на оси винта, описывает
винтовую линию. Скорость точки М,
находящейся от оси винта на расстоянии
![]() ,
слагается из поступательной скорости
,
слагается из поступательной скорости
![]() и перпендикулярной ей скорости, получаемой
во вращательном движении, которая
численно равна
и перпендикулярной ей скорости, получаемой
во вращательном движении, которая
численно равна
![]() .
Следовательно,
.
Следовательно,
![]() .
.
Направлена
скорость
![]() по касательной к винтовой линии. Если
цилиндрическую поверхность, по которой
движется точка М,
разрезать вдоль образующей и развернуть,
то винтовые линии, обратятся в прямые,
наклоненные к основанию цилиндра под
углом
по касательной к винтовой линии. Если
цилиндрическую поверхность, по которой
движется точка М,
разрезать вдоль образующей и развернуть,
то винтовые линии, обратятся в прямые,
наклоненные к основанию цилиндра под
углом
![]() .
.