

2.1.1 Погрешности бинс.
Необходимо проанализировать погрешности, возникающие в процессе эксплуатации БИНС.
Режим (алгоритм) работа ИНС, когда её элементы и устройства идеальны (не имеют инструментальных погрешностей) и начальные условия функционирования системы точно соответствуют начальным обстоятельствам движения объекта, называют режимом (алгоритмом) идеальной работы. В реальных условиях инерциальным чувствительным элементам присущи различного рода погрешности.
Режим работы ИНС, при котором её элементы функционируют с погрешностями и начальные условия не соответствуют начальным обстоятельствам движения объекта называют возмущением.
Уравнения для отклонения переменных, характеризующих состояния БИНС, от их значений при идеальной работе, называют уравнением погрешностей[31]. Анализируя погрешности, можно в определенной степени упростить алгоритмы, по которым работает вычислительное устройство, а также выработать обоснованные требования к коррекции БИНС.
Ошибки БИНС в случае неточного определения вертикали.
Рассмотрим случай, когда акселерометры и гироскоп функционируют без ошибок, а вертикаль в начальный момент задана с ошибкой. В этом случае безошибочные показания акселерометров определяются равенствами[30](предполагается, что :

 (2.1)
(2.1)
где nx, ny – величина кажущегося ускорения относительно осей х и y, VXg - скорость, θ - угол.
Для
определения местоположения БЛА (широты
φ) необходимо перепроектировать показания
акселерометров (2.1) в географическую
систему координат, т.е. на оси О
 и О
и О
 Однако за счёт неточного задания
вертикали сигналы акселерометров (2.1)
будут пересчитываться не на оси
географического трехгранника, а на оси
Однако за счёт неточного задания
вертикали сигналы акселерометров (2.1)
будут пересчитываться не на оси
географического трехгранника, а на оси

 и
и
 вычисленной системы координат. В этом
случае получим:
вычисленной системы координат. В этом
случае получим:

 (2.2)
(2.2)
где

 - проекция кажущегося ускорения на
географическую систему координат, β -
угол
- проекция кажущегося ускорения на
географическую систему координат, β -
угол
Для малого угла β, подставив (2.2) в (2.1), получим проекцию кажущегося ускорения:

 (2.3)
(2.3)
Таким
образом, после пересчёта данных в
географическую систему координат в
проекции кажущегося ускорения 
 содержится составляющая вектора
ускорения силы тяжести.
содержится составляющая вектора
ускорения силы тяжести.
Согласно дальнейшим расчетам [31]
β(t)=
 (2.4)
(2.4)
где



Эту
частоту можно трактовать, как частоту
малых незатухающих колебаний в поле
силы тяжести Земли физического маятника,
приведенная длина которого равна
расстоянию от центра Земли до объекта,
движущегостя на высоте h.
Числовое значение частоты Шулера равно

 ,
соответственно период Шулера Т=84,4[*].
,
соответственно период Шулера Т=84,4[*].
Из решения следует, что вычисленная вертикаль будет совершать колебания относительно истинной вертикали с периодом Шулера.
Согласно расчётам [31], ошибка определения скорости связана с ошибкой построения вертикали.

 (2.5)
(2.5)
Ошибка определения широты:
Δφ=
 (2.6)
(2.6)
Ошибка определения пройденного расстояния ΔS:
ΔS=R
 (2.7)
(2.7)
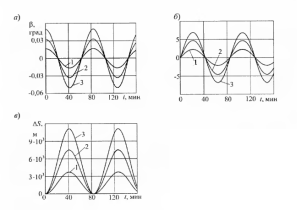
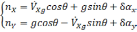
На рисунке 2.1 показаны ошибки БИНС, вызванные неточным заданием вертикали, таким образом, отклонение аналитической вертикали от истинной, ошибки в определении скорости и местонахождения БЛА имеют колебательный характер, период их колебания равен периоду Шулера.
Рисунок
2.1 Ошибки БИНС, вызванные неточным
задание вертикали: а) ошибка построения
вертикали б) ошибка определения скорости,
в) ошибка в определении пройденного
расстояния; 1 - 
 2 -
2 -
 3 -
3 -
 .
.
Ошибки БИНС, вызванные погрешностью акселерометров.
Пусть
в БИНС начальные условия выдержаны
точно, а в показаниях акселерометров
имеются погрешности (смещение нуля)
δ
 и δ
и δ
 В этом случае уравнения(2.1) примут вид:
В этом случае уравнения(2.1) примут вид:
 (2.8)
(2.8)
проекцию кажущегося ускорения:

 (2.9)
(2.9)
где

 sinθ
– проекция ошибок акселерометров на
ребро О
sinθ
– проекция ошибок акселерометров на
ребро О

β(t)=


Из
решения следует, что погрешности
акселерометра вызывают колебания
вертикали с периодом Шулера относительно
смещенного от истинной вертикали
положения равновесия на величену β(t)=

 колебаний равна ошибке акселерометра
в доле ускорения силы тяжести
колебаний равна ошибке акселерометра
в доле ускорения силы тяжести
 .
.
Ошибка определения скорости.

 (2.11)
(2.11)
Ошибка определения широты и пройденного расстояния:
Δφ=
 (2.12)
(2.12)
ΔS=
 (2.13)
(2.13)
На рисунке 2.2 показаны ошибки вызванные погрешностью акселерометров.
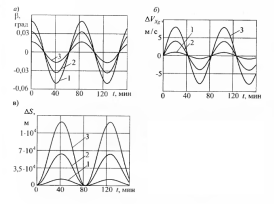
Рисунок
2.2 Ошибки БИНС, вызванные погрешностью
акселерометра: а) ошибка построения
вертикали б) ошибка определения скорости,
в) ошибка в определении пройденного
расстояния; 1 - 
 2 -
2 -
 3 -
3 -
 .
.
Ошибки БИНС, вызванные дрейфом гироскопов
Пусть теперь начальные данные выдержаны точно, акселерометр функционирует идеально, а датчик угловой скорости измеряет абсолютную угловую скорость БЛА с ошибкой ε. Найдем ошибку в определении тангажа. Тангаж определяется[30], как результат интегрирования относительно угловой скорости связанного трехгранника

 (2.14)
(2.14)
где – ωx, ωz-; ε-собственный дрейф гироскопа
Наличие
собственного дрейфа гироскопа ε приведет
к погрешности в определении проекции

 абсолютной
угловой скорости связанного и
географического трехгранников,
соответственно. Расчетное значение
угла тангажа можно представить в виде:
абсолютной
угловой скорости связанного и
географического трехгранников,
соответственно. Расчетное значение
угла тангажа можно представить в виде:

где

 - рассчитанная с помощью БИНС проекция
угловой скорости географического
трехгранника.
- рассчитанная с помощью БИНС проекция
угловой скорости географического
трехгранника.
После некоторых преобразований [31] получаем связь между истсинным и вычисленным значением тангажа
θ-
 =β
или Δθ=β (2.16)
=β
или Δθ=β (2.16)
Таким образом, при одноканальном анализе БИНС ошибка выработки тангажа равно ошибке построения вертикали с обратным знаком.
Ошибки определение вертикали, скорости, широты и пройденного пути:
β(t)=
-


 (2.18)
(2.18)
Δφ=
 (2.19)
(2.19)
ΔS=
 (2.20)
(2.20)
где-
Из
формул видно, что вычисленная вертикаль
по –прежнему совершает колебания
истинной вертикали с частотой Шулера
и амплитудой 
 .
В ошибке определения скорости имеется
постоянная составляющая, пропорциональная
радиусу Земли. Нарастание со временем
погрешности БИНС является главным их
недостатком.
.
В ошибке определения скорости имеется
постоянная составляющая, пропорциональная
радиусу Земли. Нарастание со временем
погрешности БИНС является главным их
недостатком.
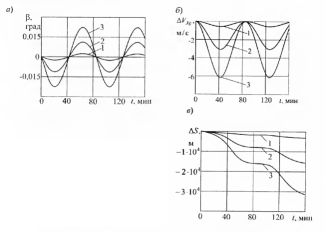
Рисунок
2.3 Ошибки БИНС, вызванные дрейфом
гироскопа: а) ошибка построения вертикали
б) ошибка определения скорости, в) ошибка
в определении пройденного расстояния;
1 – 
 2 -
2 -
 3 -
3 -
 .
.
Ошибки вертикального канала БИНС.
Рассмотрим погрешности вертикального канала, вызванные ошибкой компенсации ускорения силы тяжести g
Положим, гироскоп и акселерометры работают без ошибок, а начальные данные введены точно. В соответствии с принципом работы вертикального канала найдем ошибку в определении вертикальной скорости БЛА, как разность между вычисленной и истинной вертикальной скоростью

 (2.21)
(2.21)
Из [31] находим:

 (2.22)
(2.22)
где

 - ошибка компенсации ускорения силы
тяжести
- ошибка компенсации ускорения силы
тяжести
Очевидно, что ошибка в определении высоты выглядит так

 (2.23)
(2.23)
Из формул можно заключить, что ошибки в определении вертикальной скорости и высоты с помощью БИНС растут неограниченно. Беспредельный рост ошибок вертикального канала БИНС называется неустойчивостью этого канала.
Ошибки определение вертикали, скорости, широты и пройденного пути:
β(t)=-
-


 (2.25)
(2.25)
ΔS=
 (2.26)
(2.26)
Из соотношений видно, что при отсутствии вектора ускорения силы тяжести ошибка построения вертикали, а также ошибки в определении скорости и координаты, вызванные смещением нуля акселерометра, неограниченно возрастает.