

6.3. Реле времени
Реле времени создает регулируемую выдержку времени от момента подачи сигнала на срабатывание до момента замыкания (или размыкания) контактов. Программное реле — это разновидность реле времени с несколькими контактами, имеющими различные регулируемые, как правило, независимые друг от друга выдержки времени. Например, существуют реле счета импульсов, контакты которых замыкаются после отсчета заранее заданного числа импульсов, подаваемых на катушку управления. Устройство таких реле имеет много общего с шаговыми искателями.
Для создания выдержки времени применяются электрический разрядный RC - контур, электромагнитные реле с короткозамкнутыми гильзами, механические механизмы (анкерный и планетарный), пневматические и др.
На рис. 6.6 дана схема реле времени с пъезокерамическим элементом. Пьезокерамические материалы, полученные, например, на основе титаната бария, обладают свойством изменять свои линейные размеры в электрическом поле. Пьезокерамический биморфный элемент (БЭ) состоит из двух прочно склеенных пластинок, на наружных поверхностях которых, а также в месте их соединения размещены металлические обкладки. Верхний слой элемента в электрическом поле удлиняется, нижний — укорачивается. В результате этот элемент, консольно закрепленный на одном конце, изгибается, что приводит к замыканию контакта К1. При снятии электрического поля с обкладок деформация биморфного элемента исчезает, контакт К1 размыкается, а контакт К2 замыкается.

Рисунок 6.6. Схема реле времени с пьезокерамическим элементом.
При замкнутой кнопке управления (КУ) конденсатор С и обкладки БЭ заряжены до напряжения U0 и сам БЭ деформирован. При отключении КУ начинается разряд конденсатора С на резистор R. Напряжение на обкладках БЭ постепенно снижается, и его механическая деформация также постепенно исчезает.
Процесс разряда конденсатора описывается уравнением
![]()
Решение этого уравнения при начальном условии t = 0 и I = I0 имеет вид
![]()
Изменение напряжения на конденсаторе в обкладках БЭ описывается аналогичной зависимостью
![]()
Допустим, что реле срабатывает и его контакт К2 замыкается, когда напряжение снизится до значения Ucpa6. Тогда время срабатывания
![]()
Реле времени с электромагнитным замедлением (электромагнитное реле времени) основано на использовании вихревых токов для замедления срабатывания электромагнитной системы. На магнитопровод 1 (рис. 6.7) надета металлическая (обычно медная) гильза (или шайба) 3, равнозначная короткозамкнутой обмотке с одним витком. Когда изменяется основной поток Фо, созданный током катушки 2, в гильзе 3 наводятся вихревые токи, поток Фвх от которых имеет направление, препятствующее изменению основного потока в соответствии с принципом инерции Ленца. Когда поток Фо нарастает, поток Фвх имеет противоположное направление, а когда Фо снижается — направление Фвх совпадает с Фо.
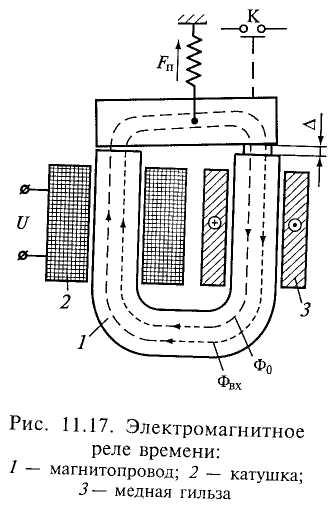
Рисунок 6.7. Электромагнитное реле времени:
1-магнитопровод; 2- катушка; 3- медная гильза.
Широко распространены реле времени с механическим замедлением, в частности с часовым механизмом. В таких реле (рис. 6.8) при подаче напряжения на электромагнитный привод 1 растягивается пружина 2 и часовой механизм приходит в действие. Анкер 4, поворачиваясь вокруг оси О2, «перепускает» зубчатый диск 3, который вращается вокруг оси О1. Перемещающийся вместе с ним рычаг 8 в конце пути упирается в пластинчатый контакт 9 и замыкает его. Храповой механизм дает подвижной системе реле возможность возвратиться в исходное положение, когда будет снято напряжение электромагнитного привода 1. Возврат осуществляется специальной пружиной (на рисунке не показана). Изменяя расстояние от грузика 5 до оси О2 и массу грузика, можно регулировать момент инерции анкера и через него — выдержку времени реле.

Рисунок 6.8 Реле времени с анкерным механизмом:
1-электромагнитный привод; 2- пружина; 3- зубчатый диск; 4- анкер; 5- грузик; 6- храповое колесо; 7- собачка; 8- рычаг; 9- пластинчатый контакт
Выдержка времени, создаваемая реле с часовым механизмом,
![]()
где α — угол поворота подвижной системы от начала движения до замыкания контактов; n — передаточное число зубчатого механизма; z — число зубьев ходового колеса; Tа — период колебаний анкера,
![]()
здесь J — момент инерции анкера; φ — угол поворота анкера при колебаниях; Мдв — момент, создаваемый движущимися силами; Mпрд — момент, создаваемый противодействующими силами.
В некоторых реле применяется пневматическое или гидравлическое замедление. Изменением сечения отверстия, через которое проникает воздух (или жидкость) из одного объема в другой, достигается регулировка выдержки времени. Наиболее высокие выдержки времени (до несколько часов) достигаются в реле с планетарным механизмами.