

3.2. Электроконтактные датчики
Контактные датчики — это датчики параметрического типа, в которых изменяется электрическое сопротивление при изменении той или иной механической величины. Они предназначены для преобразования механического перемещения в электрический сигнал. При достижении измеряемой величиной определенного значения замыкаются или размыкаются электрические контакты, включенные в те или иные цепи, которые сигнализируют, что перемещение больше или меньше определенного значения.
Контактные датчики широко применяются в системах автоматического контроля и сортировки размеров, а также в системах автоматической сигнализации различных физических величин. Статическая характеристика контактного датчика имеет релейный характер, так как его выходная величина — сопротивление электрической цепи — изменяется скачком.
На рис. 3.1, а изображен простейший контактный датчик с одной парой контактов — однопредельный. Замыкание контактов1 и 2 происходит в результате изменения размера изделия И. Если размер изделия И увеличивается, то измерительный щуп 3 перемещается вверх, в результате чего контакты 1 и 2 приходят в соприкосновение. При этом активное сопротивление между контактами 1 и 2 изменяется от бесконечности до ничтожно малого значения, определяемого контактным сопротивлением. Выводы датчика подключаются к сигнальному устройству. Пружина 4 соединяет измерительный щуп 3 с одним из выводов.
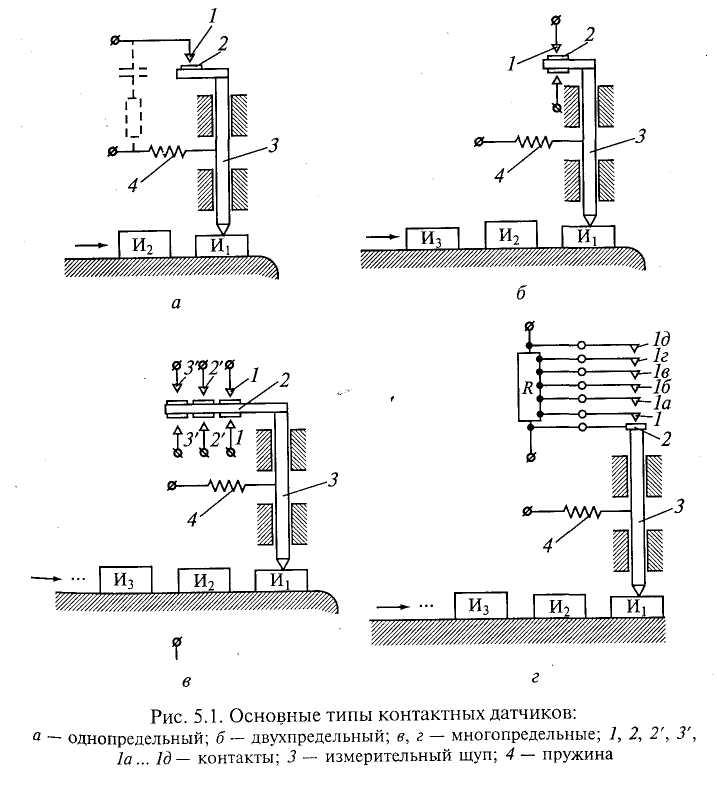
Рисунок 3.1 Основные типы контактных датчиков:
а- однопредельный, б- двухпредельный, в,г- многопредельные.
1,2,2’,3’,1а…1д – контакты, 3- измерительный щуп, 4- пружина.
На рис. 3.1, б изображен двухпредельный контактный датчик — с двумя парами контактов, способный реагировать на перемещение щупа в обе стороны от начального (нулевого) положения. Подобные датчики широко используются для автоматического контроля размеров деталей и подсчета количества выпускаемой продукции.
Многопредельный контактный датчик с несколькими парами контактов показан на рис. 3.1, в. Его контакты 1, 2' и 3' замыкаются последовательно друг за другом в зависимости от размеров деталей. Стрелка измерительного прибора, включенного на выходе датчика, показывает три размера.
Иногда контактные датчики могут работать либо на замыкание (размыкание) всей цепи, либо на замыкание части одного из сопротивлений R резистора цепи (рис. 3.1, г).
3.3. Потенциометрические датчики
Измерительные преобразователи, выполненные в виде реостата, подвижный контакт которого перемещается под воздействием входной измеряемой величины, называются реостатными измерительными преобразователями. Чаще всего реостатные ИП включаются в измерительную цепь по схеме потенциометра, поэтому в ряде источников используется термин «потенциометрические преобразователи».
Выходной величиной ИП является электрическое сопротивление, функционально связанное с положением подвижного контакта. Реостатные преобразователи служат для преобразования угловых или линейных перемещений в соответствующее изменение сопротивления, тока или напряжения. Так как в перемещение могут быть преобразованы многие неэлектрические величины (давление, расход, уровень и др.), то реостатные преобразователи очень часто используют в качестве промежуточных преобразователей неэлектрических величин в электрические.
В зависимости от материала чувствительного элемента реостатные преобразователи разделяются на проволочные и непроволочные.
В устройствах автоматики широко применяют проволочные реостатные преобразователи, которые отличаются высокой точностью и стабильностью функции преобразования, имеют малое переходное сопротивление, низкий уровень собственных шумов, малый температурный коэффициент сопротивления (ТКС). К их недостаткам относятся низкая разрешающая способность, сравнительно невысокое сопротивление (до десятков кОм), ограниченная возможность применения на переменном токе, обусловленная остаточными индуктивностью и емкостью намотки.
В зависимости от конструктивного исполнения различают реостатные преобразователи с поступательным и вращательным перемещением подвижного контакта. Последние, кроме того, делятся на одно- и многооборотные.
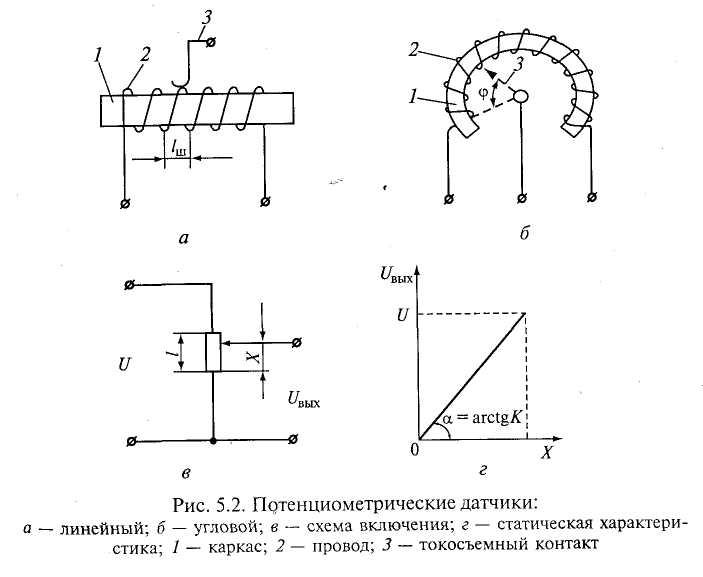
Рисунок 3.2 Потенциометрические датчики:
а- линейный; б- угловой; в- схема включения; г- статическая характеристика;
каркас; 2 – провод; 3- токосъёмный контакт
Подвижный контакт (щетка, движок) выполняют в виде двух-трех параллельных проволочек диаметром 0,1 ...0,2 мм, несколько отличающихся по длине (для прецизионных реостатных преобразователей), или из специально профилированной пластины с разрезами. Ширина контактной поверхности щетки должна быть равна двум-трем диаметрам проволоки чувствительного элемента.
К зажимам обмотки реостата подключается напряжение U постоянного или переменного тока неизменного значения. При перемещении движка выходное напряжение UВЫХ меняется пропорционально входной величине X. Таким образом осуществляется преобразование перемещения в напряжение (рис. 3.2, в). Учитывая, что по конструктивным особенностям R = l, r = X, где R — полное сопротивление преобразователя; l — длина намотки обмотки; r — сопротивление части обмотки, приходящейся на перемещение X движка реостата, функция преобразования будет иметь вид:
![]()
где K — коэффициент преобразования.
Для преобразователя углового перемещения в режиме холостого хода функции преобразования UВЫХ = Kφ, где φ - угол поворота движка от нулевого положения (см. рис. 3.2, б).
Анализ полученных выражений для функций преобразования показывает, что статическая характеристика линейных потенциометров при отсутствии нагрузки представляет собой прямую, проходящую через начало координат под углом α = arctgK (рис. 3.2, г).
Как следует из приведенной статической характеристики, рассмотренные преобразователи относятся к однотактным элементам, т е. они не реагируют на знак входного сигнала. В ряде случаев необходимы преобразователи, учитывающие знак входного сигнала, — двухтактные измерительные преобразователи. Их можно построить на основе однотактных потенциометрических преобразователей, если снимать выходной сигнал с движка и средней точки потенциометра или с диагонали мостовой схемы, образованной двумя потенциометрическими датчиками со средней точкой. Два возможных варианта включения потенциометрических датчиков по двухтактной схеме приведены на рис. 3.3, а, б. Их статические характеристики имеют разную крутизну. Это объясняется тем, что при включении преобразователей по мостовой схеме (см. рис. 3.3, б), изменение входного сигнала отрабатывается двумя движками, смещающимися в разные стороны от средней точки, что приводит к появлению удвоенного выходного напряжения по сравнению со схемой, представленной на рис. 3.3, а.
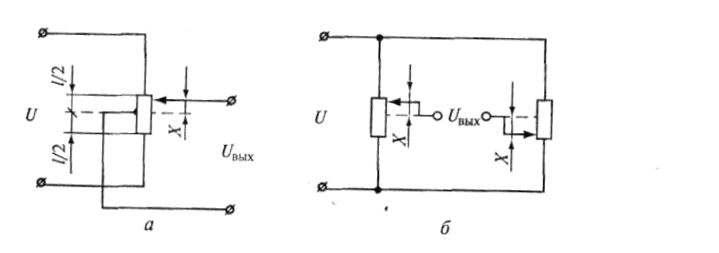
Рисунок 3.3 Варианты включения двухтактных потенциометрических датчиков:
а- с испольэованием средней точки; б- по мостовой схеме
Наряду с линейными преобразователями в системах автоматики и управления широко применяют функциональные преобразователи.
Для получения функциональных реостатных преобразователей используют следующие способы: изменение диаметра провода вдоль намотки; изменение шага намотки; применение каркаса определенной конфигурации; шунтирование участков линейного потенциометра сопротивлениями различных значений. Первые два способа сопряжены с технологическими трудностями и на практике не применяются.
К достоинствам проволочных реостатных преобразователей можно отнести:
простоту конструкции; малые размеры и массу;
возможность получения необходимых функциональных зависимостей относительно простыми средствами;
получение высокоточных линейных статических характеристик;
стабильность характеристик;
малое переходное сопротивление;
возможность работы на переменном и постоянном токе;
малый ТКС.
Недостатками этих элементов следует считать:
наличие скользящего контакта, который может стать причиной отказа из-за окисления контактной дорожки, перетирания витков или отгибания движка;
сравнительно небольшой коэффициент преобразования и высокий порог чувствительности;
наличие шума;
подверженность электроэррозии под действием импульсных разрядов;
ограниченную скорость линейного перемещения или вращения (до 100...200 об/мин) токосъемника вследствие его вибраций при переходе с витка на виток и повышение при этом уровня динамического шума;
ограниченную частоту переменного тока (до 1000 Гц); низкую износоустойчивость.