

3.5. Индуктивные датчики
Принцип действия индуктивных датчиков основан на изменении индуктивности L или взаимоиндуктивности обмотки с сердечником вследствие изменения магнитного сопротивления Rm магнитной цепи датчика, в которую входит сердечник.
Индуктивные датчики относятся к классу параметрических. Измеряемое перемещение на входе датчика вызывает изменение параметров магнитной и электрической цепей, что, в свою очередь, вызывает изменение выходной величины — электрического тока I или напряжения U.
С помощью индуктивных датчиков можно контролировать механические перемещения, силы, температуру, свойства магнитных материалов, определять наличие дефектов, контролировать диаметр стальной проволоки, толщину немагнитных покрытий на стали и др.
Индуктивные датчики отличает ряд достоинств: простота и прочность конструкции, надежность в работе, отсутствие скользящих контактов, большая величина мощности на выходе (до нескольких десятков ватт), высокая чувствительность (до 100 В/мм).

Рисунок 3.7 Схема (а) и характеристика (б) индуктивного преобразователя:
1- сердечник; 2- обмотка; 3- якорь.
К достоинствам рассмотренных индуктивных трансформаторных датчиков следует отнести:
достаточно высокую выходную мощность, позволяющую во многих случаях обойтись без усилительных устройств;
высокие чувствительность и разрешающую способность;
сравнительную простоту конструкции; высокую надежность;
малые массу и размеры при расчете на напряжение повышенной частоты;
невысокую стоимость.
Недостатками рассмотренных измерительных преобразователей являются:
трудность регулировки и компенсации начального напряжения на их выходе;
необходимость экранирования для уменьшения уровня помех, что обусловливает увеличение размеров и массы;
возможность работы только на переменном токе;
ограниченность диапазона линейной статической характеристики.
3.6. Емкостные датчики
П![]() ринцип
действия емкостных измерительных
преобразователей основан на изменении
емкости конденсатора под воздействием
входной преобразуемой величины. Емкость
конденсатора:
ринцип
действия емкостных измерительных
преобразователей основан на изменении
емкости конденсатора под воздействием
входной преобразуемой величины. Емкость
конденсатора:
где ε — относительная диэлектрическая проницаемость диэлектрика;
ε0 — диэлектрическая проницаемость вакуума;
S — площадь пластины;
δ — толщина диэлектрика или расстояние между пластинами.
Емкостные преобразователи используют для измерения угловых и линейных перемещений, линейных размеров, уровня, усилий, влажности, концентрации и др. Конструктивно они могут быть выполнены с плоскопараллельными, цилиндрическими, штыревыми электродами, с диэлектриком между пластинами и без него.
Е![]() мкостный
плоскопараллельный измерительный
преобразователь с изменяемой площадью
перекрытияS
(cм.
рис. 3.8, а)
описывается
уравнением преобразования:
мкостный
плоскопараллельный измерительный
преобразователь с изменяемой площадью
перекрытияS
(cм.
рис. 3.8, а)
описывается
уравнением преобразования:
где а — ширина пластин конденсатора;
X — длина перекрытия электродов.
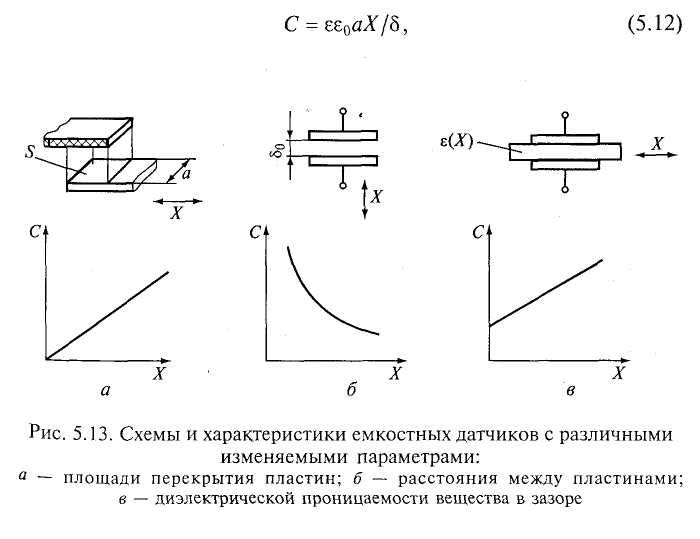
а) б) в)
Рисунок 3.8 Схемы емкостных датчиков с различными измеряемыми параметрами.

Рисунок 3.9 Емкостной датчик для измерения угловых велечин
Емкостные преобразователи перемещения с переменной площадью перекрытия (рис. 3.9) используют и для измерения угловых величин. В этом случае емкость измерительного преобразователя:
![]()
(3.2)
а чувствительность:
![]()
(3.3)
где r2, r1 — соответственно наружный и внутренний радиусы пластин;
φ, φ0 — соответственно текущий (измеряемый) и начальный углы перекрытия пластин.
Е![]() мкостный
плоскопараллельный преобразователь
перемещения с изменяющимся воздушным
зазором(см.
рис. 3.8, б) имеет
нелинейную характеристику. Изменение
его емкости описывается уравнением:
мкостный
плоскопараллельный преобразователь
перемещения с изменяющимся воздушным
зазором(см.
рис. 3.8, б) имеет
нелинейную характеристику. Изменение
его емкости описывается уравнением:
где δ0 — начальный зазор;
X — перемещение пластины.
В связи с нелинейностью статической характеристики такие датчики применяют для измерения относительно малых перемещений, обычно не более 0,1δ0.
Преобразователи с изменяемой диэлектрической проницаемостью среды ε между электродами (см. рис. 3.8, в) широко используют для измерения уровня жидких и сыпучих веществ, анализа состава и концентрации веществ в химической, нефтеперерабатывающей и других областях промышленности, для счета изделий, охранной сигнализации и т.п. Они имеют линейную статическую характеристику.
Емкость измерительных преобразователей в зависимости от конструктивных особенностей колеблется от десятых долей до нескольких тысяч пикофарад, что приводит к необходимости использовать для питания датчиков напряжение повышенной частоты — от 1•103 до 108 Гц. Это один из существенных недостатков подобных преобразователей.
К достоинствам емкостных измерительных преобразователей можно отнести простоту конструкции, малые размеры и массу, высокую чувствительность, большую разрешающую способность при малом уровне входного сигнала, отсутствие подвижных токосъемных контактов, высокое быстродействие, возможность получения необходимого закона преобразования за счет выбора соответствующих конструктивных параметров, отсутствие влияния выходной цепи на измерительную.
Недостатки емкостных измерительных преобразователей состоят в относительно низком уровне выходной мощности сигналов, нестабильности характеристик при изменении параметров окружающей среды, влиянии паразитных емкостей.