

Lek-AAKhTP
.pdfдифференциальные (ПИД-) регуляторы. Дифференциальные регуляторы еще называют регуляторами с предварением.
Дифференциальными регуляторами называются регуляторы, регулирующее воздействие которых содержит составляющую, пропорциональную скорости изменения регулируемой величины. Такие регуляторы целесообразно применять в тех случаях, когда нагрузка объектов регулирования изменяется часто и быстро, а запаздывания велики.
Уравнения регуляторов:
к |
|
Y T |
dY |
- ПД-регулятор |
|||||
|
|
|
|||||||
|
р |
|
д |
|
dt |
|
|
|
|
к |
|
Y |
1 |
t Ydt T |
dY |
- ПИД -регулятор, |
|||
|
|
|
|||||||
|
р |
|
|
Tи o |
д |
dt |
|
||
где Тд -время дифференцирования. Часто используют величину Тп= Тд / Кр , которую называют временем предварения.
Вид передаточных функций регуляторов:
W(p)пд к р (1 Т п р)
W(p)пид к р (Т изТ п р2 Т из р 1)
Т из р
Временные характеристики регуляторов имеют вид:
|
ПД-регулятор |
|
|
0 |
t |
Y |
|
ПИД -регулятор
0 |
t |
Y |
|
0 |
t |
0 |
t |
Рисунок 15.10– Временные характеристики дифференциальных регуляторов
Пунктирные линии на графиках соответствуют временным характеристикам реальных регуляторов. Из графиков видно, что при скачкообразном изменении входного сигнала на выходе регуляторов в начальный момент резко возрастает сигнал, а затем, с течением времени, его величина определяется либо пропорциональной составляющей (для ПДрегулятора), либо пропорциональной и интегральной составляющими (для ПИД-регулятора).
Время предварения - это интервал времени между моментами достижения регулятором одинаковых положений при наличии предварения и
101
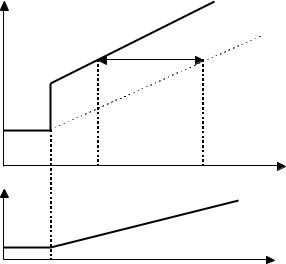
без него. Это хорошо видно из графика реакции ПД-регулятора на линейно нарастающий входной сигнал:
|
|
|
|
Тп |
|
0 |
|
|
t1 |
t2 |
t |
Y |
|
|
0 |
|
t |
Рисунок 15.11 – Динамическая характеристика ПДрегулятора
Наклонная пунктирная линия на графике соответствует П-регулятору, т.е. регулятору без предварения.
В регуляторах может быть прямое и обратное предварение. В регуляторах с обратным предварением дополнительный сигнал по производной вычитается из основного, уменьшая его и как бы увеличивая сигнал отрицательной обратной связи. При таком предварении, чем больше скорость изменения параметра, тем больше расширяются пределы пропорциональности и этим обеспечивается нужное качество регулирования. Когда регулируемый параметр перестает меняться, то пределы пропорциональности сужаются до величины настройки.
Регуляторы с обратным предварением целесообразно применять для малоинерционных объектов, в которых после нанесения воздействия регулируемая величина меняется очень быстро.
16 Виды переходных процессов в системах автоматического регулирования и требования, предъявляемые к ним
При отсутствии внешних возмущающих воздействий и соблюдении материального и энергетического балансов объекта управления автоматическая система находится в состоянии равновесия, а управляемая величина постоянна. Такой режим работы называется установившимся или стационарным.
При наличии внешних возмущений параметры технологического процесса изменяются, переходя от одного установившегося состояния в другое. Такой процесс носит название переходного или неустановившегося.
102
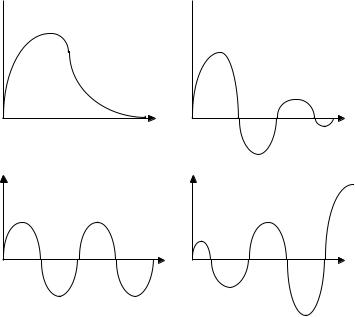
Форма переходного процесса является одним из основных показателей качества управления. Типичные формы переходных процессов в САР, полученные в результате единичных, скачкообразных возмущающих воздействий, показаны на рисунке16.1.
Y Y
Y 
0 |
t |
0 |
t |
а) |
|
|
б) |
Y |
|
Y |
|
0 |
t |
0 |
t |
в) г)
а) - апериодический затухающий, б)- колебательный затухающий, в)- колебательный с постоянной амплитудой колебаний (незатухающий), г)- колебательный расходящийся.
Рисунок 16.1 – Виды переходных процессов в системах автоматического регулирования
Системы автоматического регулирования (САР), в которых возможны только апериодические или колебательные затухающие переходные процессы называются устойчивыми.
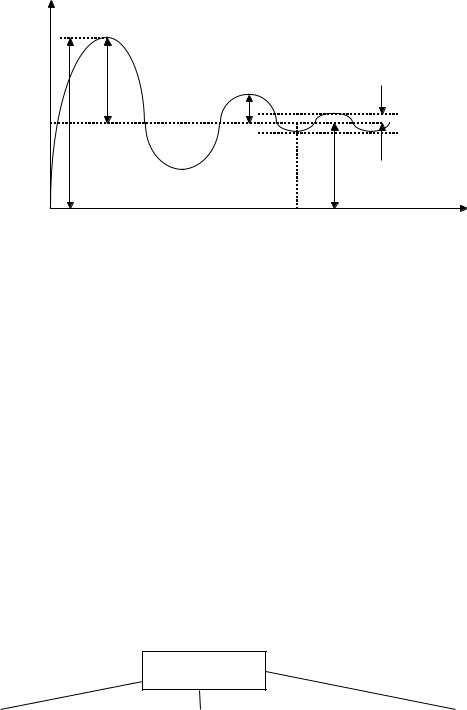
Устойчивость является необходимым, но не единственным требованием, которому должна удовлетворять САР. В нужных пределах еще должны находиться показатели переходного процесса в замкнутой системе. К ним относятся:
- максимальное динамическое отклонение регулируемого параметра Ymax, -остаточное отклонение после окончания переходного процесса Yост,
-время переходного процесса tпп, в течение которого отклонение регулируемого параметра от установившегося значения становится меньше заданной величины Y,
-степень затухания колебательного процесса:
= (Y1 - Y2 )/ Y1 = 0.7-0.8
Для устойчивых САР 0< 1, при чем чем ближе к единице, тем больше запас устойчивости.
Вид типового переходного процесса в САР представлен на рисунке
16.2.
103
Y
Ymax Y1 |
|
|
Y2 |
|
Y |
|
|
Yост |
0 |
tпп |
t |
Рисунок 16.2 – Вид типового переходного процесса в системе автоматического регулирования
17 Промышленные регуляторы
По виду используемой энергии регуляторы могут быть пневматические, гидравлические, электрические и комбинированные.
Электрические регуляторы в свою очередь могут быть классифицированы по виду используемых элементов на: аналоговые и цифровые. Цифровые регуляторы в настоящее время получили название программируемые контроллеры и реализуются на базе микропроцессорной техники.
17.1 Агрегатный пневматический комплекс "СТАРТ"
Комплекс серийно выпускается московским заводом "Тизприбор". В составе комплекса имеются несколько модификаций пневматических регуляторов с разными законами регулирования, вторичных приборов, а также приборов, реализующих простейшие вычислительные функции.
Состав комплекса можно представить рисунком:
СТАРТ
регуляторы |
|
функциональные блоки |
|
вторичные приборы |
|
|
|
|
|
Рисунок 17.1 – Состав агрегатного комплекса «СТАРТ»
В группу регуляторов входят: позиционные регуляторы ПР1.5 и ПР1.6, пропорциональный регулятор ПР2.8, ПИ-регуляторы ПР3.31 и ПР3.32, регуляторы соотношения ПР3.33 и ПР3.34, ПИД-регулятор ПР3.35.
В группу функциональных блоков входят: усилитель мощности ПП1.5, сумматор ПФ1.1, корневой преобразователь ПФ1.17, множительно - делительное устройство ПФ1.18 и др.
104
В группу вторичных приборов входят: показывающий ПВ1.3, самопишущий ПВ4.4, с встроенной станцией управления ПВ10.1 и ПВ10.2, показывающий и сигнализирующий ПКП.1 и др.
Принцип действия приборов основан на компенсации усилий при малых механических перемещениях подвижных деталей (мембранных блоков) в отдельных элементах.
Конструктивно приборы выполняются из отдельных элементов, укрепленных на трехслойной плате из оргстекла. В средней плате выполняются необходимые каналы для соединения элементов.
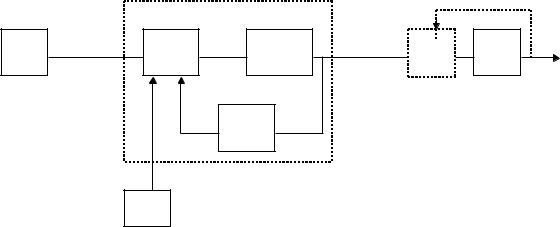
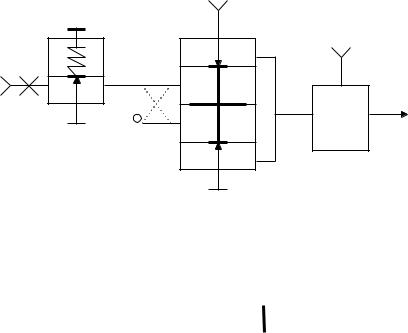
17.1.1 Особенности пневматических регуляторов и их типовая функциональная схема
Главной отличительной особенностью пневматических регуляторов является то, что в качестве носителя сигналов и источника энергии в них используется сжатый воздух.
Пневматический регулятор состоит из первичного преобразователя, задающего и регулирующего устройства, исполнительного механизма и каналов передачи сигналов.
|
РУ |
ПП 0.02-0.1 мП а ЭС |
УС 0.02-0.1 мП а П ОЗ И М к РО |
ОС
0.02-0.1 мП а
ЗД
ПП - первичный преобразователь, РУ - регулирующее устройство, ЭС - элемент сравнения, УС - усилитель, ОС - блок обратной связи, ЗД - задатчик), ПОЗ - позиционер, ИМ - исполнительный механизм. Рисунок 17.2 – Функциональная схема пневматического регулятора
К особенностям регулятора относятся следующее:
1.Для передачи сигналов между блоками регулятора используется унифицированный пневматический сигнал 0.02-0.1 МПа.
2.В качестве задающих устройств применяются редукторы (задатчики). 3.Математические операции, необходимые для воспроизведения стандартных законов регулирования, реализуются аналоговыми методами с помощью пневмоусилителей, охваченных обратной связью.
4.Исполнительные механизмы характеризуются простотой конструкции, низкой стоимостью, достаточно высокой мощностью и быстродействием.
105
5.Линии связи - металлические или пластмассовые трубопроводы длиной до
300м.
6.Исполнительные механизмы, как правило, представляют собой статические (пропорциональные) устройства, поэтому для формирования закона регулирования в пневматических регуляторах обычно не применяется обратная связь с выхода ИМ на вход регулятора.
7.Для усиления мощности сигнала от регулятора к ИМ в состав последнего при необходимости вводится пневмомеханический усилитель ( позиционер) с рычажной обратной связью по перемещению штока регулирующего органа.
17.1.2 Позиционный регулятор ПР1.5
Регулятор ПР1.5 предназначен для двух позиционого регулирования и обеспечивает получение дискретных пневматических сигналов "0" и "1" при повышении или понижении поступающего на вход регулятора давления сжатого воздуха, пропорционального величине регулируемого параметра, когда последний отклоняется от заданного значения. Прибор может быть настроен на получение пневматического сигнала при превышении измеряемым параметром заданного значения (сигнал "на максимум") или при уменьшении величины параметра ниже заданного значения (сигнал "на минимум").
ЗД |
ЭС |
|
|
г |
|
Рзд |
|
|
|
в |
|
Рвх |
УМ |
Рвых |
|
б |
|
|
а |
|
ЗД-задатчик, ЭСэлемент сравнения, УМ - усилитель мощности. Рисунок 17.3 – Принципиальная схема позиционного регулятора ПР1.5
Для элемента сравнения ЭС можно записать:
Рвых = Рпит |
при |
Рзд > Pвх |
Рвых = 0 |
при |
Рзд < Рвх при настройке "на минимум". |
При настройке "на |
минимум" (как показано на рисунке 10.3) входной |
|
сигнал от измерительного блока поступает в камеру Б элемента сравнения, давление от задатчика подается в камеру В. Если входной сигнал больше задания, то верхнее сопло закрыто и Рвых =0. Как только входной сигнал станет меньше заданного, верхнее сопло открывается, и давление Р вых=Рпит подается на вход усилителя мощности и далее на выход регулятора.
106
При настройке "на максимум" давление задания подается в камеру Б, а давление от измерительного преобразователя (Рвх) - в камеру В. Перенастройка регулятора производится поворотом диска, который переключает входные каналы регулятора (пунктир на рисунке 17.3).
17.2 Электрические регуляторы
Электрические регуляторы относятся к двум типам: приборному и аппаратному. К регуляторам приборного типа относятся специальные устройства для позиционного или пропорционального регулирования, встраиваемые в измерительные приборы и не имеющие самостоятельной измерительной цепи. Аппаратный тип регулятора представляет самостоятельное изделие, имеющее свою измерительную цепь.
Электрическим регуляторам присущи некоторые особенности:
1. Электрические методы позволяют измерить большинство технологических параметров. Так электрический сигнал на выходе имеют первичные преобразователи (датчики), применяемые для измерения температуры, давления, концентрации вещества, уровня и т.д. Поэтому в электрических регуляторах с помощью сравнительно простых устройств обеспечивается связь выхода первичного преобразователя с входом регулятора.
2. Электрический привод обладает рядом положительных свойств. Так, при отсутствии сигнала на входе или исчезновении питания исполнительный механизм останавливается, при чем положение регулирующего органа с течением времени не будет изменяться (используются самотормозящие редукторы).
3Передача сигналов на расстояние в электрических системах осуществляется наиболее просто, поэтому установка в различных местах ИМ, задатчика, регулирующего устройства, ключей дистанционного управления не вызывает особенных затруднений.
17.2.1 Позиционный регулятор, встраиваемый в приборы типа КС2
Позиционный |
регулятор, встраиваемый в приборы |
типа КС2 |
|||
(автоматические |
мосты |
КСМ, |
потенциометры |
КСП, |
приборы |
дифференциально-трансформаторной системы КСД) представляет собой два микропереключателя «М» и «Б», устанавливаемых на реохордном блоке прибора, и группу исполнительных реле К1-К3, устанавливаемых внутри корпуса прибора (смотри рисунок 18.1).
Положение микропереключателей может изменяться путем их перемещения вдоль шкалы прибора. Состояние переключателей изменяется под воздействием движущейся каретки измерительного прибора, при его работе.
На рисунке 17.4 представлена схема трех позиционного регулирования температуры в электрической печи с помощью электрических
107
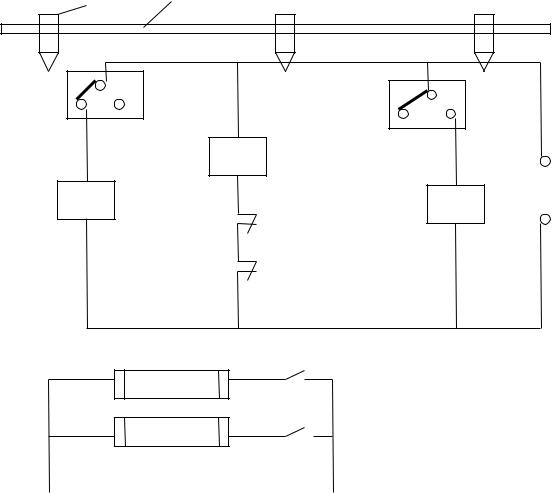
нагревательных элементов НЭ1 и НЭ2, соответственно малой и большой мощности.
М 1 2 Н Б
"М" |
"Б" |
|
К2 |
|
Uпит |
К1 |
К3 |
|
К1 |
|
К3 |
К2
НЭ1
К1
НЭ2
О |
Ф |
1- каретка измерительного прибора, 2- направляющая каретки, "М", "Б" - микропереключатели ("М"- меньше,"Б"-больше).
Рисунок 17.4 – Схема трехпозиционного регулирования температуры с помощью электрических нагревателей
Каретка прибора может занимать три положения: М – когда значение температуры меньше заданной, Н- когда значение температуры находится в норме, Б- когда значение температуры больше нормы.
В положении М получает питание реле К, которое своим контактом К1 подает электрическое питание на нагреватель НЭ2. Происходит быстрый подъем температуры в печи, каретка прибора смещается вправо и занимает положение Н («норма»). Получает питание релеК2 , которое своим контактом К2 включает нагреватель меньшей мощности НЭ1, при этом нагреватель НЭ2 отключается. Вследствие инерционности печи, как объекта управления, температура будет повышаться, но с меньшей скоростью. Когда она превысит допустимую верхнюю границу , каретка займет положение Б. При этом реле К3 получает питание а реле К2 обесточивается. В этом положении
108
каретки оба нагревателя отключаются от питающей сети. Температура в печи начнет уменьшаться, а каретка прибора будет двигаться влево. При входе ее в зону Н (нормы) вновь срабатывает реле К2 и включается нагреватель малой мощности НЭ1. Скорость падения температуры замедляется. При выходе каретки в зону М (температура меньше нижнего допустимого значения) вновь включится нагреватель большой мощности НЭ2, а нагреватель НЭ1 отключится. Далее рассмотренный процесс управления будет повторяться.
17.2.2Электрические агрегатные комплексы автоматического регулирования
Кэлектрическим агрегатным комплексам регулирования относятся разработанные в разное время комплексы:
1. |
КОНТУР |
и |
КОНТУР-2. (На базе приборов Р25 ,Р29). |
|
2. |
КАСКАД |
и |
КАСКАД-2. |
|
3. |
АКЭСР и АКЭСР-2(Агрегатный комплекс электрических |
средств |
||
регулирования первой и второй очереди).
17.2.3 Функциональный состав комплексов КАСКАД , АКЭСР
Комплексы состоят из различных регулирующих и функциональных устройств, предназначенных для преобразования сигналов, поступающих от первичных преобразователей, а также для формирования команд управления исполнительными механизмами.
Взаимосвязь блоков, входящих в комплексы можно иллюстрировать следующей схемой, представленной на рисунке 17.5.
|
|
+24 В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0- :-5 мА |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Регулирующие |
Релейные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналоговые |
|
|||||||||||
устройства |
блоки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
блоки |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Блоки оператив- |
|
Блоки |
|
|
|
|
|
Задатчики |
|
|
|
|
|
|
|
|
|
Блоки |
|
|||||||||||
ного управления |
|
управления |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
управления |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Функциональные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
блоки |
|
Измер. |
|
Алгебр. |
|
|
Логич. |
|
Нелин. |
|
Дифферен. |
|
|
Усил. |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Первичные |
|
|
|
0-:-5 мА |
|
|
|
|
0 -:- 10 мГн |
|
|
|
термопары, |
|
|
|
|
|
||||||||||||
преобразователи |
|
|
|
0 -:-20 мА |
|
|
|
|
|
0 -:- 2 В |
|
|
|
термометры |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сопротивления |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Рисунок 17.5 - Структура комплексов КАСКАД и АКЭСР |
|
|
|
|
|
|||||||||||||||||||||||||
109
Где "Измер." - измерительные блоки, "Алгебр." - алгебраические блоки, "Логич."- логические блоки, "Нелин." - блоки нелинейных преобразований, "Дифферен."- дифференцирующие, интегрирующие блоки, "Усил."- усилители.
Регулирующие и функциональные блоки позволяют:
-Реализовать различные законы регулирования.
-Осуществлять ввод и вывод информации для оператора, логических устройств, ЭВМ.
-Формировать динамические и логические связи между контурами управления.
-Выполнять различные преобразования аналоговой информации
(демпфирование, дифференцирование, интегрирование, умножение и т.д.). Методом агрегатирования устройств комплексов могут быть построены
разнообразные схемы регулирования и управления технологическими процессами. При этом из устройств комплексов могут быть скомплектованы как простейшие сигнализаторы, так и сложные многоуровневые АСУТП с развитыми вычислительными и логическими функциями.
Автоматизированные системы на базе комплексов могут функционировать как самостоятельно, так и взаимодействовать с выше и параллельно стоящими системами управления, построенными на базе других агрегатных комплексов.
Все устройства комплексов построены по модульному принципу, на базе интегральных микросхем. Исключением является комплекс КАСКАД. Историческая последовательность появления комплексов: КАСКАД, КАСКАД-2, АКЭСР-1, АКЭСР-2.
Основное различие между комплексами заключается в расширении функциональных возможностей отдельных устройств, входящих в комплексы, в направлении от КАСКАД к АКЭСР-2.
Таблица 17.1 - Типы регулирующих блоков, входящих в комплексы
Функции |
|
КАСКАД |
КАСКАД-2 |
АКЭСР-1 |
АКЭСР-2 |
регулирование |
|
|
|
|
|
аналог.блок |
|
Р12 |
Р17 |
РБА |
РБА |
релейный блок |
Р21 |
Р27 |
РБИ |
РП4(у,т,п) |
|
блоки управлен. |
БУ12, БУ21 |
БУ12, БУ21 |
БРУ22,БРУ32 |
БРУ22, БРУ32 |
|
Примечание: |
|
РП4-У предназначен для работы с токовыми датчиками. |
|||
РП4-Т - с двумя термометрами сопротивления и одной термопарой. |
|||||
РП4-П- |
с |
дифференциально-трансформаторными, |
индуктивными, |
||
реостатными и |
ферродинамическими датчиками. |
|
|||
110