

Lek-AAKhTP
.pdf17.2.4 Регулирующий блок аналоговый РБА
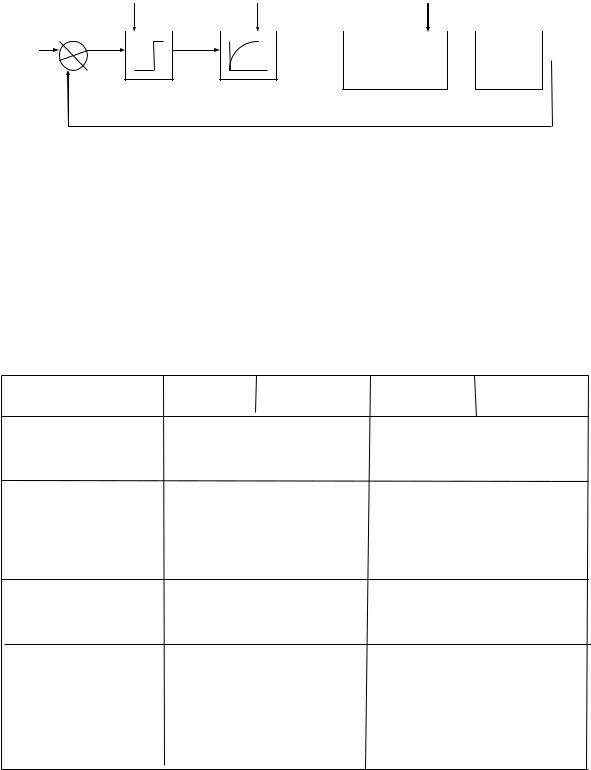
Блок обеспечивает формирование сигнала рассогласования и его динамическое преобразование в выходной аналоговый сигнал в соответствии с П, ПИ, ПД, ПИД законами регулирования с ограничением выходного сигнала по верхнему или нижнему уровню. Блок имеет кондуктивное разделение входных и выходных цепей и обеспечивает безударное переключение с режима ручного управления на автоматический и обратно.
Блок имеет пять входов по напряжению и два по току; имеет выход как по напряжению, так и по току.
x11 x12 x13 |
|
x21 x22 x23 |
x24 |
|
|
|
|
1 |
|
2 |
|
y1 |
|
|
y2 |
|
+ |
- |
|
|
3 |
|
|
|
ye |
|
|
|
xпд |
xи |
|
РБА |
yI |
yU |
|
Рисунок 17.6 – Блок регулирующий аналоговый РБА
17.2.5 Регулирующий блок импульсный РБИ
Предназначен для формирования ПИ- и ПИД - законов регулирования. Выпускались три разновидности блока, отличающихся видами дистанционной подстройки динамических параметров - скорости связи Vсв и постоянной времени интегрирования Ти.
РБИ1 - не имеет дистанционной подстройки параметров.
111
РБИ2 - обеспечивает дискретную дистанционную подстройку Vсв и Ти ( три ступени).
РБИ3 -обеспечивает дистанционную аналоговую подстройку параметров. Применение РБИ2 и РБИ3 позволяет создавать системы с автоматической настройкой параметров (адаптивные системы), которые автоматически приспосабливаются к изменениям характеристик объекта
управления.
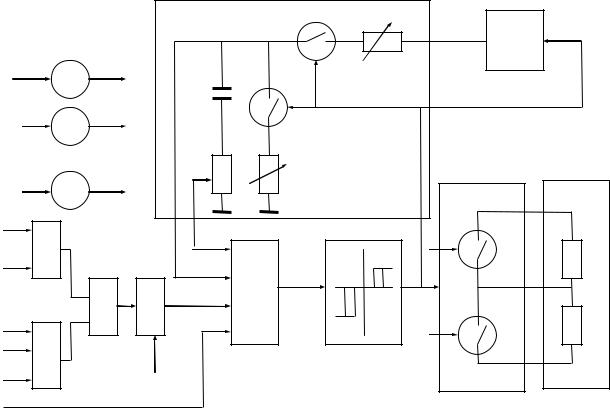
На рисунке 17.7 представлена расширенная функциональная схема РБИ1, а на рисунке 17.8 –диаграммы поясняющие работу РБИ.
|
|
|
ФОС |
Б,М |
Vсв |
|
БМ1 |
|
|
|
|
x1 |
1 |
y1 |
Cос |
О |
|
|
БМ2 |
|
|
|
|
x2 |
2 |
y2 |
|
|
|
|
БМ3 |
|
tи |
Ти |
|
x3 |
3 |
y3 |
|
|
|
x11 |
|
|
|
|
|
|
|
|
+ |
|
|
x12 |
1 |
|
_ |
|
РЭ |
|
+ |
|
|
|
|
|
3 |
Ф |
+ |
4 |
|
x21 |
- |
|
|
|
|
x22 |
2 |
Тф |
|
|
|
x23 |
|
|
|
|
н |
x31 |
|
|
|
|
|
Uзар ФН
УМ |
ПУ |
М |
Zм |
Б |
Zб |
БМ1-БМ3 - блоки масштабирования, 1- 4-сумматоры, Ф-демпфер, РЭрелейный элемент, УМ -усилитель мощности, ПУ -пусковое устройство, ФОС функциональная обратная связь, ФН -формирователь напряжения для обратной связи.
Рисунок 17.7– Функциональная схема блока регулирующего импульсного (РБИ)
Сумматор 1 используется для ввода сигнала регулируемой величины. Сумматор 2 -для ввода задания, сумматор 3 для формирования сигнала рассогласования. Сумматоры выполнены на ОУ К153УД1А.
112
Демпфер ( фильтр) Ф является фильтром сигнала рассогласования и представляет апериодическое звено (RC) с регулируемой постоянной
времени Тф .
Сумматор 4 реализован на высокоомном ОУ К284УД1В с дифференциальным входом на полевых транзисторах.
РЭ реализует характеристику трехпозиционного реле с зоной нечувствительности н (выполнен на ОУ К153УД1А).
Усилитель мощности УМ предназначен для обеспечения достаточной нагрузочной способности выходных цепей регулирующего блока и гальванической развязки их от входных цепей. Усилитель содержит два транзисторных ключа, управляющих двумя оптоэлектронными преобразователями (тиристорные оптроны). На схеме эти узлы показаны условно как ключи М (меньше) и Б (больше). Оптроны обеспечивают коммутацию внешних цепей (пускового устройства) с источником переменного или пульсирующего до нуля тока, а также гальваническое разделение управляющих и силовых цепей.
|
U=Uвх-Uзд (рассогласование) |
|
|
Uсум= U-Uос |
|
0 |
зона |
t |
нечувствительности
Uос
Uим
0 |
t |
Твкл |
Т |
|
tи |
( ) |
|
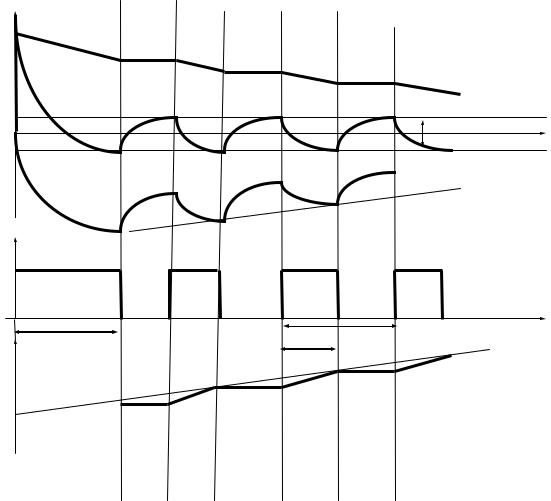
0  t Uос-напряжение обратной связи, Uим- выходной сигнал пускового устройства (ПУ), tи -длительность импульса, Т -период следования импульсов, Твкл - длительность первого включения ПУ, ( ) -угол поворота двигателя (регулирующее воздействие).
t Uос-напряжение обратной связи, Uим- выходной сигнал пускового устройства (ПУ), tи -длительность импульса, Т -период следования импульсов, Твкл - длительность первого включения ПУ, ( ) -угол поворота двигателя (регулирующее воздействие).
Рисунок 17.8 - Диаграммы работы РБИ
113
ФОС - представляет собой апериодическое звено с разделенными цепями заряда и разряда. При срабатывании релейного элемента в любую сторону (М или Б) замыкается ключ "Б,М" и конденсатор Сос заряжается через сопротивление Vсв под действием напряжения Uзар. Если же релейный элемент переходит в невозбужденное состояние "0", то замыкается ключ разряда "О" , и конденсатор разряжается через сопротивление Ти.
Коэффициент усиления ПИ-регулятора определяется как:
Кр = Sим / Vсв
где S им -скорость исполнительного механизма , Vсв -скорость связи. Постоянная времени интегрирования Ти = RТи Сос.
В результате разделения цепей заряда и разряда установка параметров Кр и Ти производится независимо.
Для уменьшения требуемого зарядного сопротивления Vсв заряд Сос производится не постоянным током, а последовательностью импульсов частотой 50 Гц, которые вырабатываются формирователем напряжения ФН.
Длительность управляющих импульсов tи может регулироваться для обеспечения приемлемого эксплуатационного режима регулирующего блока и исполнительного механизма с помощью сопротивления tи , напряжение с которого подается на сумматор 4 в качестве сигнала положительной обратной связи и влияет на порог отключения релейного элемента. При слишком коротких и частых управляющих импульсах ИМ не успевает отработать командный сигнал и может быстро выйти из строя, а слишком большое значение tи может привести к возникновению переброски - частых периодических переключений релейного элемента от одного направления к другому ("меньше "- "больше").
17.3 Цифровые (микропроцессорные) регуляторы
Бурное развитие микропроцессорной техники в последние годы вызвало появление целого ряда цифровых (микропроцессорных) регуляторов. Примером могут служить МИНИТЕРМ, ПРОТАР (Московский завод тепловой автоматики МЗТА), МЕТАКОН (НПФ КонтрАвт Нижний Новгород), ТРМ 151 (Овен) , МИКРОЛ и др.
Регуляторы выпускаются как одноканальными так малоканальными (до трех каналов управления), они могут осуществлять как позиционный так ПИД законы регулирования. Выходной сигнал регуляторов может иметь как аналоговую так и импульсную форму. Матобеспечение регуляторов позволяет автоматически устанавливать оптимальные параметры настройки ПИДрегулятора, формировать и запоминать несколько рабочих программ пользователя.
Регуляторы имеют интерфейсный канал связи (R 232C, RS485).
114
17.3.1Регулятор МИНИТЕРМ
Разработан Московским заводом тепловой автоматики (МЗТА). Имеет модификации:
300.3 -для работы с различными термопарами, подключаемыми через коробку холодных спаев; 300.2 - для работы с одним (двумя) термометрами сопротивления различных
градуировок (100 М, 50 П, 50 М); 300.0 - для работы с токовыми датчиками (до 5 штук).
В регуляторе реализуется ПИД алгоритм регулирования, имеется автонастройка динамических характеристик. Все модели имеют импульсный и аналоговый выходы, программный задатчик, датчик положения исполнительного механизма, интерфейсный канал связи RS 232C.
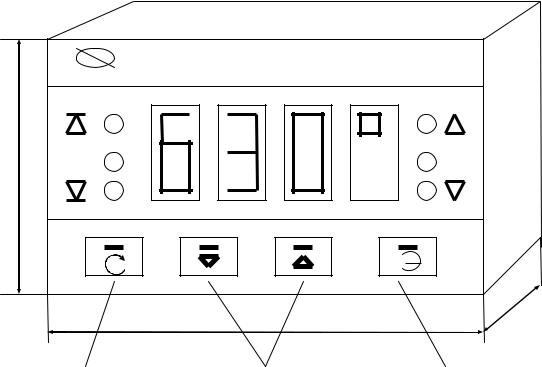
Регуляторы выполняются в конструктиве DIN 96*96 (1/4 DIN),48*96 (1/8 DIN ), 48*48 (1/16 DIN )(смотри рисунок 17.9).
М И Н И Т Е Р М 300 |
|
|
48 |
|
|
|
|
160 |
|
96 |
|
режимы изменения |
изменяют величины |
переход в режим |
задания и индикации |
задания или выход |
ручного управления |
|
регулятора при ручном |
|
|
управлении |
|
Рисунок 17.9 – Внешний вид регулятора МИНИТЕРМ |
||
Для просмотра некоторых параметров регулятора или настройки используется одновременное нажатие нескольких кнопок.
При выполнении операции преобразования сигналов от термопар и термометров сопротивления осуществляется линеаризация сигналов с учетом градуировок датчиков и температуры холодных спаев.
115
|
|
|
|
|
вх. АЦП ПР1 |
выкл |
|
|
|
|
|
ПИД |
|
Z1 |
|
вк |
|
ШИМ |
0-:24 В |
|
|
|
|
Z2 |
|
автонастройка |
|
|
|
ПР2 |
|
|
|
|
|
|
|
интегратор |
|
ограничение |
|
|
|
|
|
|
|
|
0-:-10В |
|
|
|
ЦАП |
Y1 |
|
|
регулируемый |
|
|
стоп |
|
|
|
|
сброс ПГЗ |
|
|
|
|
|
рассогласование |
|
0-:-5 мА |
|
|
|
|
U/I |
Y2 |
|
|
|
|
Z3 |
установка задания |
|
|
|
|
|
|
|
|
Z4 |
|
|
|
диагностика |
|
|
|
Z0 |
|
|
|
|
|
|
||
|
|
|
отказов |
|
|
|
|
24 В |
питание |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|||||
|
|
|
|
|
|||
|
|
интерфейс |
|
|
R 232 C |
||
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
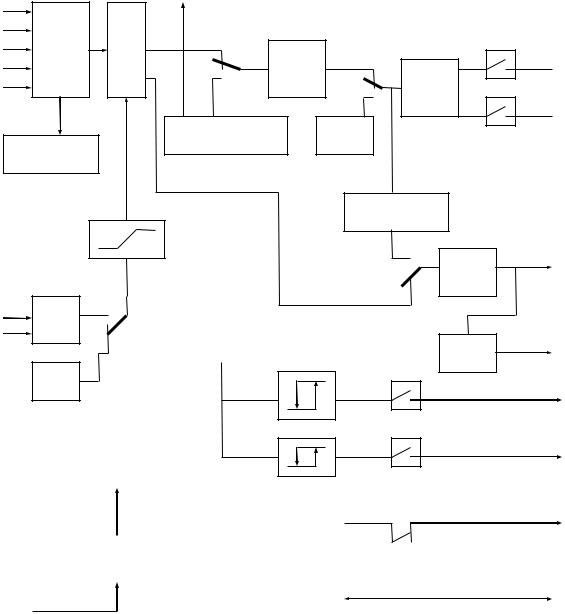
Рисунок 17.10 - Функциональная схема |
|
МИНИТЕРМ-300 |
||||
АЦП – аналого-цифровой преобразователь.
ПР1 - блок преобразования входного сигнала и формирования сигнала рассогласования. ПР2 - блок преобразования сигнала от датчика положения ИМ. ПГЗ - программный задатчик. ШИМ- широтно-импульсный модулятор. ПИДпрограммно реализуемый регулятор.
Блок диагностики анализирует неисправности регулятора, а также дает сигнал обрыва датчика.
Выходные сигналы формируются:
- пятью "сухими" транзисторными ключами Z1-Z0 ( U=0-:-24 B, I 0.15 A).
-цифроаналоговым преобразователем ЦАП (U=0-:-10 B),
-преобразователем напряжение-ток U/I ( I=0-:-5 мА).
116
Задание может устанавливаться вручную кнопками либо от программного задатчика, который может управляться по дискретным входам "стоп" и "сброс" дистанционно.
Блок "автонастройка" позволяет автоматически устанавливать оптимальные параметры настройки (Кр ,Ти ,Тд ) ПИД регулятора. Для этого в режиме настройки сигнал рассогласования подается на регулятор через релейный элемент и фазосдвигающий фильтр (апериодическое звено ).
|
|
D |
|
Тф |
|
Кр,Ти,Тд |
|||
Yзд |
|
Z |
|
|
|
|
|
Y |
|
|
|
|
|
||||||
 Регулятор
Регулятор  Объект
Объект 
Y
Рисунок 17.11 – Структура системы регулирования в режиме «автонастройки»
(Методика расчета оптимальных значений настроек регулятора изложена в журнале "Теплоэнергетика" Реализация функции автоматизированной настройки в микропроцессорном контроллере ПРОТАР. Ротач В.Я.,Кузищин В.Ф.,Лысенко С.Б.)
Усиление выходных сигналов МИНИТЕРМа осуществляется тиристорными усилителями.
Таблица 17.2 - Типы усилителей |
|
|
|
|
||
характеристика |
У300 |
|
У24 |
У13Н |
|
У13Д |
входной управ- |
"сухие ключи" |
( 0-:-5)мА ,(0-:-10) В |
||||
ляющий сигнал |
U 45 B; |
I 0,15 A |
|
|
|
|
параметры управ- |
220 В |
|
220/380 В |
220В,50Гц |
|
=220 В |
|
|
|||||
ляемой нагрузки |
50 Гц |
|
50 Гц |
3 кВт |
|
1,1 кВт |
|
0,5 кВт |
1,1 кВт |
380В, 5,7кВт |
|
|
|
габариты |
190*60*165 |
|
два блока |
190*60*165 |
||
|
|
|
190*60*165 |
|
|
|
исполнительный |
реверсивн |
|
реверсивн. |
электронаг- |
|
двигатель |
|
|
|||||
механизм |
однофазн. |
|
трехфазн. |
реватель |
|
постоян. |
|
асинхрон. |
|
асинхрон. |
|
|
тока |
|
двигатель |
|
двигатель |
|
|
|
117
Во всех усилителях имеется встроенный источник питания регуляторов "МИНТЕРМ". Усилители обеспечивают гальваническое разделение выходных цепей.
17.4 Программируемые контроллеры
Для развития систем автоматического регулирования в настоящее время характерно широкое применение распределенных систем управления, одним из
основных |
компонентов |
которых |
являются |
микропроцессорные |
программируемые контроллеры МПК. |
|
|
||
МПК |
представляет |
собой |
специализированную управляющую |
|
микроЭВМ, работающую в реальном времени по некоторым фиксированным рабочим программам, размещаемым в ПЗУ.
Распределенные АСУТП на базе МПК обладают повышенной надежностью, быстродействием, качеством регулирования и гибкостью применения.
Различают МПК трех типов:
1. МПК, ориентированные на реализацию алгоритмов автоматического регулирования непрерывных технологических процесов и предназначенные для замены аналоговых и цифровых регуляторов. Такие МПК (по классификации предложенной НИИТЕПЛОПРИБОРом) получили название РЕМИКОНТЫ (регулирующие микропроцессорные контроллеры).
2. МПК, ориентированные на реализацию алгоритмов логического типа и предназначенные для замены различных релейных и логических схем электроавтоматики и команд-аппаратов. Такие МПК используются, в основном, для управления периодическими процессами и получили название ЛОМИКОНТЫ (логические микропроцессорные контроллеры).
3. МПК, |
ориентированные |
на реализацию специальных |
алгоритмов |
управления |
и обработки информации, и предназначены для |
управления |
|
сложными агрегатами, механизмами, аналитическими комплексами.
По числу каналов управления все МПК предложено делить на три класса: Большие - с числом каналов управления > 100.
Средние - с числом каналов управления от 10 до 100. Малые - с числом каналов управления до 10.
Следует заметить, что приведенные классификации МПК довольно условны. В настоящее время имеется тенденция к совмещению функций логических и регулирующих контроллеров в одном типе. Примером может служить ремиконт Р130, который выпускается в 30 модификациях, различающихся назначением и число входов-выходов.
118
17.4.1 Обобщенная структурная схема МПК
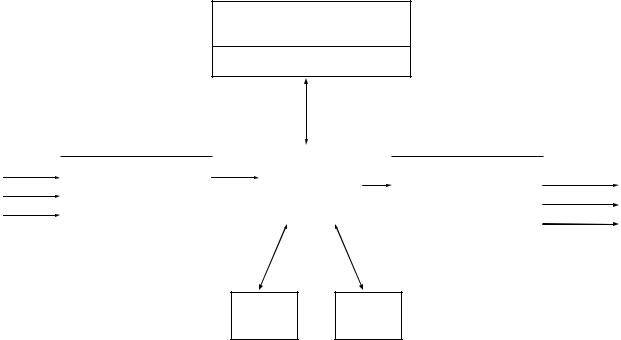
Обобщенную структурную схему МПК можно представить в виде, представленном на рисунке 17.12.
ЗУ -запоминающее устройство (память), ОЗУ -оперативное ЗУ, ПЗУ - постоянное запоминающее устройство, ППЗУ -перепрограммируемое ЗУ. МП - микропроцессор. УСО - устройство связи с объектом. СУ - согласующее устройство. АЦП - аналого-цифровой преобразователь, ДЦП -дискретно- цифровой преобразователь, ЦАП -цифроаналоговый преобразователь, ЦДП - цифродискретный преобразователь. УИ - устройство индикации. ПУ - пульт управления ( пульт оператора).
Технические требования к МПК зависят от необходимого объема и характера информации, подлежащей обработке на данном объекте управления. Для оборудования периодического действия характерно программное управление в виде приема, переработки и выдачи дискретных команд. При этом сигналы и алгоритмы управления формируются преимущественно в классе логических или булевых функций, необходимы также и аналоговые каналы управления, но число их значительно меньше, чем дискретных.
ЗУ
ОЗУ  ПЗУ
ПЗУ  ППЗУ
ППЗУ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
входы |
|
|
УСО |
|
|
|
|
УСО |
выходы |
|||||
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
АЦП |
|
|
МП |
|
|
ЦАП |
|
|
|
|
|
|
СУ |
|
|
|
|
|
|
СУ |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
ДЦП |
|
|
|
|
|
ЦДП |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УИ ПУ
Рисунок 17.12 – Структурная схема программируемого контроллера
Для оборудования непрерывного действия требуются преимущественно аналоговые каналы управления.
Этими особенностями объектов управления обусловлены необходимый набор УСО и характер программного обеспечения.
При использовании МПК в системах автоматизации необходимо обеспечить их работоспособность и надежность. Для этого необходимо:
119
- Обеспечить помехоустойчивость от помех по входным цепям и питающей электросети. Причинами помех являются сильные электромагнитные поля, искажение характеристик питающей электросети. Помехозащищенность обеспечивается гальваническими развязками, соответствующими фильтрами в УСО и блоках питания.
- Обеспечить работоспособность МПК при сбоях напряжения питания. Особенно это относится к ЗУ. При сбоях питания в ЗУ не должна искажаться хранимая информация. Обеспечивается работоспособность использованием ПЗУ, ППЗУ, подпитывают ОЗУ независимым источником питания, используют дублирование блоков.
-Обеспечить устойчивость и надежность реализуемых алгоритмов по отношению к помехам в управляемом технологическом процессе, например, используя алгоритмы сглаживания входных сигналов и т.п.
-Обеспечить самодиагностику, позволяющую быстро находить и локализовать неисправность.
-Обеспечить надежность работы при отказе МПК. Для этого вводится
"горячее" резервирование - параллельно работающий второй МПК, который берет на себя управление при отказе основного МПК.
Семейство микропроцессорных контроллеров может быть представлено такими МПК как: Ремиконт 100, 110, 120, 130 , Ломиконт 110, 120, Униконт,
Эмиконт, Техноконт (MFC ,TCM), С100,С200,С300.
17.7.2 Ремиконт 130
Многие потребители нуждаются в малогабаритном малоканальном контроллере, который в регулирующем варианте управлял бы 1-4 контурами , а в логическом -задачей с 10-30 входами-выходами. Аналогичные устройства требуются и для автоматизации крупных объектов, имеющих особо ответственные контуры регулирования и управления. При отказе малоканального контроллера " площадь поражения" оказывается минимальной.
Р130 в равной мере эффективно решает задачи автоматического регулирования и логического управления ( выпускаются модели для решения задач регулирования и для логического управления).
Р-130 рассчитан на щитовой утопленный и навесной монтаж. На лицевой панели контроллеров расположены органы оперативного управления, контроля и индикации.
Структурная схема контроллера представлена на рисунке 17.13.
120