

Lek-AAKhTP
.pdfС |
С |
при изменении Т
ТР
|
при изменении Р |
Т,Р |
время |
статическая характеристика |
динамическая характеристика |
Рисунок 2.2 Статическая и динамическая характеристики ТОУ
После выбора критерия управления и каналов воздействия на него приступают к анализу ТОУ с точки зрения возможных возмущений и путей их ликвидации до поступления в объект. При этом особое внимание обращают на стабилизацию входных параметров, т.к. с их изменением в объект поступают наиболее сильные возмущения.
Как правило, все возмущения не удается ликвидировать до поступления в объект. Особо трудно предусмотреть и устранить внутренние возмущения. Поскольку все возмущения не могут быть ликвидированы, они приводят к изменению режимных параметров, а затем и критерия управления. Появляется необходимость регулирования режимных параметров.
В конечном итоге приходят к созданию комбинированной системы управления, осуществляющей регулирование критерия управления, режимных и входных параметров.
2.6.2 Выбор контролируемых величин
Контролю подлежат параметры, по значениям которых осуществляется оперативное управление технологическим процессом. К таким параметрам относятся все режимные и выходные параметры, а также входные параметры, при изменении которых в объект будут поступать возмущения.
Обязательному контролю подлежат параметры, значения которых регламентируются технологической картой.
2.6.3.Выбор сигнализируемых величин
Квыбору приступают после анализа ТОУ в отношении его взрыво- и пожароопасности, токсичности и агрессивности перерабатываемых веществ,
возможных аварий и несчастных случаев.
11
Предаварийной (а при необходимости предупредительной) сигнализации подлежат параметры, предельные значения которых могут привести к: взрыву и пожару, несчастным случаям, аварии, выходу из строя оборудования, существенному нарушению технологического режима, выпуску некондиционной продукции и браку.
Сигнализации подлежит факт изменения количественных и качественных характеристик целевых продуктов, не предусмотренная технологическим регламентом остановка отдельных агрегатов.
2.6.4 Выбор параметров и способов защиты
Оперативный персонал при его оповещении устройствами сигнализации о нежелательных событиях должен принять соответствующие меры по их ликвидации. Если эти меры окажутся неэффективными и параметр достигнет аварийного значения, должны сработать системы противоаварийной защиты (ПАЗ), которые автоматически по заданной программе перераспределяют материальные или энергетические потоки, включают и отключают аппараты объекта с целью предотвращения взрыва, аварии, несчастного случая и т.д.
Возврат ТОУ в рабочее состояние после срабатывания ПАЗ осуществляется технологическим персоналом.
Комплекс реализуемых способов защиты разрабатывают, исходя из особенностей ТОУ, анализа аварийных ситуаций и категории взрывоопасности ТОУ. В случае отключения питания система ПАЗ должна обеспечить перевод ТОУ в безопасное состояние.
3 Структуры локальных систем автоматического регулирования (САР)
Один из этапов проектирования систем регулирования - выбор структуры системы и расчет (выбор) оптимальных параметров регуляторов. И структура системы и тип регулятора (а также его параметры) определяются свойствами технологического процесса как объекта регулирования.
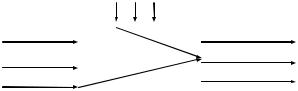
В общем случае любой технологический процесс характеризуется следующими основными группами переменных (смотри рисунок 3.1).
|
Wв(р) |
Y |
|
Wр(р) |
|
Рисунок 3.1 – Группы переменных, характеризующих состояние ТОУ |
||
1. Переменные, характеризующие состояние процесса (вектор Y). Вектор Y |
||
называют вектором регулируемых величин. |
|
|
12
2.Переменные, изменением которых система регулирования может воздействовать на объект с целью управления (вектор ). Вектор называют вектором регулирующих воздействий.
3.Переменные, изменения которых не связаны с воздействием системы
регулирования. Эти изменения отражают влияние на регулируемый объект внешних условий, изменение характеристик самого объекта (вектор ). Вектор называют вектором возмущающих воздействий.
Анализ технологического процесса, как объекта регулирования, предполагает оценку его статических и динамических свойств по каждому из каналов от любого возможного управляющего воздействия к любому возможному регулируемому параметру, а также по каналам возмущение - регулируемый параметр.
В результате анализа либо удается выделить контуры регулирования для каждой из регулируемых величин, т.е. определить с помощью какого регулирующего воздействия следует управлять тем или иным регулируемым параметром, либо однозначной зависимости установить не удается. В первом случае мы будем иметь дело с наиболее простым вариантом структурной схемы автоматического регулирования - совокупностью одноконтурных систем регулирования.
3.1 Одноконтурная САР
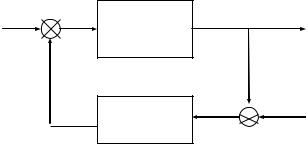
На рисунке 3.2 приведена структурная схема одноконтурной системы автоматического регулирования.
|
Wоб(p) |
Y |
|
|
|
объект
Yo
Wp(p)
Рисунок 3.2 - Структурная схема одноконтурной САР
Схема состоит из объекта и регулятора. При этом все звенья, определяющие динамические свойства чувствительных элементов, измерительных устройств, исполнительных устройств и линии связи относят обычно к объекту. Yо -задающее воздействие, -возмущающее воздействие.
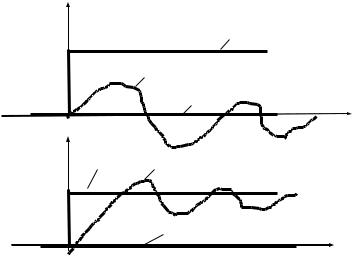
Изменение Yo и приводит к изменению Y - регулируемой величины. Виды переходных процессов при изменении Yo и представлены на рисунке 3.3.
13
,Y,Yo |
|
Y
Yo
t
,Y,Yo
Yo Y
t
Рисунок 3.3 – Виды переходных процессов в одноконтурной САР
3.2 Многоконтурные САР
Удовлетворительное качество регулирования в простейшей одноконтурной системе с использованием стандартных законов регулирования можно обеспечить лишь при благоприятных динамических характеристиках объекта. Однако большинству технологических объектов свойственны значительное чистое запаздывание и большие постоянные времени. В таких случаях даже при оптимальных настройках регуляторов одноконтурные САР характеризуются большими динамическими ошибками, длительностью переходного процесса.
Для повышения качества регулирования необходим переход от одноконтурных САР к более сложным системам, использующим дополнительные (корректирующие) импульсы по возмущениям или вспомогательным выходным координатам. Такие системы содержат кроме обычного регулятора дополнительные регуляторы.
В зависимости от характера корректирующего импульса (дополнительного регулирующего воздействия) различают следующие многоконтурные САР:
-Комбинированные - сочетающие обычный замкнутый контур регулирования (регулирование по отклонению) с дополнительным каналом воздействия, по которому вводится импульс по возмущению.
-Каскадные - двухконтурные замкнутые САР, построенные на базе двух стандартных регуляторов и использующих для регулирования кроме основной выходной координаты дополнительный промежуточный выход.
3.2.1 Комбинированные САР
Комбинированные системы регулирования применяют при автоматизации объектов, подверженных действию существенных
14
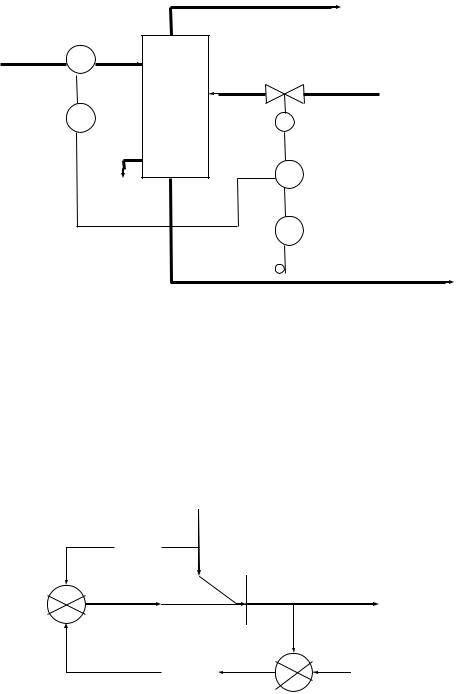
контролируемых возмущений. В качестве примера рассмотрим САР выпарной установки, изображенной на рисунке 3.4.
Соковый пар
исходный |
FE |
раствор |
|
|
греющий пар |
динамический |
QC 2 |
компенсатор |
|
|
QY сумматор |
|
конденсат |
|
QC 1 регулятор состава |
|
упаренный раствор |
Рисунок 3.4 – Схема автоматизации выпарной установки
Одним из наиболее сильных возмущений является изменение расхода исходного раствора. Основная задача регулирования - стабилизация концентрации упаренного раствора за счет изменения расхода греющего пара выполняется регулятором QC1. Кроме сигнала регулятора QC1, на клапан, регулирующий подачу пара, через динамический компенсатор QC2 поступает корректирующий импульс по расходу питания. Структурная схема системы регулирования имеет вид (смотри рисунок 3.5).
|
|
|
|
|
|
||
к |
Rк |
|
|
||||
|
|
|
|
|
|||
|
|
|
|
|
ОУ |
Y |
|
|
|
|
Wp |
|
Wв |
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
Yo |
|
|
|
|
||||
ОУ – объект управления (выпарная установка), |
R – регулятор (QC1), |
||||||
Rк – динамический компенсатор (QC2 ) , Wр- передаточная функция объекта по каналу регулирования, Wв - передаточная функция объекта по каналу возмущения.
Рисунок 3.5 – Структурная схема комбинированной САР
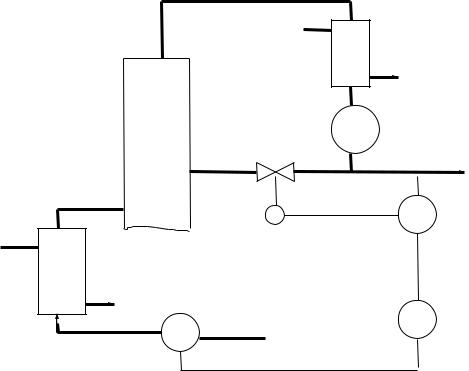
В качестве второго примера рассмотрим регулирование состава дистиллята в ректификационной колонне (смотри рисунок 3.6).
15
|
Вода |
3 |
2 |
|
|
|
|
4 |
|
|
дистиллят |
|
|
QC 5 |
пар |
|
|
1 |
|
|
|
|
QY 6 |
FE |
исходная |
|
|
смесь |
|
1- подогреватель исходной смеси, |
2-ректификационная колонна, 3- |
|
дефлегматор , 4- сборник дистиллята (флегмы), 5 -регулятор состава, 6 -динамический компенсатор.
Рисунок 3.6 – Схема автоматического регулирования состава дистиллята в процессе ректификации
Стабилизация состава дистиллята достигается путем изменения подачи флегмы на орошение колонны. Это обеспечивается регулятором QC
(5). Для повышения качества регулирования в системе предусмотрена автоматическая коррекция задания регулятору в зависимости от одного из основных возмущений в процессе - расхода разделяемой смеси. Корректирующий импульс на задание регулятору поступает через динамический компенсатор QY (6). Структурная схема системы регулирования представлена на рисунке 3.7.
Как видно из структурных схем обе САР обладают наличием двух каналов воздействия на выходную координату объекта. Введение корректирующего импульса по наиболее сильному возмущению позволяет существенно снизить динамическую ошибку регулирования при условии правильного выбора и расчета динамического устройства, формирующего закон изменения этого воздействия.
16

|
|
|
|
|
|
|
|
|
|
|
|
ОУ |
|
|
|
|
|
|
|
|
|
|
|
|
Wв |
|
|
|
|
|
|
|
||
Rк |
|
|
|
Wр |
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
R |
|
Yo |
|
|
|
|
|
|
|
Yк
Рисунок 3.7 – Структурная схема комбинированной САР
ОУ – объект управления (ректификационная колонна), R – регулятор (QC), Rк – динамический компенсатор (QY ) , Wр- передаточная функция объекта по каналу регулирования, Wв - передаточная функция объекта по каналу возмущения.
3.2.2 Каскадные САР
Каскадные САР применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
В этом случае в САР включают два регулятора - основной (внешний ) регулятор, служащий для стабилизации основного выхода объекта Y, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты Y1. Заданием для вспомогательного регулятора служит выходной сигнал основного регулятора. Структурная схема системы регулирования представлена на рисунке 3.8.
p1 |
|
W |
|
|
Y |
|
|
|
|
W 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
||
|
|
|
|
|
|
|
R1 |
1 |
Xp |
R |
Yo |
||
|
|
|
|
|
|
|
Рисунок 3.8 - Структурная схема каскадной САР
R - передаточная функция основного регулятора, R1- вспомогательного.
17
Вследствие более высокого быстродействия внутреннего контура в каскадной САР повышается качество переходного процесса, особенно при компенсации возмущений, поступающих по каналу регулирования.
В качестве примера рассмотрим процесс стабилизации температуры на выходе теплообменника, схема автоматизации которого представлена на рисунке 3.9.
2 |
Твых |
ТС
1 FC
Пар FE
конденсат
жидкость Твх Рисунок 3.9 – Схема автоматизации теплообменника
Вспомогательным контуром является САР расхода греющего пара.
При возмущении по давлению (изменяется расход) пара регулятор 1 (FC) изменяет степень открытия регулирующего клапана таким образом, чтобы поддержать заданный расход. При нарушении теплового баланса в аппарате (изменился расход, температура жидкости), приводящем к отклонению выходной температуры от заданного значения, регулятор температуры 2 корректирует заданию регулятору расхода 1.
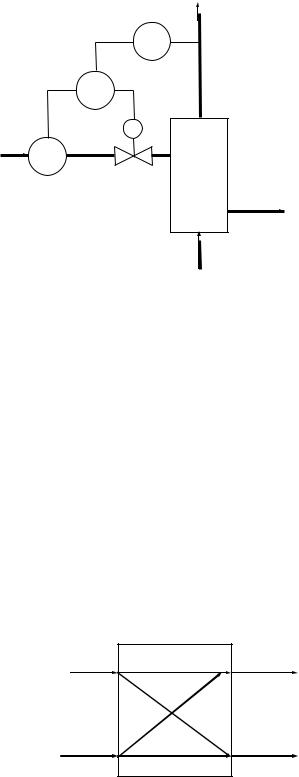
3.3 Взаимосвязанные системы регулирования
Объекты с несколькими входами и выходами, взаимно связанными между собой, называют многосвязными объектами. Пример такого объекта приведен на рисунке 3.10.
Х1 |
W11 |
Y1 |
W21 |
W12 |
|
X2 |
W22 |
Y2 |
Рисунок 3.10 – Многосвязный объект
18
Существуют два различных подхода к автоматизации |
|
многосвязных |
объектов: |
|
|
- несвязанное регулирование отдельных координат |
с |
помощью |
одноконтурных САР. |
|
|
- связанное регулирование с применением многоконтурных систем, в которых внутренние перекрестные связи объекта компенсируются внешними динамическими связями между отдельными контурами регулирования.
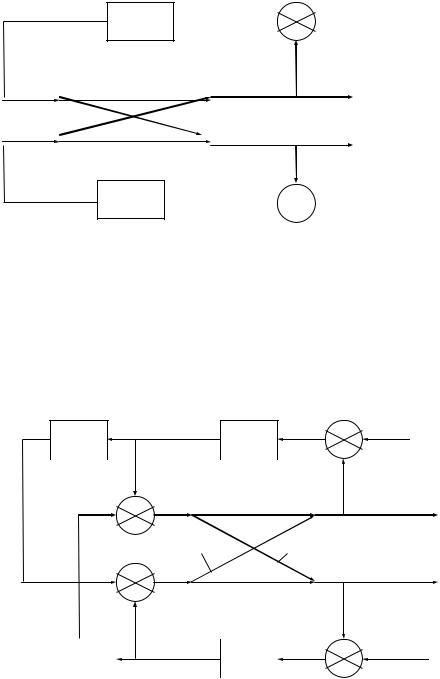
3.3.1Система несвязанного регулирования многосвязного объекта
Структурная схема такой системы имеет вид:
R1 
 Y10
Y10
p1 |
W11 |
Y1 |
|
W21 |
|
p2 |
W22 W12 |
Y2 |
|
|
|
R2 
 Y20
Y20
Рисунок 3.11 – Структурная схема несвязанного регулирования Расчет одноконтурных систем автоматического регулирования в этом
случае ведется с учетом внутренних связей и других контуров регулирования.
3.3.2 Система связанного регулирования многосвязного объекта
Структурная схема системы имеет вид:
р1
|
R12 |
|
|
|
|
R1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
21 |
|
1 |
|
|
W11 |
||
|
|
|
W |
21 |
|
W12 |
||
|
12 |
|
2 |
|
|
W22 |
||
|
|
|
|
|
|
|
|
|
|
|
|
p2 |
|
|
|
|
|
|
R21 |
|
|
|
R2 |
|
||
|
|
|
|
|
|
|
|
|
Y10
Y1
Y2
Y20
Рисунок 3.12- Структурная схема несвязанного регулирования
19
Перекрестные каналы играют роль каналов возмущения. Для компенсации этих возмущений в систему регулирования вводят динамические устройства, сигналы от которых поступают на соответствующие каналы регулирования.
4 Измерительные преобразователи и приборы
Измерить какую-либо величину - значит сравнить ее с другой однородной величиной (называемой мерой), принятой за единицу.
Измерения делятся на : прямые, косвенные, совокупные.
Прямыми измерениями называются такие, при которых значение измеряемой величины определяется непосредственным сравнением ее с мерами или показаниями измерительных приборов, градуированных в выбранных единицах измерений.
Основными методами прямых измерений являются: непосредственного определения, компенсационный (нулевой), дифференциальный.
Методом непосредственного определения значение измеряемой величины прямо преобразуется в выходную величину прибора.
Компенсационный метод состоит в уравновешивании неизвестной измеряемой величины известной. Значение измеряемой величины находится после достижения равновесия по значению уравновешивающей величины. Момент равновесия фиксируется устройством, называемым нульиндикатором. Компенсационный метод более точен, чем метод непосредственного определения.
Дифференциальный метод заключается в том, что прибором определяется разность между измеряемой и некоторой известной (образцовой) величиной, после чего измеряемая величина находится путем алгебраического сложения.
Существенный признак прямого измерения - результат выражается в тех же единицах, что и измеряемая величина.
Косвенными измерениями измеряемая величина определяется не непосредственно, а на основании данных прямых измерений величин, связанных с искомой величиной определенным соотношением (R=U/I).
При совокупных измерениях числовые значения измеряемой величины определяются путем решения ряда уравнений, полученных из совокупности прямых измерений одной или нескольких однородных величин.
Измерительным прибором называется устройство, служащее для прямого или косвенного сравнения измеряемой величины с единицей измерения, при этом измерительная информация вырабатывается в форме, доступной для непосредственного восприятия наблюдателем.
Средство измерения, вырабатывающее сигнал в форме, удобной для передачи, дальнейшего преобразования, обработки или хранения, но не позволяющее наблюдателю осуществить непосредственное восприятие, называют измерительным преобразователем.
20