

Lek-AAKhTP
.pdfQп |
Q |
Qп |
|
|
Qр |
Н |
0 |
t |
Qр |
Н |
|
Но |
|
|
|
0 |
t |
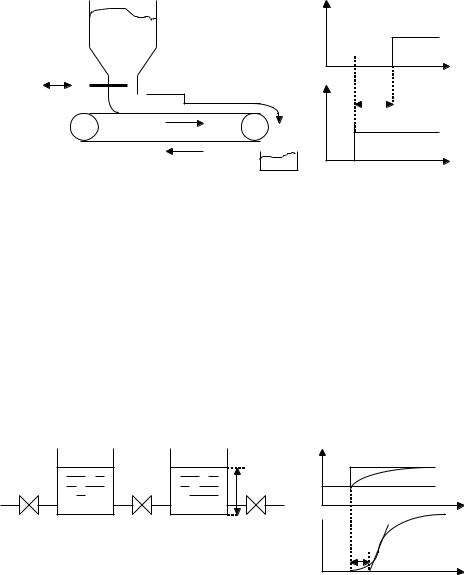
Рисунок 14.2 – Проточная емкость. Объект, не обладающий самовыравниванием
При нарушении равновесия притока и расхода, уровень жидкости начинает увеличиваться, поскольку расход остается на прежнем уровне. Объект самостоятельно не может возвратиться в равновесное состояние.
Некоторые объекты обладают идеальным самовыравниванием, например, резервуар с переливной трубой, обеспечивающий постоянный уровень при любых изменениях притока жидкости.
Самовыравнивание характеризуется коэффициентом (степенью)
самовыравнивания: = / y , где = Q п/Qмакс , у = Н /Но , где Q п иН приращение притока и величины уровня соответственно.
Коэффициент самовыравнивания не является постоянной величиной, а зависит от нагрузки объекта. Максимальной нагрузке соответствует максимальное значение .
14.3Запаздывание объекта
Вреальных объектах часто между моментом нарушения равновесия и началом изменения управляемой величины проходит некоторое время - запаздывание. Запаздывание объясняется наличием сопротивлений и
инерционностью системы.
Различают два вида запаздывания: чистое (или транспортное) и переходное (емкостное).
Чистым запаздыванием называется время от момента внесения возмущающего воздействия до начала изменения управляемой величины (смотри рисунок 14.3). Это время необходимо для того, чтобы поток вещества или энергии, обладающий скоростью v, прошел расстояние L от места внесения возмущающего воздействия до места, в котором измеряется значение управляемой величины. Например, при контроле толщины насыпного слоя на ленте транспортера, когда датчик толщины слоя находится на правом конце транспортера, а возмущение (изменение
91
положения заслонки на выходе из бункера) наносится на левом конце транспортера.
Хвых
t
Хвх
Хвх |
|
|
|
to |
t |
Рисунок 14.3 - Объект, обладающий чистым запаздыванием
Чистое запаздывание смещает во времени реакцию на выходе в объекте по сравнению с моментом нанесения входного воздействия на величину запаздывания, не изменяя величину и форму воздействия.
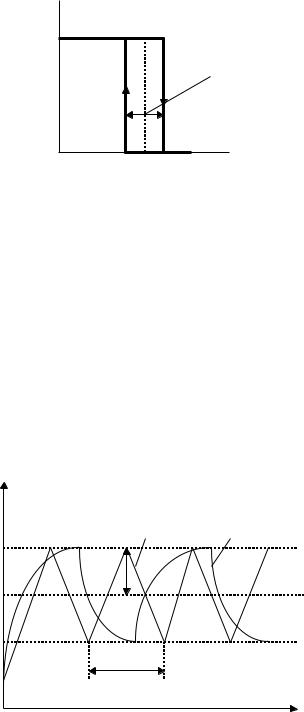
Обычно в управляемых объектах имеется не только чистое, но и переходное запаздывание, которое характерно для многоемкостных объектов. Запаздывание возникает при преодолении потоком вещества или энергии сопротивлений, разделяющих гидравлические, тепловые и другие емкости объекта. Например, для гидравлического объекта, изображенного на рисунке 14.4, изменение уровня Н на выходе будет происходить, как показано на рисунке.
|
|
Q |
|
|
Qп |
|
Н |
Qр |
Qп |
R |
Qр |
t
H
п
t
Рисунок 14.4 - Объект, обладающий переходным (емкостным) запаздыванием
Время переходного запаздывания определяется отрезком п, которое находится путем проведения касательной к кривой переходного процесса в точке перегиба. Переходное запаздывание определяется числом емкостей и величиной переходных сопротивлений. Поскольку величины переходных сопротивлений в процессе эксплуатации объекта могут изменяться, величины запаздываний могут возрастать.
Общее запаздывание общ в объекте управления равно сумме чистого и переходного запаздываний:
общ = + п.
Как чистое (транспортное) так и переходное запаздывания всегда неблагоприятно сказываются на качестве управления.
92
15 Автоматические регуляторы
Автоматический регулятор - это средство автоматизации, получающее, усиливающее, и преобразующее сигнал отклонения регулируемой величины и целенаправленно воздействующее на объект регулирования. Он обеспечивает поддержание заданного значения регулируемой величины или изменение ее значения по заданному закону.
15.1 Классификация регуляторов
Регуляторы классифицируются в зависимости от назначения, принципа действия, конструктивных особенностей, вида используемой энергии и т.д.
По виду регулируемого параметра регуляторы бывают: температуры, давления, расхода, соотношения и т.д.
По конструктивным признакам: аппаратные, приборные. Аппаратный регулятор - устройство, работающее в комплекте с первичным измерительным преобразователем. Такой регулятор работает независимо (параллельно) от средств измерения данного технологического параметра. Приборный регулятор работает только в комплекте с вторичным измерительным прибором. Сигнал рассогласования на вход регулятора поступает с выхода вторичного измерительного прибора. В ряде случаев само регулирующее устройство приборного типа размещается в одном корпусе с вторичным измерительным прибором.
Достоинством приборных регуляторов является то, что не требуется установка дополнительных первичных преобразователей и прокладки линий связи от них до регуляторов. Недостатком - более низкие динамические свойства и надежность по сравнению с аналогичными параметрами регуляторов аппаратного типа.
В зависимости от источника используемой энергии регуляторы подразделяются на регуляторы прямого и косвенного (непрямого) действия. В регуляторах прямого действия одновременно с измерением регулируемой величины от объекта регулирования отбирается часть энергии, которая используется для работы регулятора и воздействия на его исполнительный механизм. Таким образом, в систему автоматического регулирования энергия извне не подводится. При использовании регуляторов косвенного действия энергия для их работы подводится извне.
В зависимости от вида используемой энергии регуляторы косвенного действия подразделяются: электрические, пневматические, гидравлические, комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы.
Электрические регуляторы применяются главным образом для регулирования на невзрывоопасных объектах при больших расстояниях от пункта управления до объекта регулирования. К недостаткам этих
93
регуляторов следует отнести сложность аппаратуры, которая требует высокой квалификации эксплуатационного и наладочного персонала.
Пневматические регуляторы применяются во взрыво- и пожароопасных зонах при небольших расстояниях (до 300 м) от пункта управления до объекта регулирования. Достоинством их является простота в обслуживании и наладке. Недостатком - потребность в специальном источнике питания, жесткие требования к его качеству, большая инерционность.
Гидравлические регуляторы применяются во взрыво- и пожароопасных зонах, как правило, при непосредственном размещении элементов регулятора в зоне объекта регулирования. Достоинством регуляторов является надежность, большие развиваемые перестановочные усилия. Недостатки - потребность в специальном питании, ограниченный радиус действия, трудность реализации сложных законов регулирования.
Комбинированные регуляторы применяются в случаях, когда необходимо использовать отдельные преимущества электро-, пневмо-, или гидрорегуляторов.
По характеру изменения регулирующего воздействия регуляторы подразделяются на регуляторы с линейным и нелинейным законами регулирования.
По виду задающего воздействия на регулятор регуляторы делят на:
-Стабилизирующие - поддерживающие регулируемый параметр на определенном заданном значении во времени.
-Программные - поддерживающие параметр по заранее заданному закону во времени.
-Следящие - изменяющие регулируемый параметр в соответствии с законом изменения другого параметра или величины, меняющихся по
неизвестному закону, который характеризует какой-либо другой процесс и является управляющим по отношению к регулируемому параметру (например, регулирование соотношения расходов).
По характеристике действия (зависимости между изменением регулируемой величины и перемещением регулирующего органа (регулирующего воздействия)) регуляторы подразделяются на: позиционные, пропорциональные, интегральные, пропорционально-интегральные, пропорционально-дифференциальные, пропорционально-интегрально- дифференциальные.
15.2 Позиционные регуляторы
Регулятор, у которого регулирующий орган может занимать ограниченное число определенных положений, называется позиционным. Чаще всего применяются двух и трехпозиционные регуляторы. У двухпозиционных регуляторов, в зависимости от знака отклонения регулируемой величины, регулирующий орган либо полностью открыт, либо закрыт.
Уравнение двухпозиционного регулятора:
94
= 0 |
при |
у 0 |
= 1 |
при |
у 0, |
где - регулирующее воздействие, у – рассогласование заданного и текущего значения регулируемой величины.
Статическая характеристика регулятора имеет вид:
1 |
6 |
2 |
|
|
|
|
нейтральная зона |
|
|
|
(зона нечувствительности) |
0 |
5 |
3 |
4 |
|
Узд |
|
У |
Узд – заданное значение регулируемой величины, У- текущее значение регулируемой величины.
Рисунок 15.1 – Статическая характеристика двухпозиционного регулятора
Реальные позиционные регуляторы имеют зону нечувствительности вследствие наличия ее у элемента сравнения и усилителя, входящих в состав регулятора. Кроме того в структуру регулятора вводят специально звенья, позволяющие изменять ширину этой зоны. Участки характеристики 2-3 и 5-6 соответствуют мгновенному перемещению регулирующего органа из положения " открыто" в положение "закрыто".
Вид графика изменения регулируемой величины будет зависеть от типа объекта регулирования (статического или астатического).
Y |
|
|
1 |
2 |
2-объект статический |
Ymax |
|
1 -объект астатический |
A |
|
|
Yзд |
|
|
Ymin |
|
|
T |
|
|
0 |
|
t |
Рисунок 15.2 – Графики изменения регулируемой величины при позиционном регулировании
Из графика следует, что при уменьшении зоны нечувствительности амплитуда А и период колебаний Т регулируемого параметра будут
95
уменьшаться. При нейтральной зоне, стремящейся к нулю частота переключений регулирующего органа (f = 1/ T) будет бесконечно большой. Поэтому для уменьшения износа переключательной аппаратуры и регулирующего органа необходимо вводить зону нечувствительности, при которой амплитуда колебаний регулируемого параметра не выходила бы за допустимые пределы, а частота переключений обеспечивала достаточную надежность работы регулятора.
Позиционные регуляторы выпускаются как аппаратного, так и приборного типа.
Простейшим критерием, исходя из которого может быть выбран позиционный закон регулирования, является отношение чистого запаздывания к постоянной времени Т объекта управления. Позиционный закон выбирается при / Т 0.2.
15.3 Пропорциональный регулятор
Пропорциональным (статическим, П-регулятором) называется такой регулятор, у которого перемещение регулирующего органа (регулирующее воздействие ) пропорционально отклонению Y регулируемого параметра от заданного значения, т.е.
= S1 Y = Кр Y , где S1 (Кр) - коэффициент усиления регулятора, являющийся его настроечным параметром.
Передаточная функция регулятора:
W(p) = S1 = Кр
П-регуляторы могут быть прямого и косвенного действия.
Для характеристики регулятора часто (особенно для пневматических) применяется величина обратная коэффициенту усиления - предел пропорциональности. Она выражается в процентах:
= ( 1 / Кр ) 100%
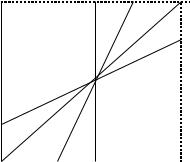
Статическая характеристика П-регулятора имеет вид, представленный на рисунке 15.3.
|
=0 |
100 |
=100 |
|
100 |
|
|
|
|
|
|
|
|
100 |
50 |
|
|
|
= |
|
|
|
||
0 |
|
|
|
50 |
100 Y |
||
Рисунок 15.3 - Статическая характеристика П-регулятора
96
Чем меньше предел пропорциональности, тем при меньших значениях изменения регулируемой величины регулирующий орган перемещается из одного крайнего положения в другое. При =0 пропорциональный регулятор превращается в двухпозиционный.
Основным достоинством П-регулятора является простота и наличие пропорциональной зависимости между скоростью перемещения регулирующего органа и скоростью изменения регулируемой величины, что свидетельствует о его достаточном быстродействии.
Недостатком регулятора является наличие статической ошибки, т.е. остаточного отклонения регулируемой величины, величина которого тем больше, чем больше предел пропорциональности регулятора.
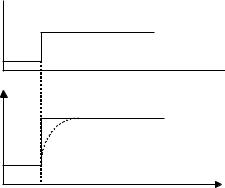
Временная характеристика регулятора имеет вид:
Y
 t
t
0 |
t |
to
Рисунок 15.4 - Временная характеристика П-регулятора
Пунктиром представлена характеристика реального П-регулятора.
15.4 Интегральный регулятор
Интегральным или астатическим называется такой регулятор, у которого перемещение регулирующего органа (регулирующее воздействие) пропорционально интегралу отклонения регулируемого параметра от заданного значения:
So t Ydt 0 |
1 |
t Ydt o , где |
0 - |
|
|||
0 |
Tи o |
|
|
регулирующее воздействие при исходном положении регулирующего органа, So –коэффициент пропорциональности, Ти – время интегрирования.
Передаточная функция регулятора имеет вид:
W(p) = So / p = 1 / Tир .
Астатическим регулятор называется потому, что одному и тому же значению регулируемого параметра могут соответствовать различные положения регулирующего органа.
So-коэффициент пропорциональности, представляющий скорость перемещения регулирующего органа при 100% отклонении регулируемого
97
параметра. Ти (время интегрирования) -время перемещения регулирующего органа из одного крайнего положения в другое при 100% отклонении регулируемого параметра .
При скачкообразном изменении Y на величину Y получим:
=( 1 / Ти ) Y t
Откуда видно, что временная характеристика регулятора - прямая линия, наклон которой зависит от Ти.
|
|
|
Ти2 |
|
Ти2 Ти1 |
|
Ти1 |
о |
Ти= |
0 |
t |
Y |
|
|
Y |
0 |
t |
Рисунок 15.5 – Временная характеристика И-регулятора
Недостатком интегрального регулятора является относительно невысокая скорость регулирования.
Достоинством - регулирование без остаточного отклонения (если объект статический, т.е. обладающий самовыравниванием). Если объект астатический, то система регулирования получается неустойчивой.
15.5 Пропорционально-интегральный регулятор
Пропорционально-интегральным регулятором (ПИ-регулятором) называется регулятор, у которого регулирующее воздействие пропорционально как отклонению, так и интегралу отклонения регулируемой величины от заданного значения.
к |
|
Y |
1 |
t Ydt . |
р |
|
|||
|
|
Т и o |
||
|
|
|
||
Передаточная функция ПИ-регулятора: W(p) = кр + 1 /(Тир).
В этом случае по структуре ПИ-регулятор эквивалентен параллельному
соединению |
П-регулятора и |
И-регулятора. Если |
при настройке ПИ- |
регулятора |
установить Ти= , |
то он превратится |
в П-регулятор. Если |
установить |
кр =0 , то получим И-регулятор. Структурная схема ПИ - |
||
регулятора, в рассматриваемом варианте, имеет вид:
98
Кр
Y |
|
1 / Tир
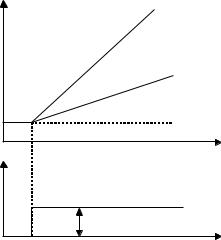
Рисунок 15.6 – Структурная схема ПИ-регулятора с независимыми настройками
Параметрами настройки регулятора являются коэффициент усиления кр и постоянная времени интегрирования Ти.. Настройки регулятора, выполненного по такой схеме являются независимыми.
При постоянном входном сигнале Y=Yo уравнение регулятора можно представить в виде:
= крYo + (1 / Tи) Yot
Откуда видно, что при скачкообразном изменении входного сигнала идеальный ПИ-регулятор сначала мгновенно изменяет свой выходной сигнал на значение крYo , а затем начинает его увеличивать со скоростью
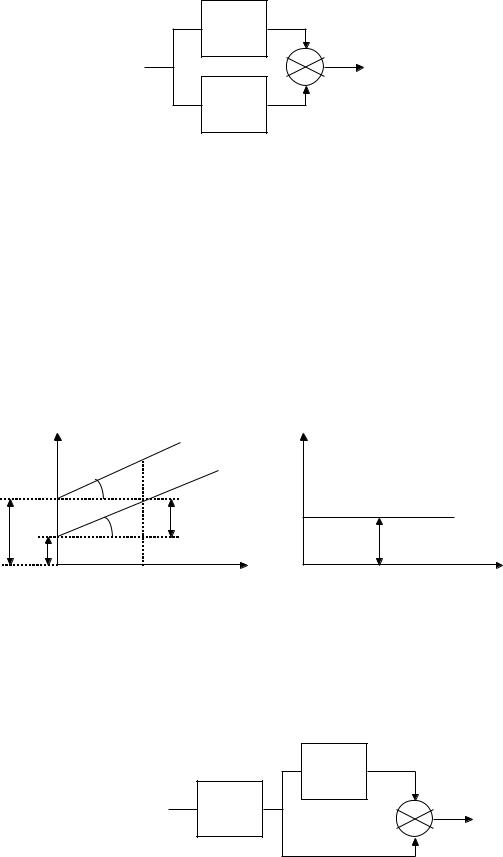
Y0 /Tи. При этом временная характеристика регулятора будет иметь вид:
|
|
Y |
|
|
|
кр2Yo |
|
Yo |
кр1Yo |
|
|
0 |
Tи |
t |
|
Yo |
0 |
t |
Рисунок 15.7 – Временная характеристика ПИ-регулятора с независимыми настройками
Кроме рассмотренной структурной схемы ПИ-регулятора на практике широко применяется следующая схема:
|
|
1 / Тизр |
Y |
Кр |
|
Рисунок 15.8 – Структурная схема ПИ-регулятора с зависимыми настройками
99
Такая схема регулятора реализует ПИ-закон регулирования в виде:
к |
|
(Y |
1 |
t Ydt) , где Тиз - время изодрома, Тиз=Ти кр. |
|
р |
Т из |
||||
|
|
|
|||
|
|
|
0 |
Передаточная функция регулятора имеет вид:
W(p) к р (Т из р 1)
Т из р
Регулятор по такой схеме имеет взаимосвязанные параметры настройки статической и астатической частей по коэффициенту усиления Кр. Так, при изменении Кр будет изменяться и постоянная времени интегрирования
Ти = Тиз / Кр.
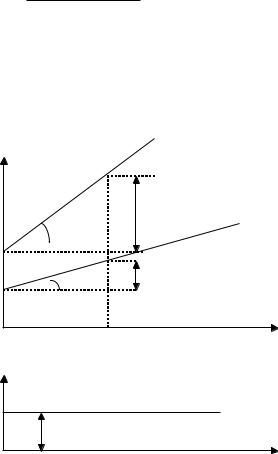
Временная характеристика такого регулятора имеет вид:
|
|
|
|
|
Кр2Yo |
|
2 |
|
Кр2Yo |
|
|
|
|
Кр1Y0 |
Кр1Yo |
1 |
|
0 |
Тиз |
t |
Y |
|
|
|
Yo |
|
0 |
|
t |
Рисунок 15.9 – Временная характеристика ПИ-регулятора с зависимыми настройками
Из рисунка 15.9 ясен физический смысл времени изодрома - это время в течение которого от действия интегральной составляющей выходной сигнал удваивается по сравнению с пропорциональной составляющей закона регулирования.
ПИ-регуляторы могут применяться, когда необходима высокая точность регулирования, для объектов любой емкости как при наличии, так и при отсутствии самовыравнивания, при больших, но плавных изменениях нагрузки.
15.6 Дифференциальные регуляторы
Реально такие регуляторы бывают двух видов: пропорциональнодифференциальные (ПД-) и пропорционально-интегрально-
100