

4.1. Приведённые инерционные параметры
Приведённые инерционные параметры расчитываются из условия сохранения киннетических энергий инерционных масс действительной динамической системы и преденной динамической модели.
![]() =
=![]() +
+![]() +
+![]() +
+![]() +
+![]() +
+![]() +
+![]()
![]()
![]() - Потенциальная энергия действительной
динамической системы
- Потенциальная энергия действительной
динамической системы
![]() - Потенциальная энергия приведенной
динамической системы
- Потенциальная энергия приведенной
динамической системы
![]() =
=![]() +
+![]() +
+![]() +
+![]()
![]() =
=![]()
![]() - потенциальная энергия приведенной
ременной системы
- потенциальная энергия приведенной
ременной системы
![]() =
=![]()
![]() =
=![]()
![]() =
=![]()
![]() =
=![]() +
+![]() +
+![]() +
+![]()
![]() =
=![]() ×
×![]() =
=![]() (i
(i![]() )²
)²
![]() =
=![]() =
=![]() =72,327·14²=2,835·
=72,327·14²=2,835·![]()
![]() =
=![]() ·(i
·(i![]() )=2,835·
)=2,835·![]() ·2²=1,134·
·2²=1,134·![]()
![]() =
=![]() *(
*(![]() )²=6,921·
)²=6,921·![]() ·2²=2,768·
·2²=2,768·![]() кг·см/рад
кг·см/рад
![]() =
=![]() =6,351·
=6,351·![]() кг·см/рад
кг·см/рад
![]() =
=![]() *(i
*(i![]() )²=6,351·
)²=6,351·![]() ·1²=6,351·
·1²=6,351·![]()
5. Математическое описание приведенной динамической модели
Для вывода математической модели используем прямой метод. Прямой метод заключается в отделении инерционных масс от упругого скелета уравнения равновесия динамической модели и составления для каждой из них уравнения равновесия всех обобщенных сил, действующих на них. Вследствие этого обобщенная движущая сила, приложенная к каждой массе со стороны ее входа, затрачивается на преодоление силы сопротивления, действующей со стороны входа, а также инерционной силы, развивающейся при колебательном движении этой массы. J
1 масса
|
|
|

2 масса
|
|
|

3 масса
|
|
|

4 масса
|
|
|

5 масса
|
|
|

Запишем колебания ПДМ в виде системы
линейных неоднородных дифференциальных
уравнений второго порядка:
![]()
![]()
![]()
![]()
![]() (1)
(1)
Перейдем к относительным обобщенным координатам для минимального количества степеней свободы:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (2)
(2)
Разделим каждое уравнение системы (1) на коэффициент, стоящий перед производной второго порядка, с учетом (2) получим:
![]()
![]()
![]()
![]()
![]() (3)
(3)
Вычитая попарно уравнения системы (3) получим:
![]()
![]()
![]() (4)
(4)
![]()
Решение системы (4) складывается из решения системы однородных уравнений и частных решений, соответствующих правым частям дифференциальных уравнений данной системы.
В итоге уменьшилось число дифференциальных уравнений, следовательно, систему легче решать. Теперь число дифференциальных уравнений точно соответствует числу степеней свободы.
Запишем однородную систему в виде:
![]()
![]()
![]() (4)
(4)
![]()
6. Исследование системы линейных уравнений
Исследуем систему однородных дифференциальных уравнений(4):
![]()
![]()
![]() (4)
(4)
![]()
Представим приведенную модель (4) в виде двух массовых парциальных контуров:

Рис.6.1. Парциальные контуры
![]() парциальные
частоты парциальных контуров
парциальные
частоты парциальных контуров
![]() коэффициенты
связей инерционных масс в парциальных
системах
коэффициенты
связей инерционных масс в парциальных
системах
Введем обозначения:
![]()
![]()
![]() (5)
(5)
![]()
![]()
![]()
![]() (6)
(6)
![]()
![]()
Запишем систему (4) с учётом (5):
![]()
![]() (7)
(7)
![]()
![]()
Приведём выражение всех коэффициентов в системе (7) к однородному виду, введя обозначение:
![]()
![]() (8)
(8)
![]()
![]()
![]()
Запишем систему (7) с учётом (8) и получим:
![]()
![]() (9)
(9)
![]()
![]()
Найдём решение системы уравнений (9), введя обозначения:
![]()
![]()
![]() (10)
(10)
![]()
![]() -
неизвестная амплитуда колебаний на
определённой частоте;
-
неизвестная амплитуда колебаний на
определённой частоте;
k- собственная частота колебний.
Найдём вторую производную обозначений системы (10). Она примет вид:
![]()
![]()
![]() (11)
(11)
![]()
Подставим (10) и (11) в (9) и получим:
![]()
![]() (12)
(12)
![]()
![]()
Для нахождения собственных частот составим частотный определитель

Раскроем частотный определитель в следующем виде:
 (13)
(13)
![]() - миноры соответствующих элементов
первой строки частотного определителя.
- миноры соответствующих элементов
первой строки частотного определителя.

С учётом (13) получим частотное уравнение в аналитическом виде:

Вычислим значения парциальных частот и коэффициентов связей инерционных масс между парциальными контурами:




![]()
![]()
![]()
![]()
![]()
Вычислим коэффициенты частотного уравнения:



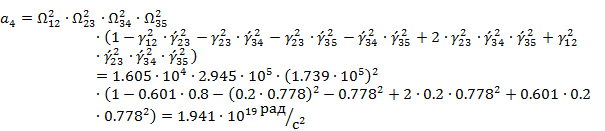
Обозначим:
![]()
В итоге получим уравнение 4-й степени:
![]()
Сократим уравнение на общий член 1020. В итоге получим:
![]()
Найдем корни уравнения с помощью метода
последовательного перебора предполагаемых
значений от 0 до значений, при котором
![]() Так как уравнений 4-й степени, следовательно,
процесс перебора произведём 4 раза:
Так как уравнений 4-й степени, следовательно,
процесс перебора произведём 4 раза:
p1=0.064
p2=0.386
p3=1.823
p4=4.34
Проверка:
p1+p2+p3+p4=a1=6.583
![]()
p1∙p2∙p3∙p4=a4=0.194
![]()
Так как ![]()
![]()
![]()
![]()
![]()
Следовательно,
![]()
![]()
![]()
![]()

Рисунок 6.2. Значения угловых частот, парциальных частот и собственных частот колебаний валов
В системе (21) количество уравнений 5, а неизвестных форм колебаний 4, следовательно, одно уравнение можно не использовать для нахождения коэффициентов. Целесообразно не использовать самое сложное уравнение, а применить его для проверки полученных результатов.
Выразим из 1-го, 2-го, 4-го и 5-го уравнений
системы (21) коэффициенты ![]() :
:
![]()

![]()
![]()
Рассчитаем значения коэффициентов форм собственных колебаний на каждой частоте:
Первая форма собственных колебаний:
![]()
![]()

![]()
![]()
Вторая форма собственных колебаний:
![]() ;
;
![]()


![]()
3. Третья форма собственных колебаний.
![]()



![]()
4. Четвертая форма собственных колебаний
![]()


![]()
![]()

Рисунок 7.3. Формы крутильных колебаний
ВЫВОДЫ
В данной курсовой работе был произведен динамический расчет привода ротационной печатной машины. В качестве расчета была выбрана линейная динамическая система, в которой все рабочие органы совершают свое вращательное движение с постоянной скоростью.
В задании были указаны основные параметры элементов привода. На основе их численных значений были рассчитаны основные силовые и скоростные параметры. Затем были определены основные геометрические параметры основных элементов привода.
Затем были выбраны основные инерционные массы и упругие участки. Для них были рассчитаны инерционные моменты и жесткости.
Шкивы, цилиндры имеют сложную форму, следовательно, моменты инерции и жесткости для них рассчитывались как сумма значений элементарных деталей, соединенных последовательно.
Для динамической системы была составлена приведенная динамическая модель, где не учитываются зазоры в зубчатых передачах, нелинейные факторы в зоне печатного контакта печатной пары печатной секции.
Приведение заключалось в выборе звена приведения и выравнивания скоростей всех остальных звеньев относительно скорости звена приведения. Следовательно, возникла необходимость корректировки инерционных и жесткостных параметров производился из условия равенства кинематической и потенциальных энергий действительной и приведенной систем.
Для вывода дифференциальных уравнений, описывающих крутильные колебания динамической модели, применялся прямой метод.
После составления системы дифференциальных уравнений необходимо было ее исследовать. Исследовалась система в виде однородных уравнений. Система была представлена в виде 2-хмассовых парциальных контуров.
Для нахождения собственных частот решение искалось в виде
![]()
В итоге получили систему дифференциальных
уравнений относительно неизвестных
частот ![]() .
Из этой системы был составлен частотный
определитель. Затем было составлено
частотное уравнение в аналитическом
виде. Каждый корень данного уравнения
равен квадрату собственных частот.
Корни уравнения определялись методом
последовательного перебора параметра
частотного уравнения, при котором
значение полинома равно 0.
.
Из этой системы был составлен частотный
определитель. Затем было составлено
частотное уравнение в аналитическом
виде. Каждый корень данного уравнения
равен квадрату собственных частот.
Корни уравнения определялись методом
последовательного перебора параметра
частотного уравнения, при котором
значение полинома равно 0.
В результате были получены 4 собственные частоты крутильных колебаний и для каждой из них найдены формы собственных колебаний и построены эпюры на каждой собственной частоте.
Анализируя полученные графики форм собственных колебаний можно сделать выводы:
- на 1-й форме колебаний инерционные массы колеблются незначительно, интенсивности колебаний каждой массы почти одинаковы;
- на 2-й форме колебаний массы колеблются интенсивнее, но с небольшой разницей в амплитудных значениях;
- на 3-1 форме колебания интенсивны и с большими амплитудными значениями;
- на 4-й форме самые значительные по интенсивности колебания. Необходимо рассчитать ведущий вал на прочность и долговечность.
Также из графиков можно сделать вывод, что ни одна узловая точка эпюр форм собственных колебаний не проходит через инерционные массы, содержащие зубчатые передачи, муфты с зазором и т.п., иначе это могло привести к раскрытию зазоров.
В итоге, в данной работе мы ознакомились с необходимым набором методик исследования динамических систем в весьма удобном и оригинальном виде.