

330 / ЗаданКурсЖурналПолныйМПУСУ / ИспользованиеMicroPC
.pdf
|
|
СИСТЕМНАЯ ИНТЕГРАЦИЯ |
|
|
||
|
|
РАСПРЕДЕЛЁННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ |
||||
|
|
Автоматизация |
|
|||
|
|
территориально |
|
|||
|
|
рассредоточенных объектов |
||||
|
|
с использованием средств |
||||
|
|
MicroPC |
|
|
||
|
|
Виктор Сумительнов, Константин Козлов, Денис Афонин |
||||
|
|
В статье предложены решения по автоматизации территориально рассредоточенных |
||||
|
|
объектов с передачей сигналов на устройства и системы по радиоканалу связи |
||||
|
|
и формированием сообщений в соответствии с требованиями стандартов |
||||
|
|
серии ГОСТ Р МЭК 870. Предложенные решения реализованы |
||||
|
|
с использованием аппаратных средств MicroPC. |
|
|||
Задача создания |
автоматизирован |
наряду с этим имеется множество тер |
В данной статье рассмотрены вари |
|||
ных систем управления территориаль |
риториально рассредоточенных про |
анты проектного решения задач авто |
||||
но рассредоточенными |
процессами |
цессов, для которых предпочтительнее |
матизации территориально рассредо |
|||
решается системными интеграторами |
унифицированные решения автомати |
точенных объектов на базе техниче |
||||
достаточно часто, что можно просле |
зации на основе проектной компонов |
ских средств, объединяемых техноло |
||||
дить, например, по количеству публи |
ки программно технических комплек |
гией MicroPC, радиоканала связи и |
||||
каций на эту тему. |
|
|
сов телемеханического |
назначения с |
протоколов передачи телемеханиче |
|
Такие разработки |
выполняются по |
использованием современных систе |
ских сообщений в соответствии с тре |
|||
технологии телемеханики. Их большое |
мотехнических средств: программируе |
бованиями ГОСТ Р МЭК 870 5 1. Ста |
||||
разнообразие |
является |
следствием |
мых контроллеров с широким набором |
тья предназначается для тех, кто ори |
||
стремления системных интеграторов |
функциональных модулей, промыш |
ентирован на применение средств |
||||
найти наиболее предпочтительные ре |
ленных шин и средств связи, обеспечи |
MicroPC и кого интересуют вопросы |
||||
шения с учётом широкого разброса |
вающих передачу сигналов по провод |
унификации решений телемеханиче |
||||
требований к |
организации каналов |
ным (в том числе и оптоволоконным) и |
ских систем в соответствии с дейст |
|||
связи, к составу и объёму телемехани |
беспроводным линиям |
или каналам |
вующими стандартами. |
|||
ческих функций, к условиям эксплуа |
связи. Принципиально новые возмож |
|
||||
тации оборудования на объектах неф |
ности унификации появились с введе |
ОБЩИЕ ПОЛОЖЕНИЯ |
||||
тяной и газовой промышленности, |
нием стандартов серии ГОСТ Р МЭК |
Известно, что АСУ ТП создаются на |
||||
электроэнергетики, |
железных дорог, |
870, в которых нормируются не только |
основе принципов системного подхо |
|||
мелиорации, гидрометеорологии, жи |
технические требования и условия экс |
да, одним из которых является разбие |
||||
лищно коммунального хозяйства и т.д. |
плуатации, но также форматы данных |
ние всей системы на подсистемы и учёт |
||||
Очевидно, что потребность в специ |
и протоколы передачи телемеханиче |
при разработке не только свойств от |
||||
фичных разработках будет всегда, но |
ских сообщений. |
|
дельных подсистем, но и связей между |
|||
|
|
|
|
|
|
ними. По этой причине в составе тер |
|
|
|
|
|
|
риториально рассредоточенных АСУ |
|
|
|
|
УКП |
Связь |
ТП методически важно выделить в ка |
|
УПУ |
|
Канал связи |
УКП |
честве отдельной подсистемы телеме |
|
|
|
с объектом |
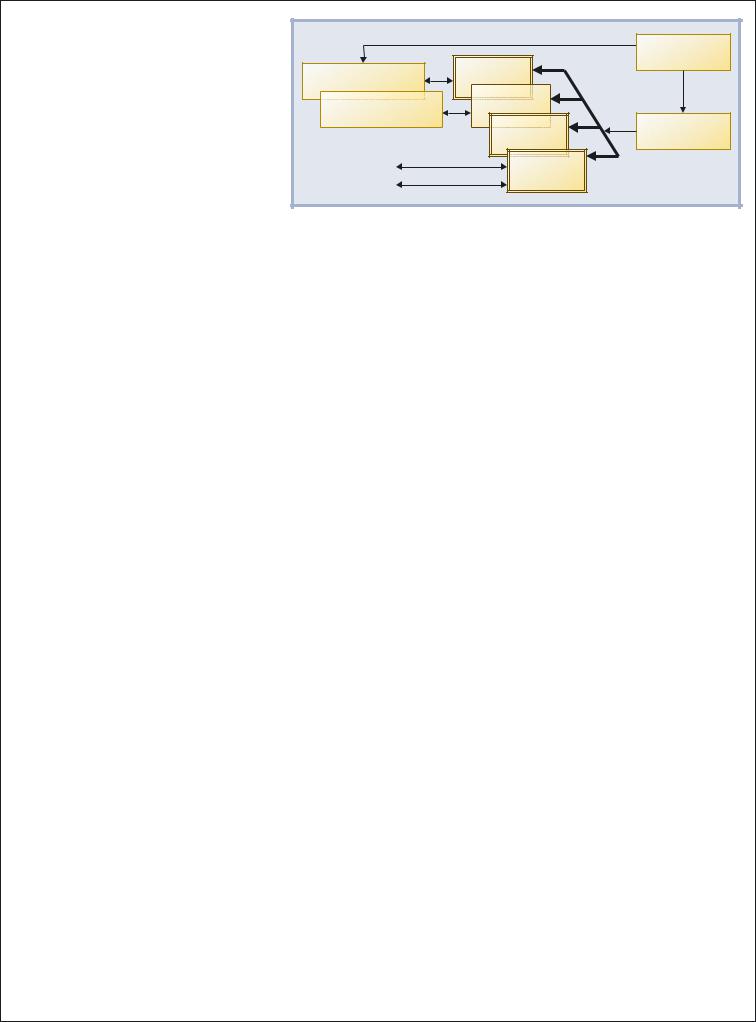
ханическую сеть (ТмС) – совокупность |
|||
|
|
|
|
УКП |
||
К АРМ |
|
|
|
|
устройств телемеханики, объединяю |
|
диспетчера |
|
|
|
|
|
щих их каналов связи и протокола пе |
|
|
|
|
|
|
редачи телемеханических сообщений |
Условные обозначения: |
|
|
|
|
[1]. Общая структура ТмС показана на |
|
УПУ — устройство пункта управления; АРМ — автоматизированное рабочее место; |
рис. 1, где УПУ – устройство пункта |
|||||
УКП — устройства контролируемых пунктов. |
|
|
управления, подключаемое к автома |
|||
6 Рис. 1. Общая структура телемеханической сети |
|
|
||||
|
|
тизированному рабочему месту (АРМ) |
||||
www.cta.ru |
|
|
|
|
|
СТА 1/2006 |
|
|
|
|
|
© 2006, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru |
|
С И С Т Е М Н А Я И Н Т Е Г Р А Ц И Я / Р А С П Р Е Д Е Л Ё Н Н Ы Е С И С Т Е М Ы У П Р А В Л Е Н И Я
диспетчера, а УКП – устройства кон |
|
|
|
|
|
|
|
Таблица 1 |
|
||||
тролируемых пунктов, обеспечиваю |
Уровни укрупнённой модели взаимодействия открытых систем и соответствующие стандарты |
|
|||||||||||
щих либо непосредственное взаимо |
|
|
|
|
|
|
|
|
|
|
|
||
действие с объектом (УКП терминаль |
Уровень |
Наименования |
|
|
Определяющие |
Предмет стандартизации |
|
|
|
||||
уровней |
|
|
|
|
стандарты |
|
|
|
|||||
ное), либо через некоторое устройство |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
ГОСТ Р МЭК 870 5 5 |
Протоколы передачи |
|
|
|
|||||
связи с объектом (УКП интерфейс |
|
|
|
|
|
|
|
||||||
|
|
|
|
Основные прикладные функции |
|
|
|
||||||
|
Пользовательский |
|
|
|
|
|
|
|
|||||
ное), реализованное на базе програм |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Протоколы передачи |
|
|
|
|||||
|
(уровень SCADA, |
|
|
|
|
|
|
|
|||||
мируемого контроллера с набором мо |
7 |
|
ГОСТ Р МЭК 870 5 4 |
Определение и кодирование элементов |
|
|
|||||||
драйвера или |
|
|
|
||||||||||
|
|
|
|
|
пользовательской информации |
|
|
|
|||||
дулей ввода вывода. |
|
|
OPC сервера) |
|
|
|
|
|
|
|
|||
|
|
|
ГОСТ Р МЭК 870 5 3 |
Протоколы передачи |
|
|
|
||||||
В настоящее время в создаваемых |
|
|
|
|
|
|
|
||||||
|
|
|
|
Общая структура данных пользователя |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
системах управления территориально |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
ГОСТ Р МЭК 870 5 2 |
Протоколы передачи |
|
|
|
|||||
рассредоточенными (пространственно |
|
|
|
|
Процедуры в каналах передачи |
|
|
|
|||||
2 |
Канальный |
|
|
|
|
|
|
|
|||||
распределёнными) технологическими |
|
ГОСТ Р МЭК 870 5 1 |
Протоколы передачи |
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
Форматы кадров передачи |
|
|
|
||||||
процессами широко используются раз |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
Физический |
По типу канала связи |
Состав и уровни электрических сигналов |
|
|
||||||||
личные промышленные шины. Прин |
|
|
|||||||||||
ципиальное отличие ТмС от сетей на |
|
|
|
|
|
|
|
|
|
|
|
||
вия открытых систем в соответствии с |
|
|
|
|
|||||||||
базе промышленных шин состоит в |
лемеханических сообщений и форма |
|
|||||||||||
том, что УКП подключаются к УПУ с |
табл. 1. |
|
|
|
|
|
|
ты кадров телемеханического сигнала. |
|
||||
использованием протяжённых каналов |
Уже общепринято, что прикладное |
Процедуры определяются 3 классами: |
|
||||||||||
связи разнообразных конфигураций, в |
программное обеспечение АРМ дис |
S1 – посылка без ответа (циклическая |
|
||||||||||
которых километрами измеряется рас |
петчера |
разрабатывается |
инструмен |
передача), S2 – посылка с подтвер |
|
||||||||
стояние не только между УПУ и УКП, |
тальными средствами SCADA, следо |
ждением приёма (передача при изме |
|
||||||||||
но и между отдельными УКП. Такие ка |
вательно, поддержка работы ТмС на |
нении состояния, спорадическая пе |
|
||||||||||
налы связи характеризуются узкой по |
уровне АРМ диспетчера должна осу |
редача), S3 – запрос/ответ (передача |
|
||||||||||
лосой пропускания и, следовательно, |
ществляться в SCADA среде. Для этого |
по запросу). Определены 4 формата |
|
||||||||||
низкой скоростью передачи сигнала в |
нужен либо драйвер, написанный для |
кадров телемеханических сообщений |
|
||||||||||
условиях активного воздействия внеш |
конкретной SCADA, либо ОРС сервер, |
(FT1.1, FT1.2, FT2, FT3), предназна |
|
||||||||||
них помех. Причём каналы связи ТмС, |
предназначенный для тех SCADA, ко |
ченных для передачи данных различ |
|
||||||||||
как правило, находятся вне зоны адми |
торые поддерживают ОРС техноло |
ного объёма и с разным уровнем дос |
|
||||||||||
нистративной ответственности пред |
гию. На данном пользовательском уров |
товерности [2]. Поскольку для телеме |
|
||||||||||
приятия, создающего АСУ ТП, и по |
не стандартами определяются принци |
ханических систем показатель досто |
|
||||||||||
этому возможности их конструктивной |
пы описания ТмС в виде: |
|
|
|
верности имеет особое значение, то в |
|
|||||||
защиты от воздействия помех отсутст |
● блока |
пользовательских |
данных, |
ГОСТ Р МЭК 870 5 1 приведены гра |
|
||||||||
вуют. Тем не менее в указанных услови |
включающего в себя идентификатор |
фики, устанавливающие зависимость |
|
||||||||||
ях характеристики ТмС должны гаран |
блока данных и объект информации |
вероятности появления необнаружен |
|
||||||||||
тировать нормированное время переда |
(идентификатором блока данных в |
ной ошибки в телемеханическом со |
|
||||||||||
чи аварийного сообщения, нормиро |
общем случае определяется тип бло |
общении от характеристики |
канала |
|
|||||||||
ванное время отклика на команду |
ка данных, длина блока и причина |
связи, определяемой вероятностью |
|
||||||||||
управления, а также высокую степень |
передачи, а объект информации оп |
искажения бита. Отметим, например, |
|
||||||||||
системной |
достоверности, |
обеспечи |
ределяется типом и адресом объекта |
что вероятность появления необнару |
|
||||||||
вающую в реальном времени идентич |
информации, набором |
элементов |
женной ошибки не выйдет за 10–12 для |
|
|||||||||
ность физического состояния перемен |
информации и при необходимости |
формата FT1.2 с фиксированной дли |
|
||||||||||
ных процесса и их представления в |
временной отметкой); |
|
|
|
ной кадра при вероятности искажения |
|
|||||||
АРМ диспетчера. |
|
● требований к содержанию и форма |
бита в канале связи до 10–4, а для фор |
|
|||||||||
Отмеченные и другие особенности |
там представления элементов инфор |
мата FT3 с короткой и фиксирован |
|
||||||||||
проектирования и эксплуатации ТмС, |
мации (целое число без знака, целое |
ной длиной кадра – при вероятности |
|
||||||||||
по нашему мнению, подтверждают не |
число со знаком, число без знака с |
искажения бита в канале связи до |
|
||||||||||
обходимость выделения устройств те |
фиксированной |
запятой, |
число с |
10–3. |
|
|
|
||||||
лемеханики в отдельный класс уст |
фиксированной |
запятой |
положи |
Согласно рис. 1 канальное описание |
|
||||||||
ройств автоматизации, для которого |
тельное или отрицательное, действи |
ТмС должно представляться на трёх |
|
||||||||||
остаются |
действующими |
«старые» |
тельное число с плавающей запятой, |
интерфейсных уровнях: АРМ диспет |
|
||||||||
стандарты ГОСТ 26.005 и ГОСТ 26.205, |
строка битов, строка байтов); |
чера – УПУ, УПУ – УКП, УКП (ин |
|
||||||||||
а также введена в употребление серия |
● основных прикладных |
функций |
терфейсное) – контроллер устройства |
|
|||||||||
«новых» международных |
стандартов |
(инициализация работы УКП, сбор |
связи с объектом. На каждом из этих |
|
|||||||||
ГОСТ Р МЭК 870, позволяющая ре |
данных при помощи опроса, цикли |
интерфейсных уровней каналы связи |
|
||||||||||
шать задачу обеспечения совместимо |
ческая передача данных, сбор дан |
могут иметь различные характеристи |
|
||||||||||
сти аппаратуры телемеханики различ |
ных о событиях, временная синхро |
ки, и, следовательно, для каждого |
|
||||||||||
ных производителей на принципах от |
низация, передача команд управле |
уровня может быть выбран наиболее |
|
||||||||||
крытых систем. |
|
ния, |
пересылка |
файлов, |
тестовые |
подходящий формат кадра. Поскольку |
|
||||||
Стандарты группы ГОСТ Р МЭК |
процедуры и другие функции). |
форматы кадров «однородны», то их |
|
||||||||||
870 5 позволяют описать ТмС на уров |
На канальном уровне в стандартах |
преобразования друг в друга трудности |
7 |
||||||||||
не укрупнённой модели взаимодейст |
определяются процедуры передачи те |
не представляют. |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СТА 1/2006 |
|
|
|
|
|
|
|
|
|
www.cta.ru |
|||
© 2006, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru

С И С Т Е М Н А Я И Н Т Е Г Р А Ц И Я / Р А С П Р Е Д Е Л Ё Н Н Ы Е С И С Т Е М Ы У П Р А В Л Е Н И Я
Таблица 2
Форматы кадров FT1.2 и FT3
Состав кадра |
Формат FT1.2 |
|
Формат FT3 |
||
Стартовые слова |
10h |
|
05h |
||
(заголовок кадра) |
|
64h |
|||
|
|
||||
|
БПД – 12 байт |
|
|
|
|
|
Структура байта: |
БПД – 12 байт |
|||
Блок пользовательских |
● стартовый бит, |
||||
Структура байта: |
|||||
данных (БПД) |
● 8 информационных битов, |
||||
8 информационных битов |
|||||
|
● бит паритета, |
||||
|
|
|
|
||
|
● стоповый бит |
|
|
|
|
Контрольная |
CS (1.2) |
|
|
Байт 1 |
|
последовательность |
|
CS (3) |
|
Байт 2 |
|
Слово окончания |
16h |
|
— |
||
|
|
|
|
|
|
Примечание. СS (1.2) – арифметическая сумма по модулю 256; CS (3) – 16 битовый полином с инверсией.
Физический уровень определяется ти пом выбранного канала связи и теми стандартными устройствами, с помо щью которых он реализуется: блоки линейных узлов, модемы различного назначения (телефонный, сотовый, ра дио, для линий электропередач), ра диостанции общепромышленного на значения.
ПРИНЦИП ПРОЕКТНОЙ
КОМПОНОВКИ
Создание АСУ ТП — это всегда еди ничное производство, поскольку даже в рамках одного технологического про
цесса разными предприятиями форми руются разные требования к объёму ав томатизации. Разрешение противоре чия между стремлением производст венного предприятия к ограничению номенклатуры выпускаемых устройств и индивидуальными требованиями за казчиков различных АСУ ТП наиболее эффективно осуществляется путём создания устройств с требуемыми функциональными возможностями
методом проектной компоновки, кото рый по существу реализует индустри альную технологию единичного производ ства. В этом случае требуемое устрой
8
ство создаётся на основании техниче ского задания (ТЗ), которое представ ляется проектной организацией (или разрабатывается в соответствии с тех ническими требованиями заказчика), а сдаётся заказчику на основании ре зультатов приёмочных испытаний, подтверждающих соответствие изго товленного устройства требованиям ТЗ.
От опытно конструкторских разра боток проектная компоновка отлича ется тем, что устройство с требуемым набором функций создаётся из «кир пичиков» с гарантированными техни ческими характеристиками в опре делённых условиях их эксплуатации и в пределах «поддерживающих» возмож ностей прикладного программного обеспечения. Состав технических средств «кирпичиков», которые допус каются для использования в проектной компоновке, реально всегда ограни чен. Нами такой базовый набор техни ческих средств определяется как суб комплекс телемеханики (СК), ориен тированный на решение определённо го класса задач. Меняется базовая со вокупность технических и программ ных средств – вводится понятие ново го СК.
При создании АСУ ТП технология проектной компоновки телемеханиче ских устройств на базе СК для проект ной организации удобна тем, что, зная состав средств СК, проектировщик мо жет указать в проектной документации все вводы и выводы сигналов, разрабо тать схемы подключения средств изме рения, сигнализации, управления и сбора данных. И уже на основании принятых проектных решений форму лируется ТЗ на проектную компоновку требуемого устройства телемеханики.
В процессе проектной компоновки разрабатывается конструкторская и эксплуатационная документация, включая программу и методику приёмочных испытаний при выпуске изделия из производства и по заверше нии наладки на объекте, решаются во просы организации гарантийного об служивания и технической поддержки после окончания срока гарантии. При создании измерительных систем кана лы ввода аналоговых сигналов только калибруются, так как в законченном виде система реализуется только вме сте с каналами связи непосредственно на объекте. В этом случае система как изделие единичного производства должна быть подвергнута испытаниям
www.cta.ru |
СТА 1/2006 |
© 2006, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru
|
|
|
С И С Т Е М Н А Я И Н Т Е Г Р А Ц И Я / Р А С П Р Е Д Е Л Ё Н Н Ы Е С И С Т Е М Ы У П Р А В Л Е Н И Я |
|
|||
в качестве средства измерения с целью |
12 В |
|
|
|
|
||
утверждения типа средства измерения. |
|
|
ББП (AC/DC) |
|
|||
|
|
|
|
||||
В данной статье рассмотрены три ти |
|
|
|
|
|||
|
KT P.3.11 |
|
|
|
|||
па СК, ориентированных на решение |
Приёмопередатчик |
|
|
|
|||
|
ISA |
|
|
||||
задач автоматизации объектов тепло , |
|
|
|
||||
|
|
|
|
||||
|
KT P.3.11 |
|
|
||||
водо и электроснабжения. Требование |
Приёмопередатчик |
|
|
||||
|
|
|
|
||||
по обеспечению IBM РС совместимо |
|
FDM |
|
DC/DC |
|
||
сти предопределило выбор для этих СК |
|
|
|
преобразователь |
|
||
базовой |
совокупности |
технических |
RS 232/RS 485 |
CPU188 5BS |
|
|
|
средств, |
объединяемых |
технологией |
|
|
|||
|
|
|
|
||||
RS 232/RS 485 |
|
|
|
|
|||
MicroPC. Эти средства были примене |
|
|
|
|
|||
ны с учётом изложенных в [3] рекомен |
|
|
|
|
|
||
даций по минимизации стоимости ка |
Условные обозначения: |
|
|
|
|
||
налов ввода вывода. Специфика теле |
CPU188 5BS — микроконтроллер; FDM — модуль флэш диска; ББП — блок бесперебойного питания; |
|
|||||
механики учтена при создании кон |
КТ Р.3.11 — контроллер телемеханический. |
|
|
|
|||
|
|
|
|
|
|||
троллера телемеханического типа КТ |
Рис. 2. Структура СК*ПУ |
|
|
|
|
||
Р.3.11, который выполнен в формате |
|
|
|
|
|
||
MicroPC и вместе с комплектом радио |
по факту изменения состояний сиг |
● оболочку OPC интерфейсов; |
|
||||
станции (приёмопередатчик, блок пи |
нализации, а также по результатам |
● сетевую коммуникацию экземпля |
|
||||
тания, антенна с кабелем, грозозащит |
контроля измеряемых величин от |
ров программы через WinSocket; |
|
||||
ное устройство) является элементом |
носительно минимального и макси |
● поток вывода отладочной информа |
|
||||
телемеханической сети с радиоканалом |
мального значений уставок рабочей |
ции в окно, файл и т.п.; |
|
||||
связи. |
|
|
зоны (S2 — «посылка с подтвержде |
● единый пользовательский интер |
|
||
Из трёх СК один предназначен для |
нием приёма»; сообщения переда |
фейс; |
|
|
|||
проектирования УПУ (СК ПУ), а |
ются N повторами в M сериях, пре |
● экспорт ряда функций общего при |
|
||||
два — для проектирования УКП: СК |
дусмотрен механизм защиты от по |
менения. |
|
|
|||
ТМ – для решения задач телемехани |
тери сообщений при одновремен |
Для работы систем диспетчеризации |
|
||||
ки, СК ТА – для решения задач теле |
ном выходе в эфир двух и более |
с OPC сервером необходима его на |
|
||||
автоматики. |
|
УКП); |
|
стройка для использования опре |
|
||
Для СК выбраны два формата кадра |
● спорадическими передачами низко |
делённого коммуникационного уст |
|
||||
сообщения по ГОСТ Р МЭК 870 5 1: |
приоритетных сообщений из УКП |
ройства (KTRPorts.INI). В настоящее |
|
||||
FT1.2, обеспечивающий защиту с ми |
по заданной временной уставке или в |
время сервер поддерживает передачу |
|
||||
нимальным кодовым расстоянием d=4 |
соответствии с амплитудной дискре |
данных по радиоканалу через контрол |
|
||||
при взаимодействии ТмС с АРМ дис |
тизацией параметров контролируе |
лер, подключаемый к последователь |
|
||||
петчера, и FT3, обеспечивающий за |
мого процесса (S1 — «посылка без |
ным портам (RS 232) компьютера. |
|
||||
щиту с минимальным кодовым рас |
ответа»). |
|
Формат передачи данных в канале |
|
|||
стоянием d=6 при передаче сообщений |
Интерфейс связи АРМ диспетчера с |
RS 232 соответствует FT1.2. Настрой |
|
||||
в радиоканале связи, в котором сигнал |
радиотелемеханической сетью реали |
ки коммуникационных устройств хра |
|
||||
подвержен активному воздействию по |
зован в виде ОРС сервера. В качестве |
нятся в файле KTRPorts.INI установоч |
|
||||
мех. Форматы кадров FT1.2 и FT3 |
HAL (Hardware Abstraction Level — уро |
ного каталога программы. Настройки |
|
||||
представлены в табл. 2 [1]. В формате |
вень аппаратной абстракции) исполь |
объектов диспетчеризации хранятся в |
|
||||
FT1.2 кадр сообщения |
обрамляется |
зуется класс Item. С одной стороны, |
файле KoratObj.INI установочного ка |
|
|||
байтами заголовка (10h) и окончания |
Item связан непосредственно с аппа |
талога программы; объекты, опре |
|
||||
(16h), а в формате FT3 задаются только |
ратным или логическим |
источником |
делённые в этом файле, включаются в |
|
|||
два байта заголовка: 05h, 64h. Кон |
данных, позволяя приложениям поль |
алгоритм опроса системой. Содержи |
|
||||
трольная последовательность CS (1.2) |
зователям (техпроцессам), владеющим |
мое этих файлов должно изменяться |
|
||||
представляется байтом |
арифметиче |
Item, не заботиться об аппаратуре и |
специалистами. |
|
|
||
ской суммы по модулю 256, а CS (3) — |
одинаково работать с разными физиче |
|
|
|
|||
двумя байтами циклического кода с |
скими и логическими устройствами. С |
СУБКОМПЛЕКС УСТРОЙСТВ |
|
||||
инверсией всех 16 контрольных битов. |
другой стороны, внутренние свойства |
ПУНКТА УПРАВЛЕНИЯ |
|
||||
В радиоканале связи |
реализуется |
Item направлены на автоматическую |
(СК ПУ) |
|
|
||
множественный доступ с прослушива |
поддержку OPC ориентированной дис |
Проектная компоновка УПУ осуще |
|
||||
нием несущей, а процедуры передачи |
петчеризации, ведение архивов и жур |
ствляется из технических средств СК |
|
||||
осуществляются: |
|
налов событий. |
|
ПУ, представленных на рис. 2: модуля |
|
||
● адресным запросом УКП по инициа |
OPC сервер NTComm состоит из |
микроконтроллера |
CPU188 5BS |
|
|||
тиве диспетчера, реализуемым по за |
двух взаимозависимых компонентов: |
(Fastwel), модуля флэш диска FDM |
|
||||
данной программе или циклически с |
выполняемого модуля NTComm.exe и |
(Fastwel) и контроллеров телемехани |
|
||||
заданным значением периода (S3 — |
набора сменных модулей |
поддержки |
ческих типа КТ Р.3.11. Все эти устрой |
|
|||
«запрос ответ с запрошенными дан |
устройств – динамических библиотек |
ства выполнены в формате MicroPC. |
|
||||
ными»); |
|
(dll). |
|
Программные средства работают под |
|
||
● спорадической передачей высоко |
Выполняемый модуль NTComm.exe |
DOS и включают в себя драйвер КТ |
9 |
||||
приоритетных сообщений из УКП |
обеспечивает и поддерживает: |
Р.3.11, драйвер сопряжения с персо |
|||||
СТА 1/2006 |
www.cta.ru |
© 2006, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru

С И С Т Е М Н А Я И Н Т Е Г Р А Ц И Я / Р А С П Р Е Д Е Л Ё Н Н Ы Е С И С Т Е М Ы У П Р А В Л Е Н И Я
Рис. 3. Внешний вид платы контроллера
телемеханического КТ*Р.3.11, выполненной
в формате MicroPC
нальным компьютером АРМ диспетче ра по каналу последовательной связи (RS 232/RS 485) в формате FT1.2, под программу организации циклических опросов и подпрограмму ведения архи вов на флэш диске.
Основой СК ПУ является микро контроллер CPU188 5BS. Работа в ТмС поддерживается контроллером телеме ханическим КТ Р.3.11 (рис. 3), реали зующим приём передачу сообщений в формате FT3, и приёмопередатчиком радиостанции.
В общем случае на шину ISA может быть установлено несколько КТ Р.3.11, при этом каждый из них может обслу живать ТмС, работающую на «своей» радиочастоте. Питание СК ПУ осуще ствляется от блока бесперебойного пи тания ББП (выходное напряжение 12 В постоянного тока, ток нагрузки до 20 А) с аккумуляторной батареей ёмко стью 12 А·ч. Причём питание приёмо передатчика радиостанции осуществ ляется от ББП непосредственно, а уст ройств MicroPC – через специальную плату с набором DC/DC преобразова телей. Два канала последовательной связи CPU188 5BS обеспечивают воз можность доступа к ТмС двум АРМ диспетчеров или АРМ диспетчера и АРМ сервисной службы. Наличие гальванически изолированного канала RS 485 позволяет удалять СК ПУ от АРМ на расстояние до 1200 м. Такая необходимость может диктоваться, на пример, выбором удалённого места для монтажа антенны, из которого лучше обеспечивается радиовидимость объ ектов АСУ ТП. Возможно подключе ние к одному из последовательных ка налов GSM модема как дополнитель ного канала связи с объектами или промышленной шины с протоколом RS 485 для обслуживания функцио нальных контроллеров на тех пунктах
10 управления, на которых дополнитель
|
|
|
ББП |
|
24 В (питание TBI, IMD) |
Вводы |
Ввод 1 |
БСВ |
|
|
|
сетевого |
Ввод 2 |
ББП |
|
Радиостанция |
|
питания |
|
|
|||
|
|
|
|
Антенна |
|
|
|
|
|
|
|
|
DC/DC |
5 В, ±12 В |
|
Блок MicroPC |
|
|
|
|
|||
преобразователь |
|
||||
|
|
|
|||
|
|
5 В |
AIMUX |
TBI |
IMD |
|
|
|
|||
|
24 В (бесперебойное |
|
TBI |
IMD |
|
|
питание TBI, IMD) |
|
|
|
|
|
|
|
AI |
DI |
DO |
Условные обозначения: |
|
|
|
|
|
БСВ — блок сетевого ввода с автоматическим включением резерва и контролем напряжения на |
|||||
вводах; ББП — блок бесперебойного питания (12 В постоянного тока); БП — блок питания |
|||||
(«обычное питание»); AIMUX — плата мультиплексора; TBI — плата ввода дискретных сигналов; |
|||||
IMD — плата релейного вывода; AI — аналоговый вход (аналоговые сигналы); DI — дискретный |
|||||
вход (дискретные сигналы); DO — дискретный выход (команды управления). |
|||||
Рис. 4. Блок*схема одного из проектных решений построения СК*ТМ
Таблица 3
Базовый состав аппаратных средств СК*ТМ
Наименование изделия |
Обозначение |
|
|
Модуль микроконтроллера |
CPU188 5MX |
|
|
Модуль ввода вывода |
UNIO96 1 |
|
|
Модуль ввода вывода |
UNIO96 5 |
|
|
Контроллер телемеханический |
КТ Р.3.11 |
|
|
Модуль флэш диска |
FDM |
|
|
Плата мультиплексора |
AIMUX 32 |
|
|
Плата ввода дискретных сигналов |
TBI 24/0 |
|
|
Плата вывода дискретных сигналов |
TBI 0/24 |
|
|
Плата ввода вывода |
TBI 16/8 |
|
|
Плата релейной коммутации |
TBR 8 |
|
|
Плата релейных выходов |
IMD 24O |
|
|
Плата клеммная |
TBI 24LC |
|
|
но решаются задачи локального сбора |
по выводу информации на ЖК дисплей |
|||
информации и управления. |
и вводу информации с матричной кла |
|||
Применение СК ПУ представляет |
виатуры. |
|||
интерес |
с |
позиции автономного |
|
|
управления циклическими опросами |
СУБКОМПЛЕКС |
|||
УКП, так как эта задача «трудно» ре |
ТЕЛЕМЕХАНИКИ (СК ТМ) |
|||
шается некоторыми SCADА. Про |
СК ТМ предназначен для проектной |
|||
граммное обеспечение СК ПУ позво |
компоновки УКП, в которых взаимо |
|||
ляет задавать различные периоды цик |
действие с объектом выполняется на |
|||
лических опросов, вести архивы ре |
уровне телемеханических функций: те |
|||
зультатов таких опросов и архивы ава |
леизмерения (ТИ), телесигнализации |
|||
рийных сообщений в модуле флэш |
(ТС), телеконтроля (ТК), телеуправле |
|||
диска |
FDM |
ёмкостью |
от 8 до |
ния двухпозиционного (ТУ). |
32 Мбайт. В этом случае СК ПУ пред |
Базовый состав аппаратных средств |
|||
ставляется автономным устройством, |
СК ТМ представлен в табл. 3. Микро |
|||
к которому в некоторых системах |
контроллер СPU188 5МХ является об |
|||
АРМ диспетчера может |
обращаться |
разующим: с его использованием соз |
||
периодически, по мере необходимо |
даются все проектные конфигурации. |
|||
сти обновления данных. |
|
Состав других средств может расши |
||
По требованию заказчика могут быть |
ряться по мере отработки новых техни |
|||
реализованы возможности CPU188 5BS |
ческих решений. Объём телемеханиче |
|||
www.cta.ru |
СТА 1/2006 |
© 2006, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru

С И С Т Е М Н А Я И Н Т Е Г Р А Ц И Я / Р А С П Р Е Д Е Л Ё Н Н Ы Е С И С Т Е М Ы У П Р А В Л Е Н И Я
|
|
|
управления. В про |
условий эксплуатации «поднимается» |
||||
|
|
|
ектном |
решении |
до минус 10°C, то для более жёстких |
|||
|
|
|
средства |
MicroPC |
условий в корпусе шкафа между задней |
|||
|
|
|
дополняются ком |
стенкой и монтажной плоскостью пре |
||||
|
|
|
плектом |
оборудо |
дусмотрена установка нагревательной |
|||
|
|
|
вания |
радиостан |
панели неметаллического типа, управ |
|||
|
|
|
ции с ББП (выход |
ление которой осуществляется контак |
||||
|
|
|
ное |
напряжение |
тами датчика реле температуры. |
|||
|
|
|
12 В |
постоянного |
Работа СК ТМ управляется при |
|||
|
|
|
тока) и блоком се |
кладной |
программой |
телемеханики |
||
|
|
|
тевого ввода (БСВ) |
(ППТ), |
выполняющейся под DOS. |
|||
|
|
|
с автоматическим |
ППТ осуществляет взаимодействие с |
||||
|
|
|
включением резер |
ТмС на уровне команд: запись данных, |
||||
|
|
|
ва и контролем на |
чтение данных, спорадическая переда |
||||
|
|
|
пряжения |
на вво |
ча аварийного телемеханического со |
|||
|
|
|
дах. Блок схема од |
общения (N повторами в M сериях), |
||||
Рис. 5. Шкаф с оборудованием субкомплекса телемеханики СК*ТМ |
ного из таких про |
спорадическая передача телемехани |
||||||
|
|
|
ектных |
решений |
ческого сообщения по временной ус |
|||
ских функций, поддерживаемых |
представлена на рис. 4. |
|
|
тавке (однократно). Типы телемехани |
||||
СК ТМ: ТИ – от 8 до 96, ТК – от 16 до |
Подобные СК ТМ (рис. 5) установ |
ческих |
сообщений |
определяются |
||||
192, ТС – от 16 до 136 (в том числе ТИ |
лены на распределительных трансфор |
идентификаторами типа сообщения |
||||||
интегральных – до 32), ТУ – до 120. |
маторных |
подстанциях |
Химкинских |
(ИТС) [1]. Результаты измерения ана |
||||
Количество каналов передачи данных |
районных |
распределительных элек |
логовых сигналов (AI) в зависимости |
|||||
(RS 232/RS 485) – 2. |
тросетей Мосэнерго и Магнитогор |
от ИТС представляются в трёх форма |
||||||
В табл. 3 различаются два типа тех |
ских городских электрических сетей. |
тах двоичного кода: 8 битов без знака, |
||||||
нических средств: модули, устанавли |
Всё оборудование СК ТМ размещает |
7 битов и знак, 11 битов и знак. Осуще |
||||||
ваемые в каркас MicroPC, и платы |
ся в корпусе шкафа фирмы Schroff с |
ствляется автоматический контроль |
||||||
функциональные с клеммами WAGO, |
габаритными |
|
размерами |
результатов измерений относительно |
||||
предназначенные для непосредствен |
800×600×220 мм и степенью защиты |
уставок минимального и максималь |
||||||
ного подключения линий связи с дат |
IP66. Поскольку |
при использовании |
ного значений рабочей зоны с актив |
|||||
чиками, сигнализаторами, средствами |
ББП нижний температурный предел |
ной сигнализацией. Каналы ввода |
||||||
11
СТА 1/2006 |
www.cta.ru |
© 2006, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru

С И С Т Е М Н А Я И Н Т Е Г Р А Ц И Я / Р А С П Р Е Д Е Л Ё Н Н Ы Е С И С Т Е М Ы У П Р А В Л Е Н И Я
Рис. 6. Внешний вид одного из вариантов
исполнения аппаратной части СК*ТА
дискретных сигналов (DI) могут вы полнять как функцию сигнализации, так и функцию интегрального измере ния (счёта импульсов). Номинально все каналы сигнализации активные, то есть изменение состояния сигнала вы зывает спорадическую передачу сооб щения. Изменение режима работы ка нала DI с активного на пассивный осу ществляется программным маскиро ванием, и в этом случае изменение со стояния DI может быть установлено только опросом. Результаты инте грального измерения могут представ ляться в 2 байтовом формате (счёт им пульсов на заданном временном ин тервале) или в 4 байтовом формате (счёт импульсов от момента ввода ка нала в эксплуатацию). Команды управления DO формируются в виде импульсного воздействия, длитель ность которого программируется от 1 до 60 с (дискретность 0,25 с) или до факта изменения состояния DI, адрес которого указан в телемеханическом сообщении (но не более 60 с). Естест венно, что в соответствии с общими техническими условиями на устройст ва телемеханики (ГОСТ 26.205) в каж дый момент времени СК ТМ может исполнять только одну команду управ ления DO. Каналы дискретных сигна лов представлены двумя типами: с бес перебойным питанием и с обычным питанием. Такой подход позволяет со хранить контроль за рядом сигнализа ций (охранная, пожарная, загазован ность, затопление и др.) при аварий
12 ном отключении электроэнергии как
|
|
Плата |
|
|
БР 3.22 |
|
|
Микроконтроллер |
ТИТ1 |
|
6040 |
Мультиплексор |
Модули |
|
… |
SCM7B41 |
|
ТИТ32 |
AIMUX 32 |
|
|
|
|
|
|
Элементы |
|
|
гальванической |
|
|
развязки |
Рис. 7. Организация каналов ввода аналоговых сигналов в СК*ТА |
||
по основному, так и по резервному вводам.
Каналы последовательной связи предназначены для внешнего подклю чения узлов коммерческого учёта, уст ройств контроля и управления с помо щью промышленных шин. Резервиру ется возможность подключения СК ТМ к GSM модему.
СУБКОМПЛЕКС ТЕЛЕАВТОМАТИКИ (СК ТА)
Проектная компоновка CК ТА реко мендуется для комплексного решения двух задач: телемеханики и локальной автоматики, осуществляющей двухпо зиционное управление исполнитель ными механизмами по заданной про грамме и/или автоматическое регули рование в контурах управления выход ными величинами по заданным зако нам. Принципиальное отличие СК ТА от СК ТМ состоит в том, что СК ТМ – это закрытое устройство, которое по зволяет пользователю только коррек тировать настройки функций телеме ханики, а СК ТА – это программно технический комплекс на базе Micro TRACE MODE 4.20, ориентированный на возможность развития пользовате лем.
СК ТА главным образом ориентиро ваны на предприятия тепловых сетей. С 1998 года они последовательно уста навливаются на котельных и централь ных тепловых пунктах Красногорских
тепловых сетей Московской области [4]. Внешний вид одного из вариантов исполнения аппаратной части СК ТА показан на рис. 6.
Базовый состав аппаратных средств СК ТА представлен в табл. 4. Микро контроллер 6040 фирмы Octagon Systems является образующим: с его использованием создаются все проект ные конфигурации для следующих объёмов телемеханических функций: ТИ – от 8 до 64, ТК – от 16 до 128, ТС – до 128, ТУ – до 64. Количество каналов передачи данных (RS 232/ RS 485) – 2.
Ядро СК ТА реализуется в каркасе MicroPC с блоком питания 5101 (Octagon Systems), с модулями ввода вывода 5600 (Octagon Systems), а также с контроллером телемеханическим КТ Р.3.11, который через радиостанцию поддерживает работу в составе ТмС. Сопряжение со средствами измерения, сигнализации и управления осуществ ляется с использованием аппаратных средств как фирмы Octagon Systems (плата МРВ 24 с модулями Grayhill), так и фирмы Fastwel (платы AIMUX 32, TBI 24/0, TBI 0/24, TBR 8).
Известно, что в микроконтроллере 6040 каналы аналогового ввода не име ют гальванической развязки. Поэтому в СК ТА гальваническая развязка ана логовых каналов микроконтроллера 6040 и мультиплексора AIMUX 32 (рис. 7) реализована с использованием
Таблица 4
Базовый состав аппаратных средств СК*ТА
Наименование изделия |
Обозначение |
|
|
Модуль микроконтроллера |
6040 |
|
|
Модуль ввода вывода |
5600 |
|
|
Контроллер телемеханический |
КТ Р.3.11 |
|
|
Плата мультиплексора |
AIMUX 32 |
|
|
Плата ввода дискретных сигналов |
TBI 24/0 |
|
|
Плата вывода дискретных сигналов |
TBI 0/24 |
|
|
Плата релейной коммутации |
TBR 8 |
|
|
Плата модулей оптической изоляции |
МРВ 24 |
|
|
www.cta.ru |
СТА 1/2006 |
© 2006, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru

С И С Т Е М Н А Я И Н Т Е Г Р А Ц И Я / Р А С П Р Е Д Е Л Ё Н Н Ы Е С И С Т Е М Ы У П Р А В Л Е Н И Я
элементов SCM7В41 04A фирмы |
зоны с использованием механизма |
для проектных организаций и систем |
|
Dataforth, а дискретных каналов управ |
апертуры (в диапазоне от 0,4 до 5%) и |
ных интеграторов. ● |
|
ления работой мультиплексора — с ис |
спорадической передачи телемеха |
|
|
пользованием специальной платы БР |
нического сообщения низкого при |
ЛИТЕРАТУРА |
|
3.22, от которой, помимо этого, через |
оритетного уровня; |
1. Сумительнов В.Н. Радиотелемеханиче |
|
DC/DC преобразователь осуществля |
● ввода дискретных сигналов с анти |
ская сеть комплекса «Корат» // Промыш |
|
ется питание AIMUX 32. |
дребезговой защитой; |
ленные АСУ и контроллеры. 2002. № 7. |
|
Организация каналов ввода дискрет |
● активной сигнализации изменения |
С. 28 31. |
|
ных сигналов аналогична тому, как это |
состояния входных сигналов посред |
2. Митюшкин К.Г. Телеконтроль и теле |
|
сделано в СК ТМ, а вывод дискретных |
ством спорадической передачи сооб |
управление в энергосистемах. — М. : |
|
сигналов в отличие от СК ТМ осущест |
щения высокого приоритета; |
Энергоатомиздат, 1990. |
|
вляется как в импульсной, так и в сту |
● вывода дискретных сигналов двухпо |
3. Кашин М., Корнеев К. Средства автома |
|
пенчатой формах и в виде широтно им |
зиционного управления в виде им |
тизации, совместимые с продукцией |
|
пульсного воздействия. Поэтому в |
пульса или ступенчатого воздейст |
фирмы Octagon Systems // Современные |
|
СК ТА нет ограничения на количество |
вия; |
технологии автоматизации. 1998. № 4. |
|
одновременно выполняемых команд |
● реализации законов ПИД регулиро |
С. 6 12. |
|
управления. В тех случаях когда в каче |
вания в 4 контурах. |
4. Сумительнов В.Н., Агрес Е.Л. Опыт соз |
|
стве выходных элементов ступенчатого |
|
дания, эксплуатации и перспективы раз |
|
управления в цепях переменного тока с |
ЗАКЛЮЧЕНИЕ |
вития АСУ теплоснабжением ОАО «Крас |
|
индуктивной нагрузкой используются |
В данной статье показаны варианты |
ногорская теплосеть» // Промышленные |
|
элементы Grayhill, устанавливаются за |
решения задач создания территориаль |
АСУ и контроллеры. 2004. № 7. С. 15 19. |
|
щитные фильтры, входящие в состав |
но рассредоточенных АСУ ТП на уров |
|
|
дополнительных средств субкомплекса. |
не проектной компоновки средств |
Авторы — сотрудники |
|
Питание СК ТА осуществляется от |
MicroPC. Перспектива унификации |
ЗАО КТЦ «Автоматика |
|
источника бесперебойного питания, |
подобных технических решений нам |
и метрология», |
|
что позволяет передавать в радиоканал |
видится на пути активного использова |
телефон: (495) 993 4411, |
|
сообщения об аварийном отключении |
ния ГОСТ Р МЭК 870 5 1/2/3 и ОРС |
факс: (496 53) 675 21, |
|
основного и резервного вводов и со |
технологии для взаимодействия с раз |
и фирмы ПРОСОФТ, |
|
хранять контроль над охранной сигна |
личными SCADA. Все технические ре |
телефон: (495) 234 0635, |
|
лизацией, сигнализаторами загазован |
шения многократно апробированы, |
факс: (495) 234 0640, |
|
ности, пожарной опасности и других |
что позволяет нам рекомендовать их |
E mail: info@prosoft.ru |
|
аварийных состояний. |
|
|
|
СК ТА изготавливаются в металли |
|
|
|
ческих шкафах настенного крепления |
|
|
|
с габаритными размерами 800/1000/ |
|
|
|
1200×600×220/320 мм производства |
|
|
|
фирм Schroff или Rittal. |
|
|
|
Для решения задач телеавтоматики |
|
|
|
программные средства |
субкомплекса |
|
|
должны обеспечивать |
возможность |
|
|
программирования и отладки алгорит |
|
|
|
мов контроля, управления и регулиро |
|
|
|
вания с представлением результатов |
|
|
|
измерения величин в их истинной раз |
|
|
|
мерности. В эксплуатируемых СК ТА |
|
|
|
программные средства |
работают под |
|
|
управлением DOS и включают в свой состав монитор реального времени (МРВ), драйвер КТ Р.3.11 под МРВ и прикладную программу автоматизации конкретных объектов, разработанную средствами SCADA для выполнения следующих функций:
●автоматического сбора информации о состоянии объекта;
●контроля результатов каждого ТИ от носительно минимального и макси мального значений уставок рабочей зоны с высокоприоритетной актив ной сигнализацией о несоответствии;
●оперативного контроля результатов
измерения внутри заданной рабочей |
13 |
|
|
|
|
СТА 1/2006 |
www.cta.ru |
|
© 2006, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru