

itmo373
.pdfПередний фокальный отрезок SF – это расстояние от вершины передней поверхности до переднего фокуса.
Если f ′ > 0 , то система называется собирающей или положительной.
Если f ′ < 0, то система рассеивающая или отрицательная.
Переднее и заднее фокусные расстояния не являются абсолютно независимыми, они связаны между собой соотношением:
f ′ |
= − |
n′ |
|
(5.2.5) |
|
f |
n |
||||
|
|
||||
Выражение (5.2.5) можно переписать в виде:
|
|
|
|
f ′ |
|
= − |
|
|
f |
|
(5.2.6) |
||||||||||||||
|
|
|
|
n′ |
|
|
n |
||||||||||||||||||
|
|
|
|
|
|
f ′ |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
где |
|
|
– приведенное или эквивалентное фокусное расстояние. |
|||||||||||||||||||
|
n′ |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
В том случае, если оптическая система находится в однородной среде |
||||||||||||||||||||||
(например, |
в воздухе) n = n′, а переднее и заднее фокусные расстояния равны |
||||||||||||||||||||||||
по абсолютной величине |
|
|
f |
|
= |
|
f ′ |
|
. |
||||||||||||||||
|
|
|
|
||||||||||||||||||||||
|
|
|
Оптическая сила оптической системы: |
||||||||||||||||||||||
|
|
|
Φ = |
n′ |
|
= − |
n |
|
(5.2.7) |
||||||||||||||||
f ′ |
f |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Чем больше оптическая сила, тем сильнее оптическая система изменяет |
||||||||||||||||||||||
|
|
||||||||||||||||||||||||
ход лучей. Если Φ = 0 , то |
f ′= ∞ . |
||||||||||||||||||||||||
|
|
|
5.2.4. Построение изображений |
||||||||||||||||||||||
|
|
|
Найдем изображение |
|
|
′ |
|||||||||||||||||||
|
|
|
A точки A. Для этого необходимо построить хотя |
||||||||||||||||||||||
бы два вспомогательных луча, на пересечении которых и будет находиться точка A′ (рис.5.2.5). Вспомогательный луч 1 можно провести через точку A параллельно оптической оси. Тогда в пространстве изображений луч 1′ пройдет через задний фокус оптической системы. Вспомогательный луч 2 можно провести через точку A и передний фокус оптической системы. Тогда в пространстве изображений луч 2′ пойдет параллельно оптической оси. На пересечении лучей 1′ и 2′ будет находиться изображение точки A . Теперь в точке A′ пересекаются все лучи (1 - 2 - 3), выходящие из точки A.
70
H H′
A |
1 |
K1 |
|
|
2 |
3 |
|
|
K3 |
|
|
F |
K1′
|
|
|
|
|
|
|
|
|
|
1' F′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3′ |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
K2 K2′ |
2' |
|
|||||||||||||||||||
Рис.5.2.5. Построение изображения точки.
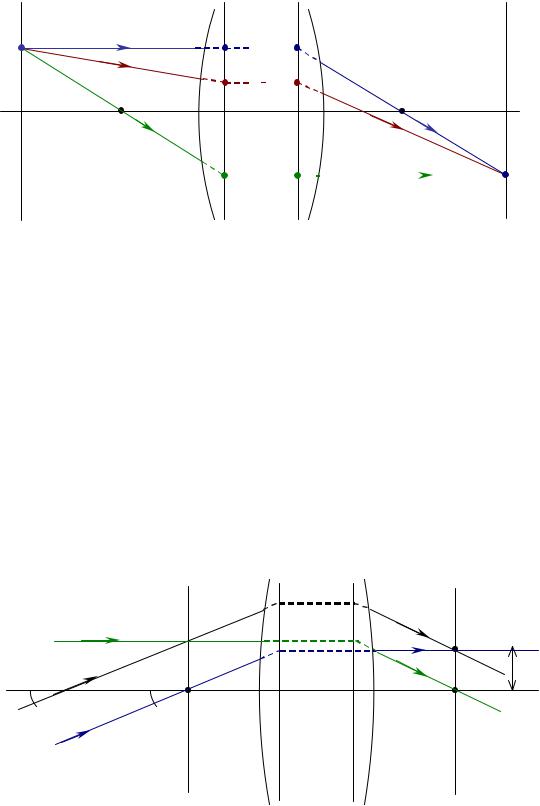
Построим теперь ход луча r (рис.5.2.6).
1 способ. Можно построить вспомогательный луч, параллельный данному и проходящий через передний фокус (луч 1). В пространстве изображений луч 1′ будет идти параллельно оптической оси. Так как лучи r и 1 параллельны в плоскости предметов, то в пространстве изображений они должны пересекаться в задней фокальной плоскости. Следовательно, луч r′ пройдет через точку пересечения луча 1′ и задней фокальной плоскости.
2 способ. Можно построить вспомогательный луч, идущий параллельно оптической оси и проходящий через точку пересечения луча r и передней фокальной плоскости (луч 2 ). Соответствующий ему луч в пространстве изображений (луч 2′) будет проходить через задний фокус. Так как лучи r и 2 пересекаются в передней фокальной плоскости, в пространстве изображений они должны быть параллельными. Следовательно, луч r′ пойдет параллельно лучу 2′.
|
n |
H |
H ′ |
n′ |
|
|
|
r′ |
|
|
2 |
|
1' |
′ |
|
|
|
A |
|
|
r |
|
2' |
y′ |
−ω |
−ω |
|
|
|
F |
|
F ′ |
||
|
|
|
|
|
|
1 |
|
|
|
|
Рис.5.2.6. Построение хода луча. |
|
||
5.3. Основные соотношения параксиальной оптики
Основные соотношения параксиальной оптики связывают между собой фокусные расстояния, положение и размеры предмета и изображения, угловое, линейное и продольное увеличения.
71

5.3.1. Вывод зависимости между положением и размером предмета и изображения
|
|
|
f' |
z' |
|
A |
|
K1 |
K1' |
|
|
|
2 |
1 |
3' |
|
|
|
|
|
|
||
y |
3 |
|
|
|
|
|
|
|
|
||
|
−α |
H |
H' |
α′ |
O' |
O |
F |
|
|
F' |
|
|
|
|
|
1' |
y′ |
|
|
K2 |
K2' |
2' |
A' |
|
- z |
|
|||
|
- f |
|
|
|
|
|
|
- a |
|
a' |
|
Рис.5.3.1. Схема для вывода основных соотношений параксиальной оптики.
Для вывода зависимости между положением и размером предмета и
изображения воспользуемся рис.5.3.1. OAF подобен |
FHK2 , следовательно: |
||||||||||||||||||||||||
|
|
|
|
y |
|
= |
|
|
|
− z |
, отсюда |
y′ |
= − |
|
f |
|
|
|
|
|
|||||
|
|
|
|
− y′ |
|
|
|
|
z |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
f ′ |
|
y |
|
|
|
|
|||||||||||
|
|
|
Тогда, в соответствии с выражением (5.2.1), линейное увеличение можно |
||||||||||||||||||||||
выразить следующим образом: |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
β = |
|
y′ |
= − |
f |
|
|
|
|
|
|
|
|
|
|
(5.3.1) |
||||||
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Аналогично, из |
|
|
|
|
|
′ |
′ |
′ |
′ ′ ′ |
|||||||||||||
|
|
|
подобия треугольников H K1F |
|
и F O A |
можно |
|||||||||||||||||||
получить выражение: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
β = − |
|
z′ |
|
|
|
|
|
|
|
|
|
|
(5.3.2) |
||||||||
|
|
|
|
|
|
f ′ |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Таким образом, увеличение можно выразить как через передние, так и |
||||||||||||||||||||||
через и задние отрезки. Отсюда можно получить формулу Ньютона: |
|
||||||||||||||||||||||||
|
|
|
|
z z′ = |
|
|
f f ′ |
|
|
|
|
|
|
|
|
|
(5.3.3) |
||||||||
|
|
|
Если |
|
|
оптическая |
система находится в однородной |
среде ( n = n′), то |
|||||||||||||||||
|
|
|
|
||||||||||||||||||||||
f = − f ′, и формула Ньютона получает вид: |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
z z′ = − f ′2 |
|
|
|
|
|
|
|
|
|
(5.3.4) |
|||||||||||
Выразим z и z′ через фокусные расстояния и передний (−a) и задний (a′) отрезки:
z′ = a′− f ′
72
z = a − f
Тогда выражение (5.3.3) можно записать в виде:
(a − f ) (a′− f ′)= f f ′
После преобразований получим выражение, связывающее фокусные расстояния и передний и задний отрезки (формула отрезков или формула Гаусса):
f ′ |
+ |
f |
=1 |
(5.3.5) |
||
a′ |
|
a |
||||
|
|
|
||||
5.3.2. Угловое увеличение и узловые точки
Теперь рассмотрим угловое увеличение, воспользовавшись снова рис.5.3.1. Из OK1H , видно, что:
tg(−α)= −ya =α , отсюда −α = −ya
Аналогично можно вывести выражение:
α′ = ay′
Теперь можно выразить угловое увеличение через соответствующие отрезки (а и а’, z и z’):
|
|
|
W = α′ |
= |
|
y a |
|
= |
a |
= |
f + z |
|
(5.3.6) |
||
y a′ |
|
f ′+ z′ |
|||||||||||||
|
|
|
|
α |
|
|
a′ |
|
|||||||
|
|
|
Выразим z′ из формулы Ньютона (5.3.3), |
тогда после преобразований |
|||||||||||
получим выражение для вычисления углового увеличения: |
|||||||||||||||
|
|
|
W = |
z |
= |
f |
|
|
|
|
|
|
(5.3.7) |
||
f ′ |
z′ |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Из выражения (5.3.7) следует, что если выбрать плоскости предмета и |
||||||||||||
|
|
||||||||||||||
изображения таким образом, что z = f ′ и z′= f , |
то в точках на оптической оси |
||||||||||||||
в пространстве предметов (изображений) угловое увеличение равно единице. Такие точки называются узловыми точками.
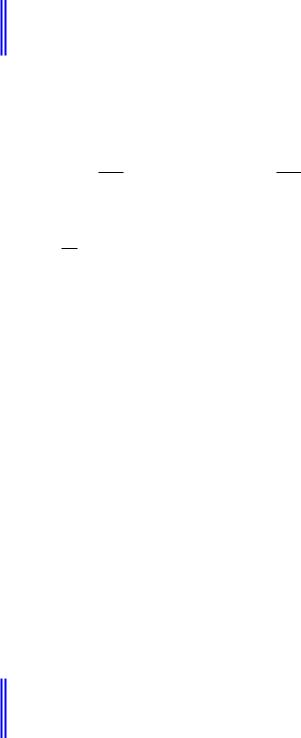
Чтобы найти узловые точки N и N ′, от переднего фокуса откладывается заднее фокусное расстояние, а от заднего фокуса откладывается переднее фокусное расстояние (рис.5.3.2). Отрезки NN ′ и HH ′ равны. Если − f ′= f ( n = n′), то узловые точки совпадают с главными точками.
Следствием выражений (5.3.2) и (5.3.7) является следующее соотношение:
β W = − |
f |
|
= |
n |
|
(5.3.8) |
|
f ′ |
n′ |
||||||
|
|
|
|||||
73

F |
−α |
N |
H |
H ′ f |
F′ |
|
f ′ |
N ′ |
α ′ |
|
|
|
|
|
|||
|
Рис.5.3.2. Узловые точки. |
||||
5.3.3. Частные случаи положения предмета и изображения
Рассмотрим различные положения предмета и изображения (различные z
и z′):
• |
z = − f . |
Тогда z′ = − f ′, линейное увеличение β =1, следовательно, |
||||||||
|
предмет и изображение – это главные плоскости. Угловое увеличение |
|||||||||
|
W = − |
f |
|
= |
n |
. |
|
|
|
|
|
f ′ |
|
|
|
|
|||||
|
|
|
n′ |
|
|
|
||||
• |
z = f ′. Тогда z′ = f , угловое увеличение W =1, следовательно, предмет |
|||||||||
|
и изображение – это узловые точки. Линейное увеличение β = − |
f |
= |
n |
. |
|||||
|
f ′ |
|
||||||||
|
|
|
|
|
|
|
|
n′ |
||
• |
z = f . Тогда z′ = f ′, линейное увеличение β = −1, угловое увеличение |
|||||||||
W = ff ′ = − nn′ , следовательно, предмет находится на двойном фокусном
расстоянии, то есть расстояние между предметом и изображением минимально.
• z = 0 . Тогда z′ = ∞, линейное увеличение β = −∞, угловое увеличение W = 0 , следовательно, предмет находится в переднем фокусе, а изображение – в бесконечности.
• z′ = 0 . |
Тогда z = −∞, линейное увеличение β = 0, |
угловое увеличение |
W = ∞, |
следовательно, предмет находится на |
бесконечности, а |
изображение – в заднем фокусе. |
|
|
5.3.4. Связь продольного увеличения с поперечным и угловым
А |
l |
A |
F |
F ′ |
А′ |
l′ |
A′ |
|
|
1 |
|
|
|
|
1 |
− z |
z1′ |
1 |
|
− z |
z′ |
Рис.5.3.3. Связь продольного увеличения с поперечным и угловым.
74

Рассмотрим рис.5.3.3. Длину отрезков l и l′ можно выразить следующим образом:
l = z1 − z l′ = z′− z1′
По определению продольного увеличения (5.2.4):
Q = l′ = z′− z1′ l z1 − z
После преобразований, с учетом выражений (5.3.1) и (5.3.2), получим:
|
|
|
Q = − |
|
f ′ |
|
β β1 |
|
|
|
|
|
|
|
|
(5.3.9) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
– поперечные (линейные) увеличения в точках A′ и A1′. |
|||||||||||
|
|
|
где β и β1 |
||||||||||||||||||||||
|
|
|
Или, с учетом выражения (5.2.5): |
|
|
||||||||||||||||||||
|
|
|
Q = |
n′ |
|
β β1 |
|
|
|
|
|
|
|
|
|
(5.3.10) |
|||||||||
|
n |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Теперь |
|
|
|
|
рассмотрим продольное увеличение |
для |
бесконечно малых |
|||||||||||||||
отрезков ( l → 0 , l |
′ |
→ 0 ) (по определению это и есть продольное увеличение). |
|||||||||||||||||||||||
|
|||||||||||||||||||||||||
В этом случае линейное увеличение в точках A′ |
и A1′ |
будет одинаковым, |
|||||||||||||||||||||||
следовательно: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
Q = |
|
n |
′ |
|
β |
2 |
= |
f |
′ |
|
β |
2 |
|
(5.3.11) |
||||||||
|
|
|
|
n |
|
|
|
|
f |
|
|
|
|
||||||||||||
|
|
|
l→0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Из выражения (5.3.8) можно получить: |
|
|
||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||
|
|
|
W = − |
|
f |
β −1 = |
|
|
n |
|
β −1 |
|
(5.3.12) |
||||||||||||
|
|
|
|
f ′ |
|
n′ |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Если оптическая система находится в однородной среде ( n′ = n ), то: |
||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||
|
|
|
Q = β 2 , W = β −1 |
|
|
|
|
|
(5.3.13) |
||||||||||||||||
То есть продольное увеличение равно квадрату линейного увеличения, а угловое обратно пропорционально ему.
5.3.5. Диоптрийное исчисление
Диоптрийное исчисление – это измерение продольных отрезков в обратных единицах (диоптриях):
D= a −1 , [дптр]
n
где an – приведенная длина.
Одна диоптрия соответствует приведенному отрезку в 1м. Если отрезок измеряется в мм, то обратный отрезок измеряется в килодиоптриях.
75
Используя формулу отрезков (5.3.5) и выражение (5.2.5) можно получить важное соотношение для приведенных отрезков в пространстве предметов и изображений и оптической силы, измеряемых в диоптриях:
|
n′ |
= |
|
n |
+ |
|
n′ |
|
|
|
|
|
|
f ′ |
|
||||
|
a′ |
|
a |
|
|||||
или |
|
|
|
|
|
|
|
||
|
D′ = D + Φ |
(5.3.14) |
|||||||
где |
D и |
D′ |
– приведенные передний и задний отрезки в диоптриях. То |
||||||
есть оптическая система увеличивает приведенный отрезок в пространстве изображений (в дптр) на величину оптической силы.
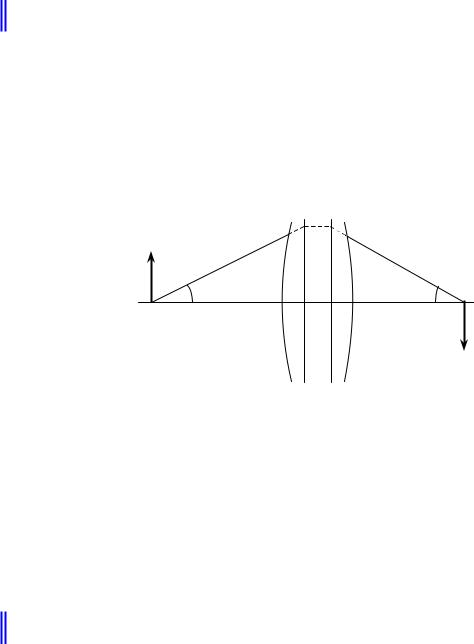
5.3.6. Инвариант Лагранжа-Гельмгольца
Инвариант Лагранжа-Гельмгольца связывает линейный размер предмета и угловой размер пучка лучей (рис.5.3.4). Эта величина инвариантна, то есть неизменна в любом пространстве.
n |
n′ |
y |
|
−α |
α ′ |
|
y′ |
Рис.5.3.4. Величины, которые связывает инвариант Лагранжа-Гельмгольца.
Для вывода этого инварианта воспользуемся выражением (5.3.8), связывающим угловое и линейное увеличения. Тогда воспользовавшись выражениями (5.2.1) и (5.2.3), определяющими линейное и угловое увеличения, получим следующее соотношение:
α′ y′ |
= |
n |
(5.3.15) |
|
α y |
n′ |
|||
|
|
Выражение (5.3.15) можно преобразовать, и тогда получим инвариант Лагранжа-Гельмгольца:
α y n =α′ y′ n′ |
(5.3.16) |
Инвариант Лагранжа-Гельмгольца характеризует информационную емкость оптической системы, то есть величину пространства, которое может быть отображено оптической системой. Этот инвариант математически выражает закон сохранения информации в геометрической оптике.
76

6. Матричная теория Гауссовой оптики |
|
|
6.1. Преобразование координат лучей оптической системой |
||
Основное действие оптической системы заключается в изменении хода |
||
лучей, которое описывается преобразованиями двух параметров – линейной и |
||
угловой координат луча. Эти преобразования наиболее удобно описывать при |
||
помощи аппарата матричной оптики. Матрица преобразования полностью |
||
описывает распространение лучей через оптическую систему. |
||
6.1.1. Координаты лучей в пространстве предметов и пространстве |
||
изображений |
|
|
Параметры луча в пространстве предметов и изображений могут быть |
||
заданы только в том случае, если выбраны опорные плоскости. Опорная |
||
плоскость (ОП) – это некоторая произвольно выбранная плоскость, |
||
перпендикулярная оптической оси. Опорные плоскости в пространстве |
||
предметов и изображений выбираются из соображений удобства и могут быть |
||
либо сопряженными, либо нет. |
|
y и угловая координата |
На рис.6.1.1 показаны линейная координата луча |
||
луча α . |
|
|
−α |
α′ |
|
|
y′ |
|
y |
|
|
ОП |
|
ОП′ |
Рис.6.1.1. Координаты луча. |
|
|
Вместо угла α часто используют направляющий косинус Y оптического лучевого вектора:
Y = n cos βy = −n sinα = −n α
где βy – угол между лучом и осью y , n α – приведенный угол.
Для лучей в меридиональной плоскости направляющий косинус X = 0 , таким образом, в параксиальной оптике луч может быть однозначно определен через линейную координату y и угловую координату Y = −n α :
y |
(6.1.1) |
|
|
|
|
Y |
|
|
77

Аналогично, луч в пространстве изображений описывается линейной координатой y′ и угловой координатой Y ′ = −n′ α′:
y′ |
(6.1.2) |
Y ′ |
6.1.2. Преобразование координат оптических лучей
Действие оптической системы заключается в преобразовании координат лучей:
y |
y′ |
|
|
→ (ОС)→ |
|
Y |
Y ′ |
|
Разложим выходные координаты луча в ряд: y′ = a0 + a1 y + a2Y + a3 y2 + a4 yY + a5Y 2 +...
Y ′ = b0 + b1 y + b2Y + b3 y2 + b4 yY + b5Y 2 +...
Если оптическая система является центрированной, то a0 = b0 = 0 . Все члены ряда, начиная с a3 и b3 , можно отбросить, так как они стремятся к нулю
на порядок быстрее, чем предыдущие. Таким образом, для идеальной оптической системы:
y′= Ay + BY
(6.1.3)
Y ′= Cy + DY
6.2.Матрица преобразования лучей
6.2.1.Общий вид матрицы преобразования (ABCD-матрица)
Выражение (6.1.3) для преобразования линейной и угловой координат луча, рассмотренные в параграфе 6.1, можно записать в матричной форме, тогда преобразование координат луча оптической системой можно представить в виде умножения некоторой матрицы вектора на вектор входных координат луча:
y′ |
|
A B y |
(6.2.1) |
|
|
= |
|
|
|
Y ′ |
C D |
Y |
|
|
Все свойства идеальной оптической системы полностью описываются
матрицей преобразования лучей G , называемой также гауссовой матрицей
или ABCD-матрицей:
G = |
A |
B |
(6.2.2) |
C |
D |
Выражение (6.2.1) можно также записать в виде:
′ |
= G b |
(6.2.3) |
b |
78
где b – вектор-столбец входных координат, b′ – вектор-столбец выходных координат, G – матрица, описывающая оптическую систему.
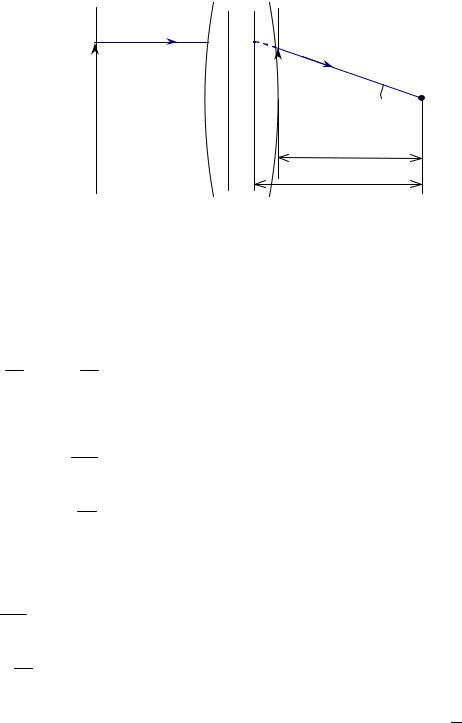
6.2.2. Геометрический смысл элементов матрицы преобразования
Рассмотрим луч с координатами y =1, Y = 0 (рис.6.2.1).
|
ОП |
ОП′ |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
y ′ |
F ′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
α′ |
|
SF′ ′
f ′
Рис.6.2.1.Схема для нахождения элементов A и C матрицы преобразования.
Подставив в выражение (6.1.3) значения y и Y ′, получим:
y′= Ay + BY = A
(6.2.4)
Y ′= Cy + DY = C
Из рис.6.2.1 видно, что: f ′ = αy′, SF′ ′ = αy′′
Отсюда с учетом того, что y =1, можно получить выражения для y′ и Y ′:
y′= SF′ ′ α′= SfF′′′
(6.2.5)
Y ′= −n′α′ = − nf ′′
Таким образом, подставив выражения (6.2.5) в (6.2.4), мы получим два элемента матрицы преобразования:
A = SfF′′′
(6.2.6)
C = − nf ′′ = −Φ
Теперь рассмотрим луч с входной координатой Y =1 (α = − n1 ) и выходной координатой Y ′= 0 (α′ = 0 ) (рис.6.2.2).
79