

3 Формирование дистанционного цифрового управления в режиме «online»
Исходные данные для формирования ДЦУ в режиме «online»:
Объект управления: непрерывный ТО с передаточной функцией:
![]() , где
, где![]() ;
;
канал связи: двоичный, с пропускной способностью
 ;
;вероятность искажения элементарного сигнала двоичного кода передачи управления по прямому каналу и кода сигналов измерения выхода по обратному каналу:
 ;
;число разрядов ЦАП и АЦП:
 ;
;перерегулирование:
 ;
;время переходного процесса:
 ;
;добротность по скорости:
 ;
;характер помехозащиты: произвольный;
категория системы передачи – приема ТМ – информации III-я с допустимой вероятностью ошибочного приема
 .
.
После подстановки получим:
 (3.1)
(3.1)
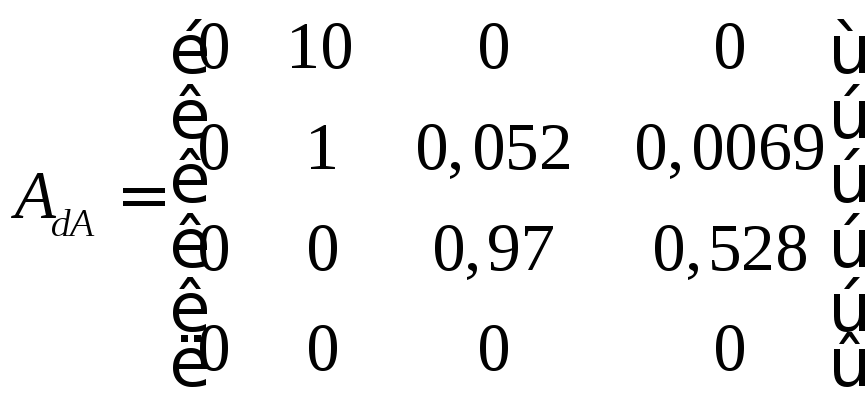
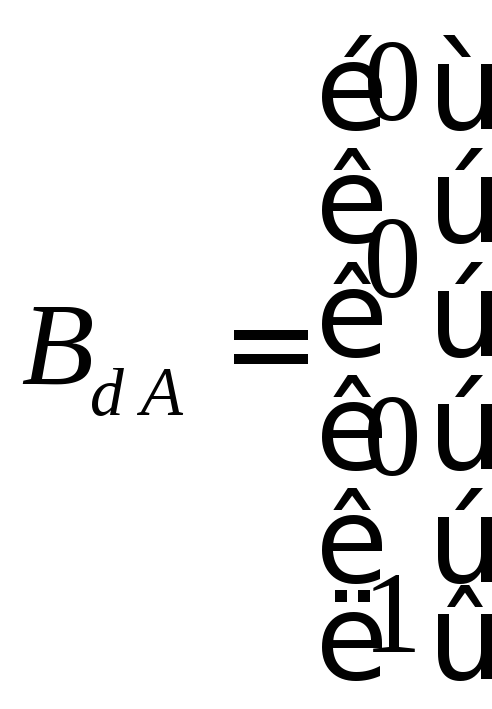
Представим данную модель в канонической управляемой форме ВСВ:
![]() (3.2)
(3.2)
где
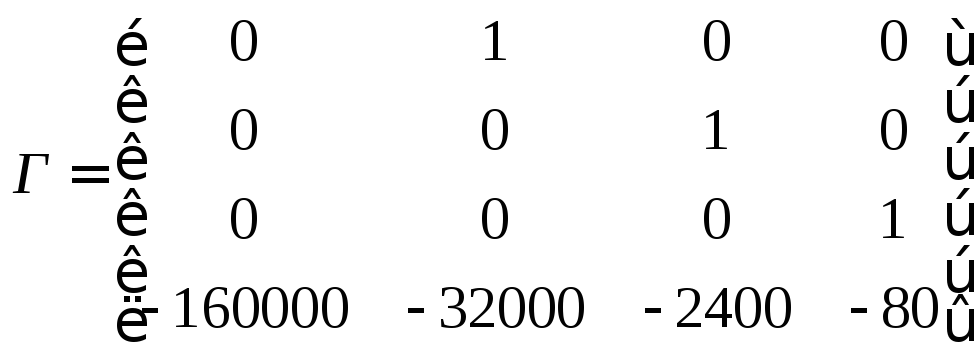
Проверим управляемость непрерывного ОУ:
![]() (3.3)
(3.3)
Так как
![]() ,
следовательно объект полностью управляем.
,
следовательно объект полностью управляем.
Проверим наблюдаемость непрерывного ОУ:
![]() (3.4)
(3.4)
Так как
![]() ,
следовательно объект полностью наблюдаем.
,
следовательно объект полностью наблюдаем.
Сформируем формат
![]() помехозащищённого кода при заданном
числе разрядов информационной части
помехозащищённого кода при заданном
числе разрядов информационной части![]() .
.
Для данного случая получим:
![]() (3.5)
(3.5)
Введем в рассмотрение первую априорную рабочую гипотезу о том, что достаточно, чтобы формируемый ПЗК исправлял ошибки только первой кратности (s=1).
![]() (3.6)
(3.6)
Проведем проверку справедливости гипотезы:
![]() (3.7)
(3.7)
![]() (3.8)
(3.8)
Условие
![]() не выполняется, поэтому переходим ко
второй рабочей гипотезе: достаточно,
чтобы код исправлял ошибки первой и
второй кратности (s=2).
не выполняется, поэтому переходим ко
второй рабочей гипотезе: достаточно,
чтобы код исправлял ошибки первой и
второй кратности (s=2).
![]() (3.9)
(3.9)
![]() (3.10)
(3.10)
Проведем проверку справедливости второй рабочей гипотезы:
![]() (3.11)
(3.11)
 (3.12)
(3.12)
Условие
![]() выполняется, поэтому параметры
помехозащищённого когда в форме
выполняется, поэтому параметры
помехозащищённого когда в форме![]() .
.
Рассчитаем длительность передачи одного
бита
![]() ,
используя данное значение пропускной
способности канала связи
,
используя данное значение пропускной
способности канала связи![]() .
.
![]() (3.13)
(3.13)
Теперь сформируем модифицированной интервал дискретности, расширенный на величину числа проверочных разрядов помехозащищённого кода:
![]() (3.14)
(3.14)
Для синтеза динамического цифрового управления, перейдем к дискретному представлению. Дискретную форму запишем в виде:
 (3.15)
(3.15)
где матрицы
![]() находятся
по формулам:
находятся
по формулам:
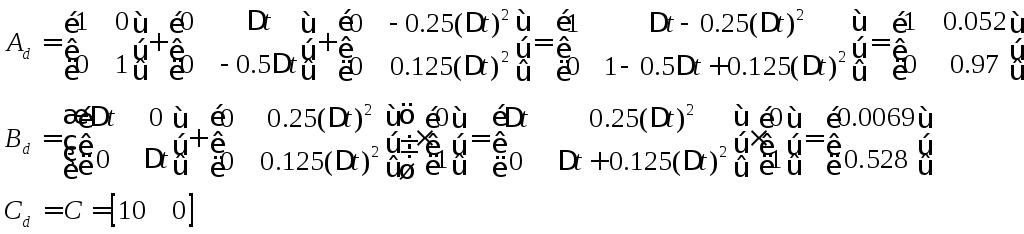
 (3.16)
(3.16)
Тогда получим:
Построим дискретное модельное
представление прямого и обратного
каналов связи в виде дискретных систем
первого порядка, осуществляющих задержку
дискретного сигнала на один интервал
дискретности агрегированной длительности
![]() в форме:
в форме:
![]()
![]()
![]()
![]() (3.17)
(3.17)
![]()
![]()
![]()
где
![]() ,
,![]() – соответственно векторы состояния,
управления и выхода в прямом и обратном
каналах единичной размерности так, что
справедливы представления
– соответственно векторы состояния,
управления и выхода в прямом и обратном
каналах единичной размерности так, что
справедливы представления
![]()
![]()
![]() (3.18)
(3.18)
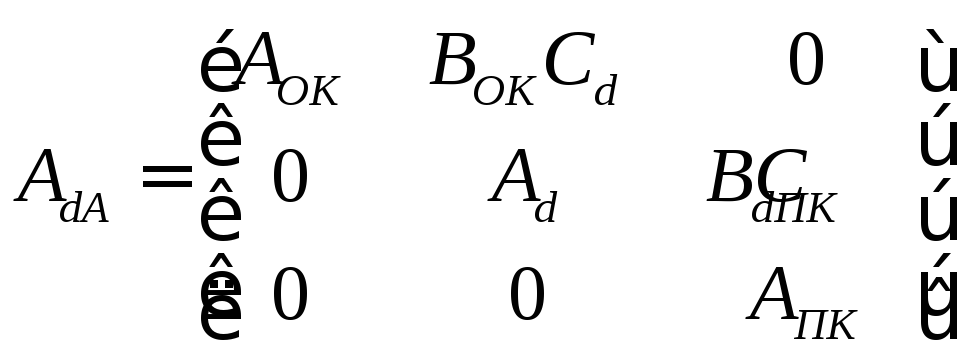
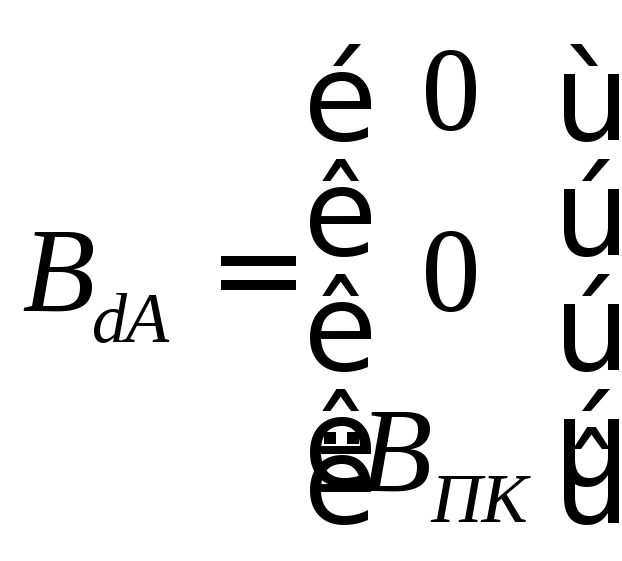
Сформируем дискретное модельное
представление агрегированного,
составленного из последовательного
соединения прямого канала связи,
дискретного ТО и обратного канала связи
с вектором состояния
![]() размерности na=n+2, вектором регулируемого
выхода
размерности na=n+2, вектором регулируемого
выхода![]() технического объекта цифрового
дистанционного управления, вектором
измеряемого выхода
технического объекта цифрового
дистанционного управления, вектором
измеряемого выхода![]() ,
представляющим собой выход ОКС, и
матрицами
,
представляющим собой выход ОКС, и
матрицами![]() ,
в форме
,
в форме
![]() ;
;![]()
![]()
![]() ,
(3.19)
,
(3.19)
где
 ;
; ;
;![]() ;
;![]() ;
;
 ;
; ;
;![]() ;
;![]()
Требование по обеспечению добротности по скорости означают, что система должна обладать астатизмом (отрабатывать постоянное воздействие с нулевой установившейся ошибкой).
Для построения регулятора необходимо
выбрать непрерывную полиномиальную
модель желательного поведения системы
из условия, что данная модель будет
обеспечивать время переходного процесса
![]() ,
добротность
,
добротность![]() и перерегулирование
и перерегулирование![]() .
Также необходимо выполнение условия
т. Шеннона-Котельникова:
.
Также необходимо выполнение условия
т. Шеннона-Котельникова:
![]() ,
,![]() (3.20)
(3.20)
Выберем биномиальное распределение мод 4-ой степени:
![]() (3.21)
(3.21)
Для биномиального распределения мод:
![]() ;
;![]() (3.22)
(3.22)
Проверим выполнимость условия т. Шеннона-Котельникова:
 (3.23)
(3.23)
Условие т. Шеннона-Котельникова не
выполняется, то есть невозможно обеспечить
заданную добротность с учетом того, что
интервал дискретности
![]() .
Таким образом, для решения поставленной
задачи необходимо предложить заказчику
уменьшить добротность.
.
Таким образом, для решения поставленной
задачи необходимо предложить заказчику
уменьшить добротность.
Поставим следующую задачу: необходимо
выбрать непрерывную полиномиальную
модель желательного поведения системы
из условия, что данная модель будет
обеспечивать время переходного процесса
![]() и добротность
и добротность![]() .
Тогда для биномиального распределения
мод:
.
Тогда для биномиального распределения
мод:
![]() ;
;![]() (3.24)
(3.24)
Возьмем большую характеристическую
частоту![]() .
Тогда:
.
Тогда:
![]() (3.25)
(3.25)
т.е. условие т. Шеннона-Котельникова выполняется. Характеристический полином:
![]() .
(3.26)
.
(3.26)
Зададим матрицу
![]() с данными модами:
с данными модами:
 (3.27)
(3.27)
и матрицу
![]() из условия наблюдаемости пары
из условия наблюдаемости пары![]()
![]() .
(3.28)
.
(3.28)
Дискретизируем данную модель:
 .
(3.29)
.
(3.29)
Матрицу
![]() назначим
из условия наблюдаемости пары
назначим
из условия наблюдаемости пары![]() :
:![]() .
.
Найдем матрицу
![]() из уравнения Сильвестра
из уравнения Сильвестра![]() ,
а затем и матрицу обратных связей из
условия:
,
а затем и матрицу обратных связей из
условия:![]() .
.
![]() (3.30)
(3.30)
Система представима в виде:
![]()
![]() ,
,
где![]()
![]() .
.
Вычислим матрицу
![]() :
:
 (3.31)
(3.31)
Сформируем матрицу
![]() прямой
связи по вектору задающего воздействия
прямой
связи по вектору задающего воздействия![]() на основании требований к свойствам
отношения «вход-выход» проектируемой
дискретной системы, обязательным из
которых является равенство входа и
выхода при неподвижном положении, так
что выполнение последнего позволяет
записать
на основании требований к свойствам
отношения «вход-выход» проектируемой
дискретной системы, обязательным из
которых является равенство входа и
выхода при неподвижном положении, так
что выполнение последнего позволяет
записать
![]() (3.32)
(3.32)
Матрица
 (3.33)
(3.33)
Проведем исследование динамических свойств спроектированной дискретной системы. Схема моделирования системы представлена ниже (см. рисунок 3.1)

Рисунок 3.1 – Схема моделирования системы
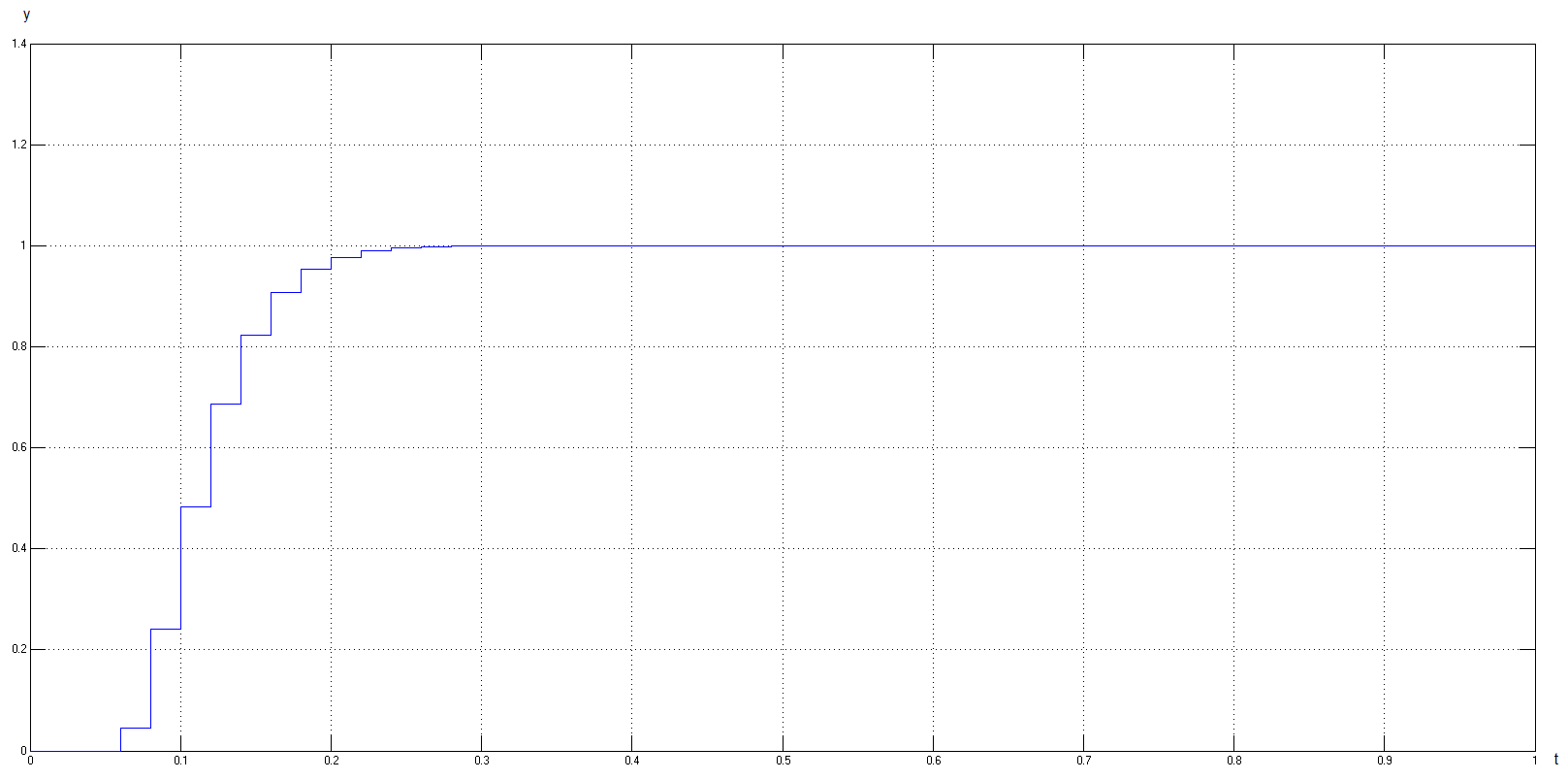
Рисунок 3.2 – График переходного процесса
при единичном воздействии
![]()
Из рисунка 3.2 видно, что время переходного процесса и величина перерегулирования находятся в допустимых приделах:
![]()
В результате моделирования разработанной системы управления НТО можно сделать вывод, что динамические свойства системы удовлетворяют требованиям технического задания.
Откажемся от гипотезы о полной измеримости
задающего воздействия
![]() ,
перейдя к форме, использующей доступный
непосредственному измерению сигнал
ошибки
,
перейдя к форме, использующей доступный
непосредственному измерению сигнал
ошибки![]() и единичную отрицательную связь по
выходу для формирования сигнала
управления в виде:
и единичную отрицательную связь по
выходу для формирования сигнала
управления в виде:
 (3.34)
(3.34)
где матрица
![]() вычисляется с помощью соотношения:
вычисляется с помощью соотношения:
![]() (3.35)
(3.35)
В реальной системе нам недоступен для
измерения вектор
![]() состояния объекта, так что заменим его
оценкой
состояния объекта, так что заменим его
оценкой![]() ,
формируемой наблюдающим устройством,
задаваемым в форме:
,
формируемой наблюдающим устройством,
задаваемым в форме:
![]() (3.36)
(3.36)
где матрицы
![]() Дну выбираются из условия
Дну выбираются из условия
![]() (3.37)
(3.37)
где
![]() - знак мажоризации, означающий в данной
задаче, что моды матрицы состояния
наблюдателя локализованы на комплексной
плоскости в круге меньшего радиуса, чем
радиус круга локализации мод матрицы
- знак мажоризации, означающий в данной
задаче, что моды матрицы состояния
наблюдателя локализованы на комплексной
плоскости в круге меньшего радиуса, чем
радиус круга локализации мод матрицы![]() состояния дискретной системы.
состояния дискретной системы.
![]() (3.38)
(3.38)
Зададим моды матрицы состояния:
![]() ,
и матрицу состояния наблюдателя в форме
Жордана:
,
и матрицу состояния наблюдателя в форме
Жордана:
 (3.39)
(3.39)
Матрица
![]() строится из условия управляемости
наблюдателя:
строится из условия управляемости
наблюдателя:
 (3.40)
(3.40)
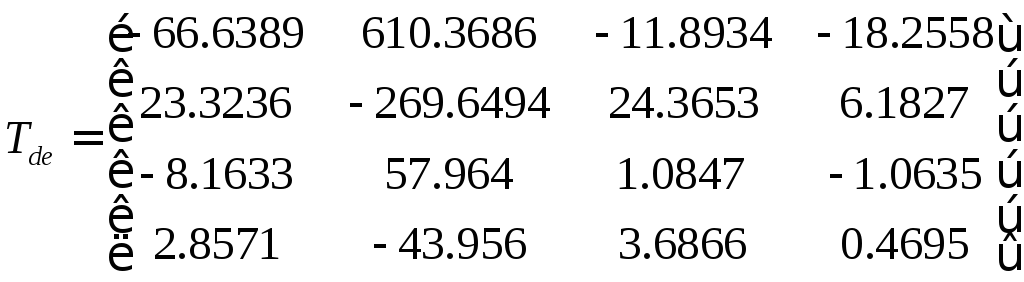
Вычислим матрицы
![]() подобия вектора наблюдения
подобия вектора наблюдения![]() вектору состояния
вектору состояния![]() ,
задаваемого в форме:
,
задаваемого в форме:
![]() (3.41)
(3.41)
в силу решения матричного уравнения Сильвестра:
![]() (3.42)
(3.42)
которое позволяет сформировать матрицу
входа
![]() в форме:
в форме:
![]() (3.43)
(3.43)
что обеспечивает асимптотическую
сходимость к нулю вектора невязки
наблюдения
![]() в форме:
в форме:
 (3.44)
(3.44)
Матрица
![]() имеет вид:
имеет вид:
 (3.45)
(3.45)
Матрица входа
![]() :
:
 (3.46)
(3.46)
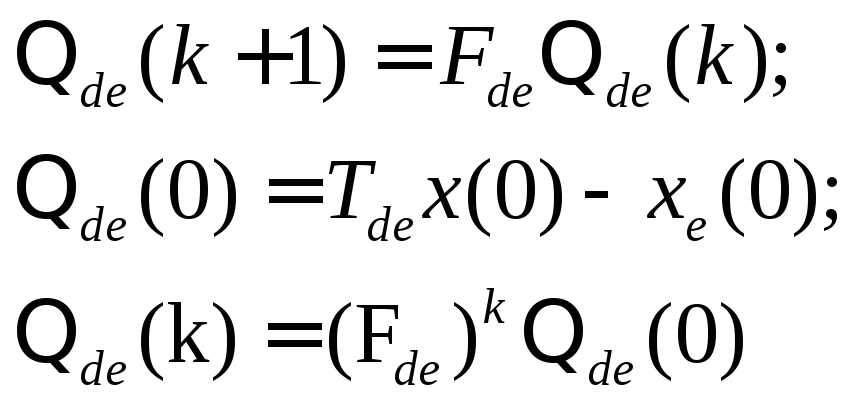
Сформируем физически реализуемую динамическую версию исходного закона управления в форме:
![]() (3.47)
(3.47)
где матрицы связей
![]() по выходу объекта управления и
по выходу объекта управления и![]() по вектору состояния динамического
наблюдающего устройства, вычисляется
в силу матричного равенства:
по вектору состояния динамического
наблюдающего устройства, вычисляется
в силу матричного равенства:
![]() (3.48)
(3.48)