

ДИПЛОМНИЙ ПРОЕКТ / Безбах МВТ-13сп Модернізація вагового дозатора Пояснювальна записка 2003 ворд / 5 .Алгоритмічне та програмне забезпечення
.doc
5 Алгоритмічне та програмне забезпечення
У мікроконтролерах avr є такий периферійний модуль як таймер лічильник. У відповідності зі своєю назвою він вважає час. У таймер лічильника є регістр TCNT з якого можна прочитати скільки часу пройшло з моменту запуску таймера. Значення в цьому регістрі не в хвилинах або секундах, а в 'тіках' таймера. Чому дорівнює один тік - залежить від тактової частоти, на якій працює мікроконтролер avr, і від налаштувань таймера. Так само у таймера лічильника є настроюємий подільник частоти, який визначає на скільки буде поділена тактова частота мікроконтролера перед тим як буде подана на таймер лічильник. Тривалість тіка таймера є зворотною величиною від частоти, отриманої в результаті поділу.
Насамперед написання програми для перетворення і зчитування сигналу (аналогового та інших) потребує розроблення її алгоритму.
Так звана схема (або алгоритм ) програми мікропроцесорної системи вимірювання ваги зображена на рисунку 5.1:
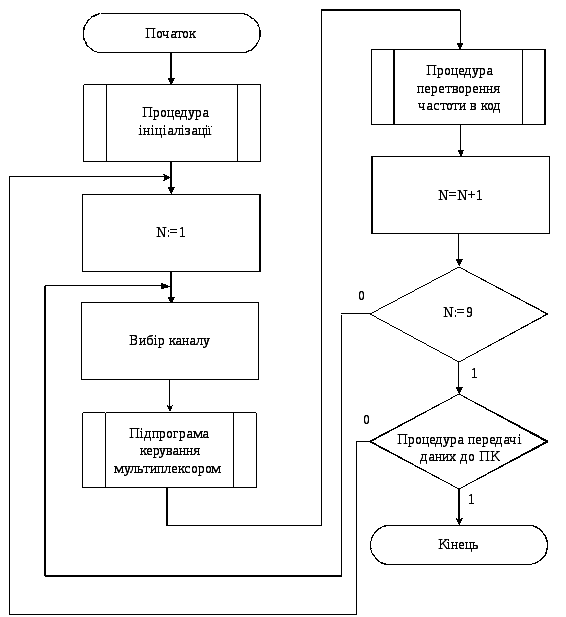
Рисунок 5.1 – Схема програми мікропроцесорної системи вимірювання ваги
За вищенаведеним алгоритмом було розроблено лістинг програми для Atmega 128 на C++:
#include <avr/interrupt.h>
ISR(TIMER0_OVF_vect)
{
/ / Giving counter such values / / To the next overflow occurred in 10 ms. / / Formula: 256 - 8 MHz / 1024/100 Hz = 177,785 = ~ 178 TCNT0 = 178;
}
int main()
{
/ / In addition to the first overflow interrupt occurred / / 10 ms, and be here to reset the counter.
TCNT0 = 178;
/ / Ratio of the frequency divider 1024
TCCR0 = 0x07;
/ / Enable interrupt filling counter
TIMSK |= (1 << TOIE0);
/ / Enable global interrupt
sei();
/ / Infinite loop program
while (1) continue;
}
#include <avr/interrupt.h>
unsigned long frequency;
/ / Interrupt events occur
ISR(TIMER1_CAPT_vect)
{
/ / Reset the counter
TCNT1 = 0;
/ / The result is true only in the case
/ / If the counter does not overflow
if (!(TIFR & (1 << TOV1)))
{
/ / Calculate the frequency of the inverse of the period.
frequency = (unsigned long)8000000 /
(unsigned long)ICR1;
}
else
{
/ / Frequency less than 122 Hz
frequency = 0;
/ / Reset the overflow flag counter
TIFR &= ~(1 << TOV1);
}
}
int main()
{
/ / Register the rising edge, the ratio of the frequency divider 1 TCCR1B = (1 << ICES1) | (1 << CS10);
/ / Enable interrupt-event
TIMSK = (1 << TICIE1);
/ / Enable global interrupts
sei();
/ / Infinite loop program
while (1) continue;
}
#include <avr/io.h>
int main()
{
/ / Set the output terminal
DDRB |= (1 << PIN5) | (1 << PIN6);
/ / Outputs A and B during the comparison low / / Mode "Fast PWM", a frequency divider 8
TCCR1A = (1 << COM1A1) | (1 << COM1B1) | (1 << WGM11);
TCCR1B = (1 << WGM13) | (1 << WGM12) | (1 << CS11);
/ / The greatest value of the counter. Formula:
// TOP = 8 MHz / 8 / 50 Hz
ICR1 = 20000;
/ / The half-life of the first motor 1 ms, 2 ms
OCR1A = 1000;
OCR1B = 2000;
/ / Infinite loop program
while (1) continue;
}