Шпоры Автоматика БГИТА ММ
.docx
|
45 Тензорезисторы, устройство, назначение и область применения? Тензорези́стор- резистор, сопротивление которого изменяется в зависимости от его деформации. Тензорезисторы используются в тензометрии. С помощью тензорезисторов можно измерять деформации механически связанных с ними элементов. Тензорезистор является основной составной частью тензодатчиков, применяющихся для косвенного измерения силы, давления, веса, механических напряжений, крутящих моментов и пр. Тензодатчики, как правило, приклеиваемые, состоят из: - элемента чувствительного к деформации; - тонкой плёнки, которая является изолятором и несущей основой для чувствительного элемента; - контактных площадок для присоединения выводных проводов. Элемент, чувствительный к деформации, представляет собой решётку, которая вытравлена способом фотолитографии или отштампована из очень тонкого листа металлической фольги толщиной 2,5 мкм. Конфигурация выбирается таким образом, чтобы обеспечить сопротивление равное 100 Ом при достаточно малой длине и ширине. Выпускаются датчики, длина которых меняется в диапазоне от 2 до 150 мкм. Выпускаются датчики специального назначения (мембранные датчики давления, напряжения, датчики деформации сдвига). Применяются: -Определение механических характеристик воздействия, которому подвергаются исследуемые объекты; -Выдача оценки состояния для оценки состояния этих объектов; -Долговременный мониторинг объектов в процессе эксплуатации; |
46. Пьезоэлектрические датчики, устройство, назначение и область применения? Пьезоэлектрический датчик - это измерительный преобразователь механического усилия в электрический сигнал; его действие основано на использовании пьезоэлектрического эффекта Один из вариантов конструкции П. д. давления показан на рис. Под действием измеряемого давления на внешней и внутренней сторонах пары пластин пьезоэлектрика возникают электрические заряды, причём суммарная эдс (между выводом и корпусом) изменяется пропорционально давлению. П. д. целесообразно применять при измерении быстроменяющегося давления; если давление меняется медленно, то возрастает погрешность преобразования из-за «стекания» электрического заряда с пластин на корпус. Включением дополнительного конденсатора параллельно П. д. можно уменьшить погрешность измерения, однако при этом уменьшается напряжение на выводах датчика. Основные достоинства П. д. — их высокие динамические характеристики и способность воспринимать колебания давления с частотой от десятков гц до десятков Мгц. Применяются при тензометрических измерениях, в весовых и сортировочных (по весу) устройствах, при измерениях вибраций и деформаций и т.д.
Схема устройства пьезоэлектрического датчика давления: p — измеряемое давление; 1 — пьезопластины; 2 — гайка из диэлектрика; 3 — электрический вывод; 4 — корпус (служащий вторым выводом); 5 — изолятор; 6 — металлический электрод.
|
47. 48 Датчики давления, устройство, назначение, область применения? Датчик давления — устройство, физические параметры которого изменяются в зависимости от давления измеряемой среды (жидкости, газы, пар). В датчиках давление измеряемой среды преобразуется в унифицированный пневматический, электрический сигналы или цифровой код.
48. Классификация усилителей? 1- Контактные (к контактным усилителям относятся: электромагнитные, магнитоэлектрические, электродинамические, индукционные и электротермические). 2 – Бесконтактные ( к бесконтактным усилителям относятся: магнитно, трмо- электрические, электромагнитные и полупроводниковые, гидравлические и пневматические) |
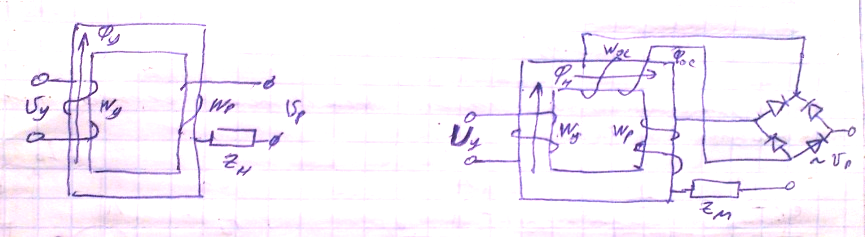
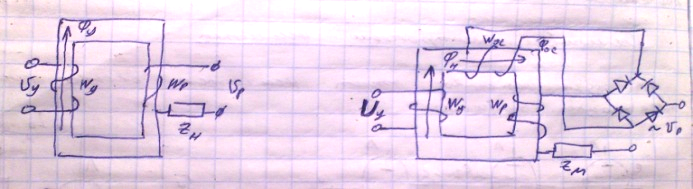
49. Магнитные усилители? Магнитные усилители называют электронными, устройство, которое использует магнитную проницаемость от напряженного магнитного поля.
Достоинства- усилители характеризуются надежностью, высокой эксплотационными качествами, высиким коэффициентом усиления и перегрузочной способностью. Недостатки- сравнительно небольшая инерционность, сложность в осуществлении больших входных сопротивлений, повышенная чувствительность , большие габариты и вес. |
|
50. Релейный усилитель? Релейный усилитель применяется в системах охранно-пожарных сигнализаций и предназначен для отключения и подключения различных приборов, которые входят в состав охранно-пожарной сигнализации, а также для коммутации самых различных исполнительных устройств. Усилитель подключается к стандартной сети переменного тока с напряжением 220 В, или же к источнику постоянного тока, с номинальным напряжением 30 В. Потребляемый усилителем ток составляет не более 40 мА. Максимальная сила коммутируемого тока при постоянном или переменном напряжении равна 5 А. Управляет устройство подключенными к нему приборами посредством замыкания-размыкания релейных контактов. |
|||
|
52. Струйный усилитель? Струйный усилитель состоит из струйной трубки 1, плиты с приемными соплами и силового цилиндра 2. Струйная трубка закреплена на полой оси и может поворачиваться на небольшой угол. Через полую ось к струйной трубке подводится жидкость под давлением. Расстояние между осями входных отверстий 2,5 мм, так что полный ход конца трубки составляет 1,25 мм в обе стороны. Приемные сопла плитки соединены с полостями сервопривода исполнительного механизма. Принцип работы струйного усилителя заключается в том, что кинетическая энергия струи масла, направляемая в сопло, преобразуется в потенциальную энергию давления; величина и направление результирующего давления на поршень сервопривода зависят от положения струйной трубки, от соблюдения соосности трубки и сопла.
|
|||
|
51. Золотниковый усилитель? Основными
элементами усилителя являются гильза
1
и поршень-шток
2
буртик
3.
Рабочая среда от источника
питания подаётся насосом под давлением
в среднюю полость золотника. Если
буртики поршня находятся в среднем
положении относительно окон в гильзе
(или перекрывают их), то исполнительный
механизм (в виде цилиндра двойного
действия) не приводится в движение.
При изменении измеряемой или регулируемой
величины поршень усилителя перемещается
(от чувствительного элемента ЧЭ
прибора). При этом открывается одно
из окон и рабочая среда, поступая в
исполнительный механизм, приводит
его в движение. В обычных САУ поршень
золотника можно непосредственно
подключить к чувствительному элементу.
|
|||
|
53, 54 Усилитель сопло заслонка?; Игольчатый усилитель?
|
55. Классификация исполнительных механизмов с электродвигателями? И.м. – устройства выполняющие команды регуляторов и отвечающие за конечный результат системы управления. Электрическим исполнительным механизмом в системах управления обычно называют устройство, предназначенное для перемещения рабочего органа в соответствии с сигналами, поступающими от управляющего устройства. Рабочими органами могут быть различного рода дроссельные заслонки, клапаны, задвижки, шиберы, направляющие аппараты и другие регулирующие и запорные органы, способные производить изменение количества энергии или рабочего вещества, поступающего в объект управления. При этом перемещение рабочих органов может быть как поступательным, так и вращательным в пределах одного или нескольких оборотов. Следовательно, исполнительный механизм с помощью рабочего органа осуществляет непосредственное воздействие на управляемый объект. Все электрические исполнительные механизмы, нашедшие широкое применение в самых различных отраслях современной техники автоматизации производственных процессов, можно разделить на две основные группы: 1) электромагнитные, 2) электродвигательные. К первой группе относятся прежде всего соленоидные электроприводы, предназначенные для управления различного рода регулирующими и запорными клапанами, вентилями, золотниками и т. п. Сюда же можно отнести исполнительные механизмы с различными видами электромагнитных муфт. Характерная особенность электрических исполнительных механизмов этой группы состоит в том, что необходимое для перестановки рабочего органа усилие создается за счет электромагнита, являющегося неотъемлемой частью исполнительного механизма. Для целей регулирования соленоидные механизмы обычно применяются только в системах двухпозиционного регулирования. В системах автоматического управления в качестве исполнительных элементов часто используются электромагнитные муфты, которые подразделяются на муфты трения и муфты скольжения. Ко второй, наиболее распространенной в настоящее время группе относятся электрические исполнительные механизмы с электродвигателями различных типов и конструкций. Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока). |
||
|
58. Трехфазные асинхронные двигатели переменного тока? Асинхронный электродвигатель, электрическая асинхронная машина для преобразования электрической энергии в механическую. Принцип работы А. э. основан на взаимодействии вращающегося магнитного поля, возникающего при прохождении трёхфазного переменного тока по обмоткам обмоткам статора, с током, индуктированным полем статора в обмотках ротора, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля при условии, что частота вращения ротора n меньше частоты вращения поля n1 .Т. о., ротор совершает асинхронное вращение по отношению к полю. Двигатель имеет две основные части: неподвижную – статор и вращающуюся – ротор. Статор состоит из корпуса, представляющего собой основание всего двигателя. Он должен обладать достаточной механической прочностью и выполняется из стали, чугуна и алюминия В корпус вмонтирован сердечник статора, представляющий собой полый цилиндр, на внутренней поверхности которого имеются пазы с обмоткой статора. Часть обмотки, находящейся вне пазов, называется лобовой; она отогнута к торцам сердечника статора. Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения. Обмотка статора состоит из трех отдельных частей, называемых фазами. Фазы могут быть соединены между собой звездой или треугольником. Как правило, начала обмоток на схемах обозначаются буквами А, В, С, концы – X, Y, Z. На корпусе двигателя имеется доска с зажимами, с помощью которых обмотка присоединяется к трехфазной сети. К каждому зажиму подключен соответствующий вывод обмотки. Для зажимов приняты следующие обозначения: зажимы, к которым подключены начала обмоток, обозначают буквами С1, С2 и С3, концы обмоток – соответственно С4, С5 и С6. Сердечник ротора представляет собой цилиндр, собранный из отдельных листов электротехнической стали, в котором имеются пазы с обмоткой ротора. Обмотки ротора бывают двух видов – короткозамкнутые и фазные. Соответственно этому различают асинхронные двигатели с короткозамкнутым и фазным ротором (с контактными кольцами). Короткозамкнутая обмотка состоит из стержней, расположенных в пазах, и замыкающих колец. Стержни присоединены к замыкающим кольцам, в результате чего обмотка оказывается короткозамкнутой. Вал ротора изготовлен из стали и вращается в шариковых или роликовых подшипниках. Подшипники укреплены в подшипниковых щитах, которые изготовлены из чугуна или стали и прикрепляются к корпусу болтами. |
|||
|
57. Двухфазные двигатели переменного тока? Двухфазный двигатель — электрический двигатель с двумя обмотками, сдвинутыми в пространстве на 90°. При подаче на двигатель двухфазного напряжения, сдвинутого по фазе на 90°, образуется вращающееся магнитное поле. Короткозамкнутый ротор двигателя обычно изготавливается в виде «беличьего колеса». Обычно число стержней короткозамкнутого ротора не связано с числом пар полюсов статора, то есть при двух парах полюсов статора число стержней ротора может быть например 14 штук. Они расположены в пазах магнитопровода статора так, что их магнитные оси образуют угол 90 эл. град. Эти фазы обмотки статора отличаются друг от друга не только числом витков, но и номинальными напряжениями и токами, хотя при номинальном режиме двигателя полные мощности их одинаковы.
Рис. 3. Схемы включения двухфазных асинхронных двигателей с короткозамкнутым ротором: а – с постоянно присоединенным конденсатором, б - с рабочим и пусковым конденсаторами. В одной из фаз обмотки статора постоянно находится конденсатор Ср (рис. 3, а), который в условиях номинального режима двигателя обеспечивает возбуждение кругового вращающегося магнитного поля. Напряжение на зажимах конденсатора Uc, включенного последовательно с фазой обмотки статора двухфазного асинхронного двигателя, при круговом вращающемся магнитном поле выше напряжения сети U и определяется так: Uc = U √1 + n2 Переход к нагрузке двигателя, отличной от номинальной, сопровождается изменением вращающегося магнитного поля, которое вместо кругового становится эллиптическим. Для повышения начального пускового момента параллельно рабочему конденсатору Ср включают пусковой конденсатор Сп (рис. 3, б), емкость которого намного больше емкости рабочего конденсатора и зависит от кратности начального пускового момента, которая может быть доведена до двух и более. |
|||
|
56. Исполнительные механизмы с двигателями постоянного тока? Электродвигательные исполнительные механизмы обычно состоят из двигателя, редуктора и тормоза (последнего иногда может и не быть). Сигнал управления поступает одновременно к двигателю и тормозу, механизм растормаживается и двигатель приводит в движение выходной орган. При исчезновении сигнала двигатель выключается, а тормоз останавливает механизм. Исполнительные механизмы с управляемыми двигателями в свою очередь можно разделить по способу построения системы управления на механизмы с контактным и бесконтактным управлением. Включение, отключение и реверсирование электродвигателей исполнительных механизмов с контактным управлением производится с помощью различной релейной или контактной аппаратуры. Это определяет основную отличительную особенность исполнительных механизмов с контактным управлением: у таких механизмов скорость выходного органа не зависит от величины управляющего сигнала, подаваемого на вход исполнительного устройства, а направление перемещения определяется знаком (или фазой) этого сигнала. В большинстве исполнительных механизмов, предназначенных для работы в схемах с контактным управлением, используются реверсивные электродвигатели. Применение электродвигателей вращающихся только в одну сторону, весьма ограничено, но все же имеет место. Бесконтактные электрические исполнительные механизмы отличаются повышенной надежностью и позволяющие относительно просто получать как постоянную, так и переменную скорость перемещения выходного органа. Для бесконтактного управления исполнительными механизмами используются электронные, магнитные или полупроводниковые усилители, а также их сочетание. При работе управляющих усилителей в релейном режиме скорость перемещения выходного органа исполнительных механизмов постоянна. Как электрические исполнительные механизмы с контактным управлением, так и бесконтактные можно подразделять также по следующим признакам. По назначению: с вращательным движением выходного вала — одиооборотные; с вращательным движением выходного вала — многооборотпые; с поступательным движением выходного вала — прямоходпые. По характеру действия: позиционного действия; пропорционального действия. По исполнению: в нормальном исполнении, в специальном исполнении (пылеводозащищенном, взрывозащищениом, тропическом, морском и т. п.). |
|||
|
59. Исполнительные механизмы с приводом от электромагнитных муфт? Исполнительные механизмы - предназначены для преобразования управляющих (командных) сигналов в регулирующие воздействия на объект управления. Практически все виды воздействий сводятся к механическому, т. е. к изменению величины перемещения, усилия к скорости возвратно-поступательного или вращательного движения. Исполнительные устройства являются последним звеном цепи автоматического регулирования и в общем случае состоят из блоков усиления, исполнительного механизма, регулирующего и дополнительных (обратной связи, сигнализации конечных положений и т. п.) органов. В зависимости от условий применения рассматриваемые устройства могут существенно различаться между собой. К основным блокам исполнительных устройств относят исполнительные механизмы и регулирующие органы. Электромагнитные муфты являются исполнительными элементами современных быстродействующих электроприводов. Муфты обеспечивают передачу вращения от ведущего вала (двигателя) к ведомому валу приводимого механизма. Находят применение в основном три вида электромагнитных муфт: гистерезисные, порошковые и фрикционные. Электромагнитные муфты обеспечивают плавное регулирование передаваемого момента и частоты вращения, ограничение передаваемого момента, плавность процесса пуска, изменение направления вращения, торможение. Наиболее важные выполняемые функции — передача и регулирование вращающего момента, при этом в следящих системах электромагнитные муфты выполняют функции усилителя мощности. Преимуществом порошковых муфт является их быстродействие, оно в 10 — 15 раз выше, чем у фрикционных электромагнитных муфт. Гистерезисные муфты отличаются стабильностью параметров во времени, большой долговечностью, относительно меньшими габаритными размерами по сравнению с фрикционными и порошковыми муфтами. |
|||
|
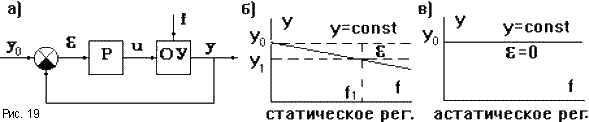
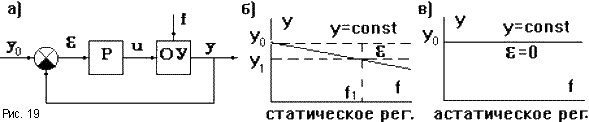
33. Назовите достоинства и недостатки статического и астатического регулирования?
Если на управляемый процесс действует возмущение f, то важное значение имеет статическая характеристика САУ в форме y = F(f) при yo = const. Возможны два характерных вида этих характеристик (рис.19). В соответствии с тем, какая из двух характеристик свойственна для данной САУ, различают статическое и астатическое регулирование.
Достоинства и недостатки статического и астатического регулирования: статические регуляторы обладают статической ошибкой; астатические регуляторы статической ошибки не имеют, но они более инерционны, сложны конструктивно и более дороги.
|
|||
|
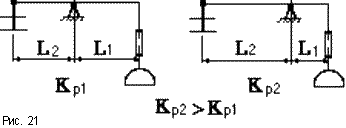
31. Что называется статической ошибкой регулятора, как ее уменьшить? Статические регуляторы работают при обязательном отклонении e регулируемой величины от требуемого значения. Это отклонение тем больше, чем больше возмущение f. Это заложено в принципе действия регулятора и не является его погрешностью, поэтому данное отклонение называется статической ошибкой регулятора. Из рис.21 видно, что, чем больше коэффициент передачи регулятора Kр, тем на большую величину откроется заслонка при одних и тех же значениях e, обеспечив в установившемся режиме большую величину потока Q. Это значит, что на статической характеристике одинаковым значениям e при больших Kр будут соответствовать большие значения возмущения Q, статическая характеристика САУ пойдет более полого. Поэтому, чтобы уменьшить статическую ошибку надо увеличивать коэффициент передачи регулятора. Того же результата можно добиться, увеличивая коэффициент передачи объекта управления.
|
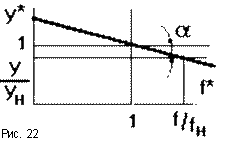
32. Что называется статизмом САР? Статизм- величина относительной статической ошибки при изменении нагрузки от холостого хода до номинально Fном. Статизм
d,
САР, характеризует насколько сильно
значение регулируемой величины
отклоняется от требуемого значения
при действии возмущений, и равна
тангенсу угла наклона статической
характеристики, построенной в
относительных единицах: d
= tg(a) =
|
||
|
|
|||
|
|
|||
|
1-20 1. Что называется управлением? 2. Что называется автоматическим управлением? 3. Что называется системой автоматического управления? 4. Что является основной задачей автоматического управления? 5. Что называется объектом управления? 6. Что называется управляемой величиной? 7. Что называется управляющим органом? 8. Что называется чувствительным элементом? 9. Что такое входная и выходная величины? 10. Что называется управляющим воздействием? 11. Что называется возмущением? 12. Что называется отклонением от заданной величины? 13. Что называется управляющим устройством? 14. Что называется задающим устройством? 15. Что называется функциональной схемой и из чего она состоит? 16. В чем отличие сигнала от физической величины? 17. В чем суть принципа разомкнутого управления? 18. В чем суть принципа компенсации? 19. В чем суть принципа обратной связи? 20. Перечислите достоинства и недостатки принципов управления?
|
21-40 21. В чем отличие систем прямого и непрямого регулирования? 22. Перечислите и дайте краткую характеристику основных видов САУ? 23. Что называется статическим режимом САУ? 24. Что называется статическими характеристиками САУ? 25. Что называется коэффициентом передачи, в чем отличие от коэффициента усиления? 26. В чем отличие нелинейных звеньев от линейных? 27. Как построить статическую характеристику нескольких звеньев? 29. В чем отличие астатического регулирования от статического? 30. Как сделать статическую САР астатической? 31. Что называется статической ошибкой регулятора, как ее уменьшить? 32. Что называется статизмом САР? 33. Назовите достоинства и недостатки статического и астатического регулирования? 34. Cхемы управления электродвигателями? 35. Конечные выключатели, устройство, назначение, область применения? 36. Индуктивные датчики, устройство, назначение, область применения? 37. Реостатные и потенциометрические датчики, устройство, назначение, область применения? 38. Фотоэлектрические датчики, устройство, назначение, область применения? 39. Сельсины, устройство, назначение, область применения? 40. Вращающиеся трансформаторы, устройство, назначение, область применения?
|
41-59 41. Емкостные датчики, устройство, назначение, область применения? 42. Датчики дефектоскопии древесины, устройство, назначение, область применения? 43. Тахогенераторы, устройство, назначение, область применения? 44. Датчики измерения ускорения, устройство, назначение, область применения? 45. Тензорезисторы, устройство, назначение, область применения? 46. Пьезоэлектрические датчики, устройство, назначение, область применения? 47. Датчики давления, устройство, назначение, область применения? 48. Классификация усилителей? 49. Магнитные усилители? 50. Релейные усилители? 51. Золотниковый усилитель? 52. Струйный усилитель? 53. Усилитель сопло-заслонка? 54. Игольчатый усилитель? 55. Классификация исполнительных механизмов с электродвигателями? 56. Исполнительные механизмы с двигателями постоянного тока? 57. Двухфазные двигатели переменного тока? 58. Трехфазные асинхронные двигатели переменного тока? 59. Исполнительные механизмы с приводом от электромагнитных муфт? |
|