Vse_otvety
.pdfБілети екзамінаційних питать з дисципліни «Проектування комплексів для нанесення покриття.»
1.Призначення технологічного устаткування .
2.Фунцціональні схеми технологічного устаткування для отримання покриття.
3.Технічні засоби для підтримання автоматичного керуванням процесу.
4.Датчики струму,датчики напруги, датчики швидкостей , датчики тиску та витрат газів.
5.Вторинні перетворювачі призначення та принцип дії ,термопари принцип вимірювання та застосування недоліки та переваги.
6.Прилади для керуванням витрат рідин та газів.
7.Схеми автоматичного регулювання і керування струму з змінною енергетичних показників на ДЖ.
8.Функціональні схеми автоматичних пристроїв для керування в ВКНП, електронного променя.
9.Схема регулювання струму електронного променя по частоті та напрузі за допомогою датчиків вторинної емісії.
10.Функціональна схема регулятора проплавлення з діею на просторове положення дуги.Фотодатчики.Призначення ,та принцип дії в складі устаткування.
11.Плазмові джерела живлення. Конструктивні особливості .ВАХ. Функціональні схеми та вузли.
12.Універсальні випрямлячі. Призначення .ВАХ. Склад .Вузли.
13.Вимоги до дротів живлення та силових кабелів до ДЖ-навантаження.
14.Використання ДЖ , які призначені для дугового зварювання, для газотермічних процесів напилення .
15.Випрямлячі з дросселями насичення. Функціональні схеми підключення. Призначення дросселів та їх конструкція.
16.Схеми керуванням допоміжним технологічним устаткуванням механізмів переміщення.
17.Системи охолодження елементів установок для ГТНП, та самих виробів.
18.Системи вентиляції при ГТНП.
19.Функціональні схеми керування установками плазмового напилення.
20.Портальні візки призначення, схема принцип дії , основні моменти дії сил.
__________-___---------------------------------------------------------------------------------
21.Велосипедні візки, призначення, схема принцип дії , основні моменти дії сил.
22.Глагольні візки, призначення, схема принцип дії , основні моменти дії сил.
23.Зварювальні візки ,призначення, схема принцип дії , основні моменти дії сил.
24.Підйомо-поворотні колони, призначення, схема принцип дії , основні моменти дії сил.
25.Унівесальні обертачі (маніпулятори та позиціонери) призначення та типи.
26.Розрахунки унівесальних обертачів.
27.Розрахунок механізму обертання планшайби.
28.Важільно-домкратні кантувачі, призначення, схема принцип дії , основні моменти дії сил.
29.Розрахунок двостоякових центрових кантувачів та обертачів, призначення, схема принцип дії , основні моменти дії сил.
30.Розрахунок одностоякових обертачів з вертикальним шпинделем, призначення, схема принцип дії , основні моменти дії сил.
31.Призначення та типи обертачів для процесу газотермічного напилення.
32.Призначення та типи кантувачів для процесу газотермічного напилення.
33.Гідравлічні притискачі , призначення, схема принцип дії , основні моменти дії сил.
34.Класифікація притискачів, призначення, схема принцип дії , основні моменти дії сил.
35.Шкідливі фактори при газотермічному напиленні покриття.
36.Шкідливі фактори при ВКНП.
37.Маніпулятори для допоміжних робіт, призначення, схема принцип дії , основні моменти дії сил.
38.Механіко-гідравлічні прилади, призначення, схема принцип дії , основні моменти дії сил.
39.Розрахунки притискачів, гвинтовий притистач,затискувальний пристрій, призначення, схема принцип дії , основні моменти дії сил.
40.Схеми керування електроприводами подавання дротів при електродуговому напиленні.
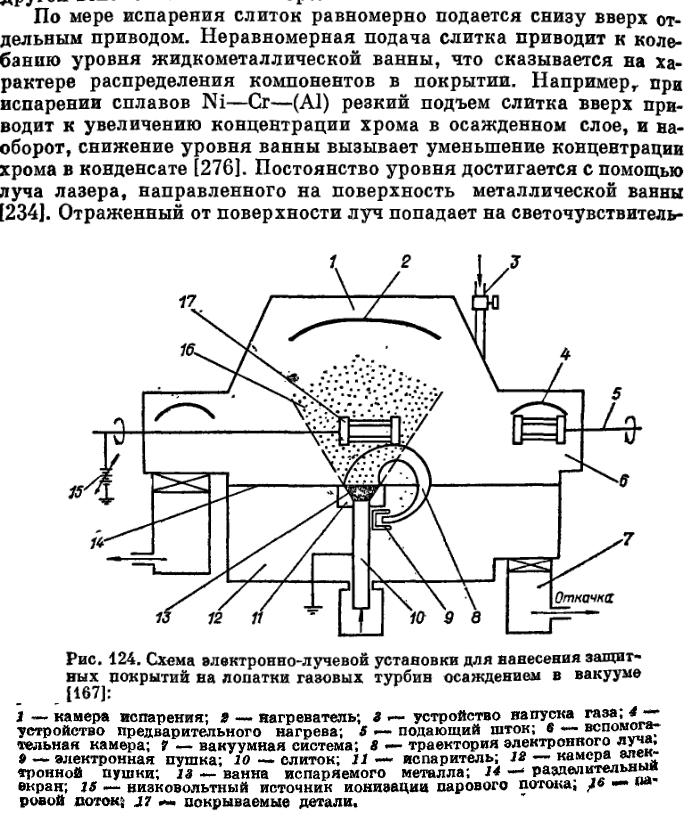
1. Призначення технологічного устаткування .
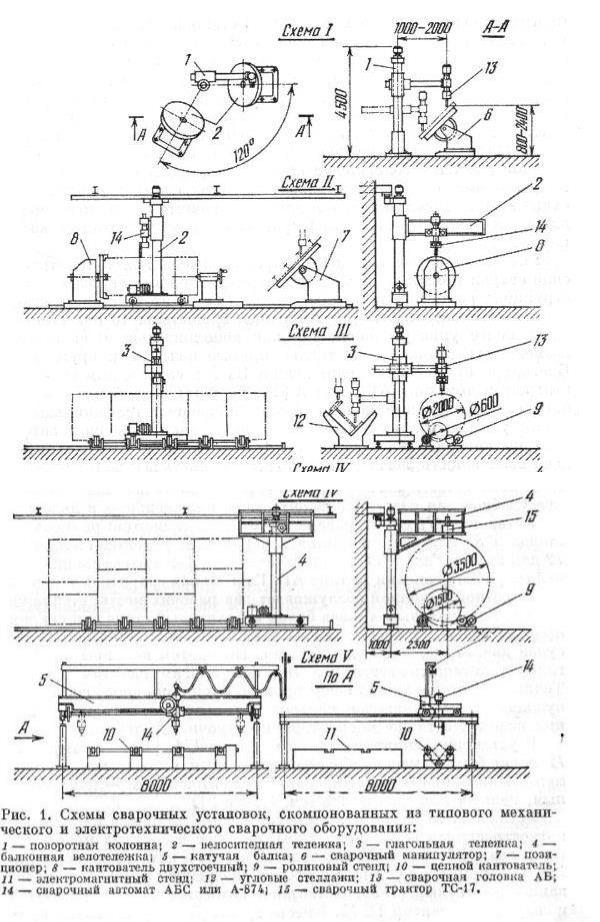
Оборудование, предназначенное для установки и поворота свариваемых изделий, объединяет шесть типов, из которых тип А представляют простейшие неповоротные устройства в виде стеллажей, плит, столов и пр. Эти неповоротные устройства предназначены для укладки изделий при сборке, сварке, отделке или правке. Более сложный поворотные устройства предназначены не только для первичной установки спариваемого изделия, но и для его оперативных поворотов при сборке, сварке, отделке, контроле и испытаниях. Это оборудование разделено по назначению на манипуляторы, позиционеры, вращатели, кантователи,роликовые стенды и поворотные столы.
Обычные сварочные манипуляторы имеют две взаимно перпендикулярные оси поворота и предназначены для наклона изделий в удобное для сварки положение и вращения их со сварочной скоростью при автоматической, полуавтоматической и ручной сварке кольцевых швов. Для механизации вспомогательных работ в сварочном производстве применяются многокоординатные манипуляторы или автооператоры, которые автоматически выполняют необходимые транспортноподъемные и вспомогательные операции при сборке и сварке изделий. Они применяются, главным образом, в механизированных и автоматических сборочно-сварочных линиях.
Особую категорию составляют специальные манипуляторы, которыми сварщик или сборщик манипулирует, когда приходится нести дистанционную сварку или сборку, т.е. производить операции сборки или сварки (или управлять ими) на расстоянии, например при сборке и сварке изделий в закрытых камерах с радиоактивной атмосферой.
Позиционеры предназначены для поворота и вращения изделий относительно двух взаимно перпендикулярных осей с установочной (маршевой) скоростью, а также для наклона их в удобную позицию при сборке, сварке или отделке. Таким образом, позиционеры, в отличие от сварочных манипуляторов, но имеют регулируемой сварочной скорости вращения.
Сварочные вращатели предназначены для вращения изделии со сварочной скоростью вокруг одной оси при автоматической, полуавтоматической или ручной сварке кольцевых швов. Кантователи нужны для поворота (кантовки) изделии и установки их. в удобное положение при сборке, сварке и отделке. Роликовые стенды применяются для вращения цилиндрических изделии со сварочной или маршевой скоростью ири сборке, сварке, отделке, контроле и испытаниях сварных конструкций. Поворотные столы предназначены для вращения изделии с маршевой скоростью вокруг одной оси и установки их в удобную позицию для сборки, сварки или отделки.
2. Функціональні схеми технологічного устаткування для отримання покриття.
Я так понял что это эти схемы функциональные, разсписывать не буду. Просто главное знать что это в Севбо есть и про них там можно найти.
В 2 словах как я понимаю, все они подразделяются в зависимости от веса, геометрии изделия, и места для сварки или наплавки, так же не забываем о мелких деталях которые придумаете на ходу сидя у него за столом. Авось чёто угадаете, а нет то читайте Севбо мне влом копирывать.
3. Технічні засоби для підтримання автоматичного керуванням процесу.
Структура |
сучасних |
систем |
автоматичного |
керування |
|
містить: |
|
вимірювальні |
перетворювачі |
параметрів |
процесу; |
задавачі |
і |
органи |
|
оперативного |
керування; |
пристрої |
відображення |
інформації; |
|
пристрої |
|
переробки інформації і формування керуючих дій; підсилювачі і виконавчі
пристрої. |
|
|
|
|
|
Найважливішими |
елементами |
автоматичних |
систем |
€ |
вимірювальні |
перетворювачі регульованих і контрольованих параметрів. Вимірювальний перетворювач це засіб вимірювання, який забезпечує перетворення якоїсь
вимірювальної |
фізичної |
величини |
у |
вихідний |
сигнал |
(як |
правило, |
електричний), |
зручний |
для дальшої |
|
обробки, передавання |
і |
зберігання. |
|
Розрізняють первинні вимірювальні перетворювачі (датчики) і вторинні
вимірювальні перетворювачі. Вимірювана величина надходить |
на |
вхід |
||||||||
первинного перетворювача. Для дальшого перетворення |
його |
вихідного |
||||||||
сигналу на вид, зручний для відображення, передавання, |
регулювання |
чи |
||||||||
введення до КОМ, використовуються вторинні вимірювальні перетворювачі. |
|
|
||||||||
Серед |
первинних |
перетворювачів, |
які |
застосовуються |
в |
системах |
||||
автоматизації |
установок |
нанесення |
покриттів |
найбільш |
розповсюджені |
|||||
датчики струму, датчики напруги, датчики швидкості, датчики |
тиску |
і витрат |
||||||||
газів та охолоджуючої речовини. |
|
|
|
|
|
|
||||
4.Датчики струму,датчики напруги, датчики швидкостей , датчики тиску та витрат газів.
Найпростішими і найпоширенішими датчиками струму єрезисторні вимірювальні перетворювачі, зокрема, шунти. Останні випускаються на діапазон струмів 0,5...10 КА і нормовані за вихідною напругою 30; 50; 75; 100 і 150 мВ. Найбільш поширені шунти на 75 мВ.
Для вимірювання змінного струму найзручнішими о трансформатори
струму. На діапазоніструмів від 0,5... |
10 кА випускаються вимірювальні |
||||||||
трансформатори струму 50 Гц. Вихідний струм |
уніфікований і |
становить 5 А |
|||||||
при номінальному навантаженні 5... 50 В А. |
|
|
|
|
|
|
|||
Перспективними |
є гальванометричні |
перетворювачі, |
які |
використовують |
|||||
ефект Холла. Діапазон вимірів струмів від |
одиниці |
ампер до |
десятків |
||||||
кілоампер. Смуга пропускання - до 100 кГц. |
|
|
|
|
|
|
|||
Датчики |
напруги. |
Як |
датчики |
напруги |
звичайно |
використовуються |
|||
резисторні |
подільники |
напруги. |
|
Для |
високоточних |
вимірювань |
|||
застосовуються промислові |
подільники, |
шо |
мають гарантовану |
похибку. |
|||||
Вони |
випускаються |
на діапазон |
напруг |
1...103 В |
з |
коефіцієнтом |
поділки |
||
1:10... 1:10000. |
|
|
|
|
|
|
|
|
|
Для |
вимірювання |
напруга |
в |
колах |
змінного |
струму |
застосовують |
||
вимірювальні трансформатори напруги. Вони випускаються |
па діапазон |
||||||||
напруг |
100В...15 |
кВ.Вторинна |
напруга |
уніфікована |
значеннями |
100; |
|||
100/√3 |
100/3; 150 В. |
|
|
|
|
|
|
|
|
Датчики швидкості. Швидкість обертання вала двигуна пропорційна в
найпростішому випадку напрузі |
на якорі електродвигуна постійною струму. |
Для точніших вимірювань |
використовуються тахогенератори, механічно |
з'єднані з валом двигуна. Вони генерують напругу, пропорційну кутовій
швидкості обертання. |
|
|
|
|
Для |
високоточного |
вимірювання |
швидкостей |
використовуються |
імпульсні датчики, які перетворюють кут оберту вала в число імпульсів.
Наприклад, це може бути |
пристрій, який складається із джерел світла і |
|
фотоприймачів, |
між якими |
встановлений кодуючий пристрій (модуляційний |
диск). При |
обертанні вала модуляційний диск забезпечує почергове |
|
перекривання світлового потоку від випромінювачів на фотодіоди. Отримані імпульси нормуються схемою обробки імпульсів, яка також визначає напрям
обертання. |
|
|
|
|
|
|
|
Датчики |
тиску і |
витрат газів. У датчиках |
тиску механічні |
переміщення |
|||
центра |
мембрани |
або кінця трубки Бурдона перетворюються |
в |
поворот |
|||
повзуна потенціометра (реостатні датчики), зміну ємності |
(ємнісні |
датчики), |
|||||
зміну |
опору |
(п’єзорезестивні, |
тензорезистивні), |
зміну |
|
взаємної |
|
індуктивності. Ці |
величини перетворюються |
вторинними |
перетворювачами |
||||
на уніфікований сигнал постійного струму або код. |
|
|
|
|
|||
Витрати |
газів |
можуть |
вимірюватися |
тепловими |
|
масовими |
|
витратомірами. |
|
|
|
|
|
|
|
5 - Вторинні перетворювачі призначення та принцип дії ,термопари принцип вимірювання та застосування недоліки та переваги.
Основне призначення вимірювальних приладів —засоби вимірювання які призначені для видачі кількісної інформації і фізичної величини яку вимірюють у доступній для сприйняття формі.
Вимірювальні прилади класифікуються за декількома ознаками:
— за видом подання результатів вимірювання — аналогові (засоби які мають шкалу звелечинами) і цифрові (цифрові електронні шкали для вимірювання);
— за видом структурної схеми — прилади прямого вимірювання і прилади, що працюють за принципом компенсації;
— за видом енергії, що використовується —
електричні, пневматичні і гідравлічні прилади.
Основні риси аналогових приладів прямого вимірювання — малопотужний вихідний сигнал, здатний перемістити тільки стрілку відносно шкали, і відсутність зворотногозв'язку. Приклади таких приладів — логометри, вольтметри, амперметри тощо.
Діляться по характеру перетворення:
АЦП, Ана́лого-цифрови́йперетво́рювач — пристрій, щоперетворюєвхідний аналоговий сигнал в дискретний код (цифровий сигнал).
Зворотнеперетворенняздійснюється за допомогою цифро-аналогового перетворювача ЦАП.
Як правило, АЦП — електроннийпристрій, щоперетворюєелектричнунапругу( абоінщіпоказники) в двійковийцифровий код.
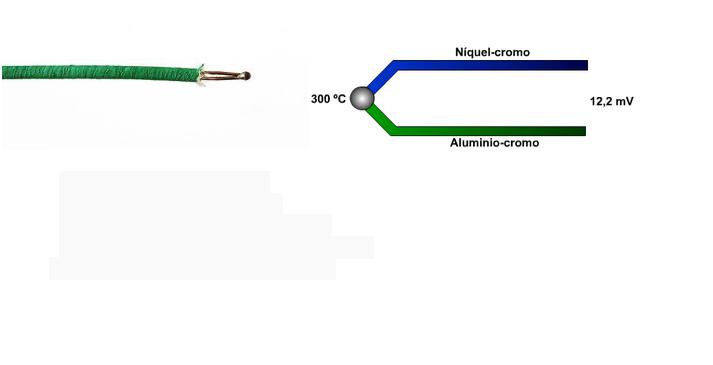
Термопа́ра — чутливий елемент термоелектричного перетворювача у вигляді двох ізольованих провідників з різнорідних матеріалів, з'єднаних на одному кінці, принцип дії якого ґрунтується на використанні термоелектричного ефекту для вимірюванням температури. Використовується у устаткуванні для вимірювання температури, а також для прямого перетворення енергії тепла в електричну енергію
Термопари Бувають спаяні з таких матеріалів як :
-ТХА (хромель-алюмелеві)
-ТЖК (залізо-константанові)
-ТПП 13 (платинородій-платинові)
-ТХКн (хромель-константанові) та інщі. Працюють у діапазонах температур
Принцип дії термопари заснований на ефекті Зеєбека, інакше термо-ЕРС. Коли кінці провідника піддати різним температурам, між ними виникає різниця потенціалів, пропорційна різниці температур, коефіцієнт пропорційності називають коефіцієнт
термо-ЕРС. У різних металів коефіцієнт термо-ЕРС різний, і відповідно різниця потенціалів, що виникає між кінцями різних провідників, буде різна. Помістивши спай з металів з відмінними коефіцієнтами термо-ЕРС в середовище з температурою  , ми отримаємо напругу між протилежними контактами, що піддані іншій температурі
, ми отримаємо напругу між протилежними контактами, що піддані іншій температурі  , яка буде пропорційна різниці температур
, яка буде пропорційна різниці температур  і
і  .
.
Переваги:
Висока точність вимірювання значень температури (аж до ± 0,01 ° С). Великий температурний діапазон виміру: від -250 ° C до +2500 ° C. Простота.
Дешевизна. Надійність.
Недоліки:
Для отримання високої точності вимірювання температури (до ± 0,01 ° С) потрібна індивідуальна градуювання термопари.
На великій довжині термопарних і подовжувальних проводів може виникати ефект «антени» для існуючих електромагнітних полів.
Виникнення термоелектричної неоднорідності в результаті різких перепадів температур, механічних напружень, корозії і хімічних процесів в провідниках призводить до зміни градуювальної характеристики
Залежність ТЕДС від температури істотно нелінійна. Це створює труднощі при розробці вторинних перетворювачів сигналу
6 - Прилади для керуванням витрат рідин та газів.
Для керуваннявитратамирідин та газіввикорстовуютьРедуктори та водянікрани Газові редуктори призначенні для пониження тиску газу, що надходить від джерела
живлення (балону або газопроводу), для підтримання постійним його витрати і тиску незалежно від зміни цих параметрів перед редуктором.
Редуктори характеризуються робочим тиском, пропускною спроможністю, чутливістю регулювання, межею редуціювання, та перепадом тиску. Пропускна спроможність характеризується витратою газу за одиницю часу, що забезпечується редуктором при певному робочому тиску у камері низького тиску, коли випускний вентиль відкритий повністю. Пропускна спроможність залежить від робочого тиску та площі перерізу каналів штуцера і не залежить від тиску газу у балоні, або в лінії постачання.
У разі встановлення на виході, замість манометра, покажчика витрати газу манометричного тину, який працює в комплекті із двома вимірювальними дюзами, прилад називається регулятором витрати.Шкала покажчика витрати градуйована в одиницях витрати {м3/год або л/хв).
Водяні крани та редуктори
Редуктори тиску, або редукційні клапани, призначені для обмеження тиску в системах опалення та водопостачання. Крім основного призначення, зберігати в цілісності гідротехнічне обладнання, таке як труби і водорозбірні пристрої (крани, гнучкі підводки і змішувачі)
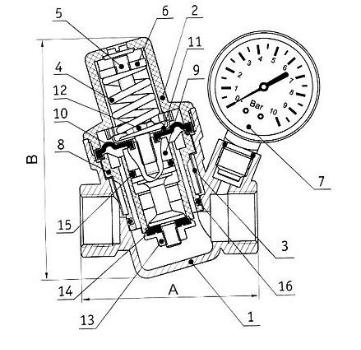
1. Корпус 2. Крышка 3.Фильтр-сетка 4.Пружина 5.Винт регулировочный 6.Гайка регулировочная 7.Манометр 8.Центральный суппорт 9.Поршень 10.Диафрагма11.Тарелка поршня 12.Прижимной болт 13.Клапан 14.Прокладка клапана 15. Кольцо уплотнительное малое 16. Кольцоуплотнительноебольшое
Робота такого редуктора побудована на принципі вирівнювання зусиль діафрагми і настроювальної пружини. При відкритті крана в водопроводі вихідний тиск редуктора зменшується, що призводить до зниження тиску на діафрагму. Зусилля пружини при цьому виявляється більшим, і, вирівнюючи його, вона одночасно відкриває робочий клапан до тих пір, поки робочий тиск на виході не стане рівним заданому значенню. При цьому тиск на вході редуктора, а також його скачки ніяк не впливають на відкриття або закриття клапана.
7 - Схеми автоматичного регулювання і керування струму з змінною енергетичних показників на ДЖ.
Напруга залання U3пропоційна потрібній величині струму дуги, формується у блоці задання струму (БЗС) і надходить до блокапорівняння БП. Сюди ж надходить сигнал зворотного зв’язку по струму U33- напруга, яка знімається з датчика струму ДС і є пропорційною струму дуги Iд.
У блоці порівняння відбувається алгебраїчне підсумування сигналів. Різниця Upподасться до входу фазозсуваючого пристрою ФП, яке перетворює безперервний сигнал у фазу імпульсів, що надходять на керуючі електроди тиристорів реіулягора ТР.
Якщо струм дуги випадково зменшився, то при постійній напрузі задання U3 і сигналі зворотного зв’язку U33, який зменшився внаслідок зменшення струму дуги, напруга Up, що є їх алгебраїчною сумою, збільшиться. У результаті ФП сформує імпульси раніше, кожний тиристор відкриється ближче до початку напівперіоду і струм дуги зросте до значення, близького до початкового струму. При випадковому збільшенні струму дуги процес здійснюється у такій же послідовності, тільки Up при ньому зменшиться, тиристори відкриються пізніше і струм дуги зменшиться.
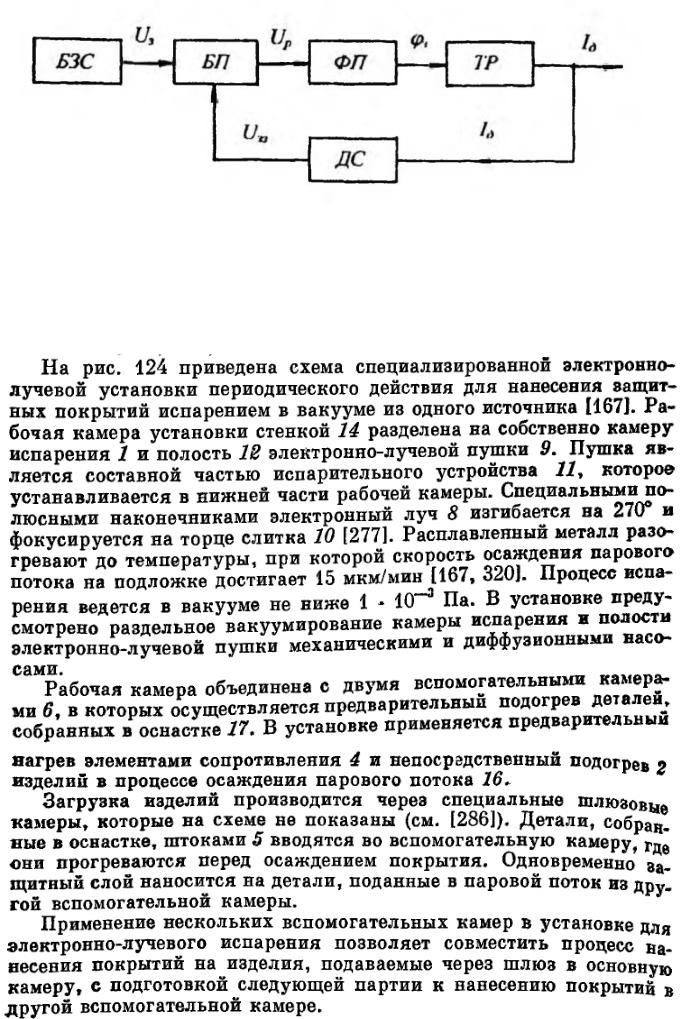
Структурна схема системи керування джерелом |
живлепия: БЗС блок |
||
задання струму; БП - |
блок порівняння; |
ФП |
фазозсуваючий пристрій; ТР - |
гарисіорвий регулятор; ДС |
датчик струму, |
Upрезультуюча напруга керування; |
|
U33- напруга зворотного зв’язку; U3- напруга задання; |
φ кут вмикання; Iд - струм дуги |
||
8 - Функціональні схеми автоматичних пристроїв для керування в ВКНП, електронного променя.