

Т3 Логика решения задач
.pdfкачества – задача проектировщиков и эксплуатационного персонала. Более того, директивное повышение качественных показателей заставляет персонал искать пути улучшения качества систем, осуществлять поиск новых решений. С другой стороны, если технические условия выполняются с запасом, то внимание к этим показателям можно ослабить. В итоге производственные ресурсы сосредотачиваются на критических направлениях, что повышает эффективность решения поставленных задач.
320. Таким образом, постановка задач выбора решений и управления на основе метода ограничений может быть представлена в математической форме как задача решения системы целевых неравенств
y y |
y , |
(3.1) |
|
i |
i |
i |
|
yi |
fi (x), i Iнер . |
(3.2) |
|
Здесь неравенства (3.1) определяют условия задачи, представляемые как множества допустимых или желаемых значений координат yi объекта
управления. Сам объект управления описывается уравнениями связи (3.2). Целью решения задачи является нахождение допустимого значения xдоп
вектора управляемых координат x , удовлетворяющего системе неравенств
(3.1)-(3.2).
330. Если система неравенств (3.1)-(3.2) является совместной, то поставленная задача является разрешимой в смысле возможности нахождения допустимого решения xдоп . В противном случае задача в
обычном смысле решения не имеет. Постановка задачи (3.1)-(3.2) в этом случае считается противоречивой.
340. Выделим из неравенств (3.1) ограничения, которые существенно препятствуют решению поставленной задачи. С этой целью назначим неравенствам (3.1) определенные веса, которые отражают степень важности удовлетворения соответствующего ограничения:
|
|
|
y y |
y : |
, |
|
|
||
|
|
|
i |
i |
i |
i |
|
|
|
|
|
|
i 0, |
i |
1 , i Iнер ; |
|
(3.3) |
||
|
|
|
|
|
|||||
|
|
|
|
|
i Iнер |
|
|
|
|
где i |
- веса неравенств, Iнер |
- индексное множество системы неравенств |
|||||||
(3.3). |
|
|
|
|
|
|
|
|
|
Введем показатель совместности неравенств (3.3) |
|
|
|||||||
|
|
|
C i i |
, |
|
(3.4) |
|||
|
|
|
|
|
i Iнер |
|
|
|
|
где i |
- характеристическая |
функция |
|
i -го неравенства ( i |
1 , |
если |
|||
неравенство y y |
y выполняется, и |
|
0 в противном случае). |
|
|||||
|
i |
i |
i |
|
|
|
i |
|
|
В силу соотношений (3.2) показатель совместности (3.3) определен на векторе x :
304

C(x) i i (x) , |
(3.5) |
i Iнер |
|
На основе введенного показателя (3.5) решение системы взвешенных неравенств (3.3)-(3.2) можно представить как решение экстремальной задачи50
max C(x) . |
(3.6) |
(x) |
|
350. Если система взвешенных неравенств (3.3)-(3.2) совместна, то
max C(x) C(xдоп ) 1, |
(3.7) |
(x) |
|
при этом веса неравенств на решение не влияют.
360. Иначе обстоит дело при несовместной системе неравенств. В этом случае решение экстремальной задачи (3.6) выделяет максимальносовместную подсистему неравенств
|
|
y y |
y : |
, |
i I max I |
нер |
; |
(3.8) |
||
|
|
i |
i |
i |
i |
|
нер |
|
|
|
для которых (x |
доп |
) 1. Здесь |
I max |
- индексное множество выделенной |
||||||
i |
|
|
|
нер |
|
|
|
|
||
максимально-совместной подсистемы неравенств.
Смысл максимально-совместной подсистемы (3.8) состоит в том, что она определяет допустимое решение задачи, удовлетворяющее наиболее важным условиям. При этом условия, которые противоречат полученному решению, из критерия (3.6) исключаются по признаку i 0.
370. Согласование противоречивых условий решаемой задачи, может быть получено с использованием различных подходов.
Наиболее просто согласование условий решаемой задачи осуществляется на основе метода уступок. При этом, например, в качестве допустимых принимаются значения координат объекта управления, которые получаются в результате решения задачи (3.6):
y |
f |
(x |
доп |
), i I |
нер |
\ I max . |
(3.9) |
i,доп |
i |
|
|
нер |
|
В общем случае процедура согласования условий решаемой задачи может осуществляться в интерактивном режиме, когда на каждом шаге
50 Алгоритмы решения данной задачи рассмотрены в работах:
Казаринов, Л.С. Алгоритм оптимизации для задач проектирования при противоречивом техническом задании / Л.С. Казаринов, А.Б. Бордецкий // Информационные и управляющие элементы и системы: сб. науч. тр. – Челябинск: ЧПИ, 1979. – № 231.
Казаринов, Л.С. Об определении комитета системы взвешенных неравенств / Л.С. Казаринов, А.Б. Бордецкий // Кибернетика. – 1981. – № 5.
Казаринов, Л.С. Координация решений в многоуровневых системах проектирования / Л.С. Казаринов, Н.В. Омельченко // Вопросы кибернетики. Методы и модели оценки эффективности развивающихся систем. – М.: Наука, 1982.
Казаринов, Л.С. Нестационарные процессы синтеза сложных систем / Л.С. Казаринов. – Иркутск: Изд-во ИГУ, 1985.
305
согласования осуществляются определенные уступки по ограничениям (3.3), а также изменяются веса ограничений. При этом, соответственно, решается задача (3.6), которая формально дает ответ на вопрос: является согласуемая постановка задачи противоречивой или нет? В итоге указанная процедура приводит к согласованной постановке задачи выбора решения. Метод уступок не приводит к качественно новому решению рассматриваемой задачи и сводится лишь к количественному согласованию ее условий.
380. Принципиально иная ситуация возникает, если все наложенные ограничения (3.1) являются существенными, и поэтому не подлежащие уступкам. В этом случае решение (3.8) считается частичным, так как
удовлетворяет лишь подмножеству Iнерmax Iнер ограничений. В общем
случае противоречивая система неравенств (1.1)-(1.2) характеризуется множеством максимально-совместных подсистем, которые определяют соответствующее множество частичных решений:
|
|
y y |
y , |
i I k |
; |
k K |
нер |
, |
(3.10) |
|||
|
|
i |
i |
|
i |
|
нер |
|
|
|
|
|
для которых |
(xk |
) 1. |
Здесь |
I k |
|
- индексное множество неравенств, |
||||||
|
i доп |
|
|
|
нер |
|
|
|
|
|
|
|
входящих в k -ую максимально-совместную подсистему; Kнер - множество
значений индекса k максимально-совместных подсистем системы неравенств (3.1)-(3.2).
Таким образом, с формальной точки зрения противоречивым постановкам задач выбора решений соответствует множество частичных решений, из которых каждое в отдельности удовлетворяет лишь части условий решаемой задачи, а в совокупности они могут удовлетворять всем условиям решаемой задачи. В данной ситуации не существует единственного решения, и движение вперед в решении задачи может быть достигнуто лишь на основе поиска синтетических решений.
390. Одним их подходов к поиску синтетических решений является использование генетических алгоритмов. В этом случае частные решения рассматриваются как исходные экземпляры популяции решений. Применяя к данной популяции генетический алгоритм, можно получить последующие популяции решений, в которых на основе принятых правил отбора организуется последовательный процесс улучшения популяции.
400. Неформальный подход здесь должен реализовать интеллектуальную операцию, которая согласно ранее данной классификации представляет собой операцию синтеза конкретного. Другими словами, на основе рассмотрения частных решений необходимо попытаться предложить синтетическое решение, которое бы удовлетворяло противоречивым условиям задачи. Как было рассмотрено ранее, интеллектуальная операция синтеза конкретного может быть
306
представлена в виде последовательности операций синтеза абстрактного и операции конкретизации. Операция синтеза абстрактного представляет собой выдвижение идеи решения задачи. Таким образом, дальнейшее движение вперед в решении задач с противоречивыми условиями неразрывно связано с выдвижением идеи системного согласования частных решений.
410. Например, противоречивость постановки решаемой задачи может быть вызвана тем, что при ее формулировке не были учтены некоторые референтные обстоятельства. Полученные частные решения могут служить основой поиска данных обстоятельств. Если эти обстоятельства будут найдены, то общее решение задачи может быть сформулировано, например, следующим образом:
xдоп (z) xkдоп k (z k ) . |
(3.11) |
k Kнер |
|
Здесь переменная z принимает свои значения на множестве обстоятельств { k }. Переменная k (z k ) представляет собой характеристическую
функцию отношения включения z k (если z k , то k 1, в противном случае k 0 ). В итоге решение (3.11) носит гибкий адаптивный характер,
при котором в зависимости от обстоятельств реализуется определенное частное решение.
420. Множества референтных обстоятельств могут быть определены, например, на основе комитетного подхода к распознанию образов. Суть комитетного подхода состоит в следующем.
Предположим вся информация, представляющая совокупные результаты наблюдения характеристик, относящихся к объекту управления и его среде, может быть представлена в виде числовых значений вектора z
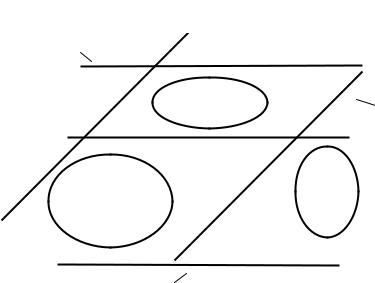
. Требуемое качество объекта, понимаемое в обобщенном смысле, (например, в смысле удовлетворения требуемой подсистеме целевых неравенств) в общем случае представляет собой несвязную область Ω в пространстве значений вектора z (рис. 3.6.3).
Выделение частных областей ωk Ω требуемого качества, например, на основе линейных дискриминантных функций сводится к решению
системы линейных неравенств |
|
|
|
|
||
cт z |
s |
0 : |
1, |
|
|
(3.12) |
|
|
|
|
|
||
cт z |
|
0 : |
0; |
s I |
|
|
s |
s |
. |
||||
|
|
|
|
|
||
Здесь с – вектор структурных параметров дискриминантной функции cт z , – характеристическая функция заданного качества, Is – индексное
множество наблюдений объекта управления.
Система неравенств является несовместной. Решением подобной системы является множество максимально совместных подсистем, каждое
307
из которых дает частное решение в виде вектора структурных параметров сk , определяющего частную дискриминантную функцию ckт z . В итоге будет получена совокупность частных дискриминантных функций
{cт z : k I |
max |
}, |
(3.13) |
k |
|
|
где Imax – индексное множество максимально совместных подсистем.
L2
L1
1 |
L5 |
|
L3 
2 |
3 |
|
L4
Рис. 3.6.3. Комитетное распознание несвязной области
Каждая частная дискриминантная функция при предъявлении конкретного значения вектора z «голосует» «за» или «против» принадлежности данного значения области качества Ω согласно правилу
cт z 0 : |
v |
k |
1, |
k |
|
(3.14) |
|
cт z 0 : |
|
|
|
v |
k |
0. |
|
k |
|
|
|
Комитетом дискриминантных |
функций называется такой набор |
||
дискриминантных функций из множества (3.13), что за принадлежность значений вектора z области качества Ω голосуют больше половины членов комитета.
430. В общем случае выдвижение идеи системного согласования частных решений представляет собой неформальный акт интуитивного поиска решения.
308

В этой связи обратим внимание, что исследования в области психологии решения задач51 показывают, что процесс решения, как правило, осуществляется в несколько стадий.
Первая стадия характеризуется попытками решения задачи на основе разнообразных ходов и приемов. Так как в общем случае с первой попытки задача в целом не решается, то на основе многочисленных попыток удается получить лишь частичные результаты. По мере накопления частичных результатов постепенно формируется общее видение контуров решения задачи. Наконец количественное накопление частных результатов приводит к качественному скачку. Наступает интуитивное озарение и рождается идея решения задачи. Выдвижение идеи решения задачи составляет вторую стадию процесса решения. На третьей стадии, исходя из полученной идеи, находится уже искомое решение – конкретный результат. Кроме того, возможен и прямой путь решения задачи, когда конкретное решение рождается непосредственно на основе интуитивного озарения после накопления частных результатов52. В этом случае говорят о двух стадиях процесса решения задач.
440. Указанная общая схема решения задач достаточно точно вписывается в ранее рассмотренный базовый логический модуль системного исследования.
Действительно, на первой стадии процесса решения происходит накопление частных результатов, определяющих в том или ином смысле частичные решения рассматриваемой задачи. Процесс накопления частных результатов заканчивается при достижении логической полноты множества частных результатов. Логическая полнота множества частных результатов состоит в том, что они должны в совокупности удовлетворять противоречивым условиям; кроме того, они должны образовывать полный конструктивный базис для искомого системного решения.
Получение логически полного множества частных результатов позволяет выдвинуть идею системного решения задачи. Выдвижение идеи системного решения, как уже отмечалось, составляет содержание интеллектуальной операции синтеза абстрактного. После этого на основе интеллектуальной операции конкретизации (движения от абстрактного к конкретному) определяется конкретное системное решение задачи. Указанное решение может быть получено также прямым путем на основе
51См., например, Hamel, R. On the development of knowledge during problem solving / R. Hamel, J. J. Elshout // European journal of cognitive psychology. – 2000. – 12
(3). – P. 289 – 322.
52Наглядным примером здесь может служить интеллектуальная игра – складывание кубика Рубика. Несмотря на развлекательный характер, данная игра является хорошим тестом на выявление психологических особенностей решения комбинаторных задач.
309
интеллектуальной операции синтеза конкретного. Оба пути решения задачи являются эквивалентными в том смысле, что приводят к одному и тому же результату. С математической точки зрения это означает коммутативность диаграммы интеллектуальных операций в процессе решения задач.
450. Рассмотрим вопрос - как возникают противоречия в постановках задач?
Противоречия возникают в процессе прогрессивного развития. Действительно, направление прогрессивного развития можно формализовано представить, как последовательность все более совершенных целей
0 1 2 . . . l . . . |
(3.10) |
Каждую цель l можно математически сформулировать, |
например, как |
целевую область в пространстве координат объекта управления, определяемую системой неравенств
|
|
|
l |
: |
y |
y |
y |
, |
i I l |
, |
(3.11) |
|
|
|
|
i,l |
i |
i,l |
|
нер |
|
|
|
где |
I l |
- индексное множество неравенств на l |
-ой стадии развития. |
|
|||||||
|
нер |
|
|
|
|
|
|
|
|
|
|
В процессе развития целевая область изменяется, при этом налагаются все более «сильные» ограничения на допустимые значения координат объекта. Это неизбежно приводит к противоречивым постановкам задач выбора решений.
460. Разрешение противоречий осуществляется на основе самоорганизации, формализованной схемой которой является рассмотренный ранее базовый логический модуль системного исследования. При этом происходит развитие, как самого объекта, так и знания о нем.
470. В начале изложения рассматриваемой логики решения задач мы полагали, что генеральная идея решения уже сформирована и целью системного исследования является разработка конкретных планов реализации данной идеи. В процессе развития исходной идеи мы пришли к противоречивым постановкам задач, решение которых требует генерации новых идей и соответственно разработки новых планов их реализации. Таким образом, процесс системного исследования итеративно повторяется, но уже на новом витке развития.
3.6.4.Использование целевых неравенств в задачах адаптации и самоорганизации в автоматических системах
310

480. Рассмотрим схему адаптивного управления при ведении технологических процессов (рис. 3.6.4).
Объект управления (Оb) здесь, как и ранее, характеризуется координатами: u - управляющее воздействие, z - внешнее возмущение, y - выходная реакция, а также состоянием . Функциональный контур управления (I) образуют устройства: управляющее (У), исполнительное (И) и наблюдающее (Н) на основе измерений. Соответственно yр - расчетное
задание, h - сигнал управления, внешнего возмущения объекта.
y, , z - оценки реакции, состояния и
aOb
Ad  Id
Id
cУopt |
III |
hs |
II |
z |
|
yр |
h |
u |
y |
|
У |
И |
Оb |
||
|
||||
|
|
|
( ) |
|
y, , z |
I |
|
|
|
|
|
|
||
|
|
Н |
|
Рис. 3.6.4. Схема адаптивного управления при ведении технологических процессов.
Неопределенность знания характеристик объекта может существенно препятствовать его эффективному управлению. Поэтому в состав системы управления вводится специальное устройство (Id), которое осуществляет идентификацию неизвестных характеристик объекта управления.
Идентификация характеристик объекта ( aOb ) осуществляется на
основе обработки информации о воздействиях ( u , z ) на объект (Ob) и его реакциях y . Идентификация может базироваться на активном эксперименте. В этом случае устройство идентификации вырабатывает специальные зондирующие сигналы ( hs ), которые подаются на объект
311
управления с целью выяснения его свойств. При пассивном эксперименте специальные зондирующие сигналы на объект не подаются, и ведется лишь пассивное наблюдение за процессами на управляемом объекте. Процессы идентификации образуют функциональный контур (II) адаптивной системы управления.
Далее, на основе информации ( aOb ) о реальных характеристиках
объекта специальное устройство адаптации (Ad) вырабатывает инструктивную информацию ( cУopt ) о желаемых характеристиках
управления. Инструктивная информация может вырабатываться с целью достижения экстремума некоторого показателя эффективности. Подобные адаптивные системы называются системами экстремального управления. В общем случае целью адаптации является достижение заданных технических условий при ведении технологического процесса. Процессы адаптации образуют функциональный контур (III) адаптивной системы управления.
Таким образом, адаптивная система управления характеризуется тремя функциональными контурами: I – собственно процессов управления, II – процессов идентификации, III – процессов адаптации. Характер связи указанных процессов может быть самым разнообразным.
Так, все три процесса могут одновременно реализовываться во времени. В этом случае осуществляется дуальное управление, так как собственно управление объектом служит одновременно и задаче идентификации его характеристик.
Анализ характеристик систем дуального управления является весьма сложным, поэтому на практике процессы собственно управления, процессы идентификации и адаптации стараются разнести либо по времени, либо по характеристикам сигналов. В этом случае процесс адаптивного управления характеризуется итеративной последовательностью процессов собственно управления, процессов идентификации и адаптации.
490. Включение в работу контуров идентификации и адаптации может осуществляться периодически с фиксированным интервалом времени либо по возникновению определенных событий, например, нарушения технических условий ведения технологического процесса вследствие изменения его характеристик. С формальной точки зрения процессы адаптации в данном случае можно математически представить, например, как процессы решения систем неравенств.
Предположим, как и ранее, что дана система целевых неравенств:
y y |
y , |
(4.1) |
||
i |
i |
|
i |
|
|
|
|||
yi |
fi (c), |
i Iнер ; |
|
|
|
|
312 |
|
|
которая представляет технические условия на ведение технологического процесса в виде технологических допусков на его параметры.
Если при управлении технологическим процессом текущее значение его параметров yi удовлетворяет техническим условиям (4.1), то контур
адаптации в работу не включается. При нарушении условий (4.1) включается контур адаптации, который формально осуществляет процесс решения соответствующей системы неравенств на основе выбора допустимых значений вектора настраиваемых параметров c .
500. Процесс решения системы неравенств может осуществляться, например, по следующему алгоритму.
Вводятся частные квадратичные невязки решений отдельных неравенств (4.1)
i |
|
yi |
yi 0 |
|
|
2 |
yi 0 |
y y |
|
|
|
|
|||
|
|
|
|
|
|
||||||||||
|
|
|
|
, |
|
|
|
|
|||||||
|
|
|
|
|
|
i |
i |
, |
i I |
|
. |
(4.2) |
|||
y |
y |
|
нер |
||||||||||||
|
|
|
|
2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
i |
i 0 |
|
|
|
|
|
|
|
|
|
|
|
|
Общая невязка решения системы неравенств (4.1) |
|
|
|||||||||||||
|
|
|
|
E2 i i . |
|
|
|
|
|
(4.3) |
|||||
|
|
|
|
|
|
|
|
i Iнер |
|
|
|
|
|
|
|
Здесь i - характеристическая функция i -го неравенства. |
|
||||||||||||||
В силу уравнений связи: |
yi fi (c), |
i Iнер , невязка решения (4.3) |
|||||||||||||
может быть определена на векторе c : |
|
|
|
|
|
|
|
||||||||
|
|
|
E2 (c) i (c) i (c) . |
|
|
|
(4.4) |
||||||||
|
|
|
|
|
|
|
|
i Iнер |
|
|
|
|
|
|
|
Решение системы неравенств (4.1) сводится к задаче нахождения |
|||||||||||||||
минимума ее невязки решения: |
|
|
|
|
|
|
|
|
|||||||
|
|
|
min E2 (c) 0 . |
|
|
|
|
|
(4.5) |
||||||
|
|
|
|
(c) |
|
|
|
|
|
|
|
|
|||
Решение уравнения (4.5) можно осуществить, например, на основе градиентного поиска.
В этом случае на основе решения задачи идентификации производится линеаризация зависимости невязки решения (4.5) в некоторой точке ck пространства аргументов (т. е. при фиксированном
E2 (c) i (ck ) i (ck ) aiт (ck )(с ck ) . |
(4.6) |
i Iнер |
|
Здесь ai (ck ) - вектор коэффициентов линеаризации функции i (c) в точке
ck . |
|
|
|
|
Рекуррентная формула поиска решения |
|
|
||
ck 1 ck |
i (ck )ai (ck ) , |
0 , |
k 1, 2, . . . , |
(4.7) |
i Iнер
313