

metoda / Ml_TAU_AKIT_2011
.pdfЧастотна передавальна функція ланки із запізненням дорівнює
W ( j ) k e j |
k(cos |
j sin ) |
(4.4) |
Прикладами ланки «чистого» запізнення є акустична лінія зв'язку (час проходження звуку), також це може бути система автоматичного дозування якої-небудь речовини, що переміщується за допомогою стрічкового транспортера (час руху стрічки на визначеній ділянці) та ін.
Часові характеристики будь-якої ланки із запізненням будуть такі ж, як і у відповідної ланки, але тільки зміщені по осі часу на величину запізнення. Розглянемо систему із запізненням, структурну схему якої подано на рис. 4.1.
|
|
k1 |
|
|
|
k2 (T2 s 1) |
|
|
k3e |
p |
|
|
k4 |
|
|
|
|
|
|
|
|
|
|||||||
|
T1s 1 |
|
|
T3 s 1 |
|
|
|
|
|
|
|
|||
– |
|
|
|
|
|
|
|
s |
||||||
Рисунок 4.1 – Структурна схема САУ із запізненням Передавальна функція розімкнутої системи дорівнює:
|
K (T2 s 1)e |
p |
|
|
W (s) |
|
W (s)e s , |
(4.5) |
|
|
|
|||
|
s(T1s 1)(T3 s |
1) |
op |
|
|
|
|
де Wop (s) – передавальна функція розімкнутої системи без запізнення;
K – коефіцієнт підсилення розімкнутої системи, K k1  k2
k2  k3
k3  k4 . Характеристичне рівняння замкнутої системи із запізненням є трансцен-
k4 . Характеристичне рівняння замкнутої системи із запізненням є трансцен-
дентним, тому алгебраїчні критерії стійкості (Гурвіца, Льєнара-Шипара) у цьому випадку незастосовні.
Для дослідження систем із запізненням на стійкість використовують частотні методи. Особливо зручні метод Найквіста і його різновид – використання логарифмічних частотних характеристик.
Частотна передавальна функція розімкненої системи:
W |
( j ) |
W ( j ) e j |
, |
(4.6) |
p |
|
op |
|
|
де Wop ( j ) – частотна передавальна функція системи без запізнення;
e j – частотна передавальна функція ланки з «чистим» запізненням. Можна переконатися, що модуль Wp ( j ) дорівнює модулю Wop ( j ) , тобто
– частотна передавальна функція ланки з «чистим» запізненням. Можна переконатися, що модуль Wp ( j ) дорівнює модулю Wop ( j ) , тобто
амплітудно-частотні характеристики системи без запізнення і системи із запізненням збігаються. Фазочастотна характеристика системи із запізненням відрізняється від фазочастотної характеристики системи без запізнення на величину .
41

( ) argWop ( j ) |
(4.7) |
ЛАЧХ системи із запізненням цілком збігається з ЛАЧХ тієї ж системи, але без запізнення.
Для побудови АФЧХ |
будь-якої лінійної САУ із запізненням потрібно |
побудувати характеристику |
відповідної звичайної системи, а потім кожну її |
точку змістити вздовж окружності за годинниковою стрілкою на кут , де – |
|
значення частоти коливань у даній точці характеристики. Оскільки на початку |
|
АФЧХ  0, а наприкінці
0, а наприкінці  , тому початкова точка залишається без змін, а кінець характеристики асимптотично навивається на початок координат.
, тому початкова точка залишається без змін, а кінець характеристики асимптотично навивається на початок координат.
Критичне значення запізнення визначається за формулою:
з
кр
з
рад ,
с
де |
з – частота зрізу розімкнутої системи без ланки «чистого» запізнення; |
з |
– запас стійкості по фазі розімкнутої системи без ланки «чистого» |
запізнення.
4.3 Опис лабораторної установки
Лабораторна робота виконується у середовищі Matlab за допомогою пакета моделювання динамічних систем Simulink. Опис лабораторної установки наведено в пункті 1.3.
4.4 Порядок виконання роботи і методичні вказівки з її виконання
Для заданого варіанта (табл. 4.1) побудувати ЛАЧХ і ЛФЧХ системи без ланки «чистого» запізнення, структурну схему якої зображено на рис. 4.1, а побудована Simulink-модель на рис. 4.2.
До складу віртуального лабораторного макета входять такі блоки:
–блок Step (з бібліотеки Simulink/Sources) – генератор одиничного ступінчастого сигналу;
–блок TransferFunction (з бібліотеки Simulink/Continuous) – передавальна
функція;
–блок Gain (з бібліотеки Simulink/Continuous) – задає коефіцієнт підсилення
системи;
–блок Subtract (з бібліотеки Simulink/Math Operations) – для створення від’ємного зв’язку;
42

– блок Scope (з бібліотеки Simulink/Sinks) – осцилограф для візуалізації процесу моделювання.
Рисунок 4.2 – Simulink-модель САУ без ланки «чистого» запізнення
З'ясувати, чи буде система стійкою при заданих значеннях параметрів. Для цього провести моделювання та проаналізувати перехідну характеристику САУ.
Визначити критичне значення запізнення. Для цього знайти запас стійкості по фазі з та частоту зрізу з (рис. 4.3). Для побудови частотних характеристик можна скористуватись графічним інтерфейсом Simulink LTI-Viewer.
Рисунок 4.3 – ЛАЧХ та ЛФЧХ системи без ланки «чистого» запізнення
43

Додати ланку запізнення у модель – блок Transport Delay з бібліотеки Simulink/Continuous (рис. 4.4). Для зміни значення запізнення необхідно відкрити блок для редагування (два рази натиснувши на ньому лівою кнопкою миші) та змінити значення Time Delay на розраховане критичне значення запізнення.
Рисунок 4.4 – Simulink-модель САУ з ланкою «чистого» запізнення
Провести моделювання системи при наступних значеннях запізнення:
0 , |
0,2 kp , |
0,4 kp , |
0,6 kp , |
kp . |
|
|
Таблиця 4.1 – Вихідні дані для виконання роботи |
|
|||||
|
|
|
|
|
|
|
Номер варіанта |
|
К |
Т1 |
Т2 |
Т3 |
|
|
|
|
|
|
|
|
1 |
|
|
100 |
2,4 |
0,8 |
0,10 |
|
|
|
|
|
|
|
2 |
|
|
90 |
2,6 |
1,0 |
0,15 |
|
|
|
|
|
|
|
3 |
|
|
80 |
2,8 |
1,2 |
0,20 |
|
|
|
|
|
|
|
4 |
|
|
100 |
3,2 |
1,4 |
0,20 |
|
|
|
|
|
|
|
5 |
|
|
90 |
2,8 |
1,4 |
0,20 |
|
|
|
|
|
|
|
6 |
|
|
80 |
3,2 |
1,8 |
0,25 |
|
|
|
|
|
|
|
7 |
|
|
70 |
1,0 |
І,6 |
1,20 |
|
|
|
|
|
|
|
8 |
|
|
100 |
1,4 |
0,8 |
0,1 |
|
|
|
|
|
|
|
4.5 Зміст звіту
Загальні правила оформлення матеріалів звіту наведено у вступі до методичних вказівок.
Утеоретичній частині потрібно навести часові та частотні характеристики ланки чистого запізнення.
В експериментальній частині слід навести графіки перехідного процесу за різних значень величини запізнення, розрахунок показників якості системи.
Увисновках проаналізувати, як впливає величина запізнення на якість перехідного процесу і стійкість системи.
44
4.6 Контрольні запитання та завдання
1.Що таке «чисте запізнення»? Приклади реальних систем із запізненням.
2.Тимчасові і частотні характеристики систем із запізненням.
3.Як впливає на частотні характеристики лінійної системи введення ланки із запізненням?
4.Як впливає збільшення величини запізнення на прямі і частотні показники якості?
5.Як оцінити стійкість систем із запізненням?
6.Як будується АФЧХ систем із запізненням?
45
5 ДОСЛІДЖЕННЯ ОСНОВНИХ ЗАКОНІВ УПРАВЛІННЯ В ЛІНІЙНИХ САУ
5.1 Мета роботи
Метою даної роботи є дослідження основних законів управління у лінійних САУ, визначення оптимальних параметрів регуляторів за заданими показниками якості.
5.2 Методичні вказівки з організації самостійної роботи студентів
Під час підготовки до лабораторної роботи студенти повинні повторити відповідний лекційний матеріал і дані практичних занять, ознайомитися з матеріалами, наведеними у літературі [3-9], зокрема такими: основні закони управління, типи промислових регуляторів, визначення показників якості системи у перехідному та сталому режимах.
Програмою досліджень лабораторної роботи є:
–побудова заданої структурної схеми САУ;
–визначення вимог до бажаного перехідного процесу у системі;
–визначення значень коефіцієнтів пропорційно-інтегро-диференціального (ПІД) регулятора за допомогою інтерактивного моделювання на підставі методики Зіглера–Ніколса;
–оптимізація параметрів ПІД регулятора;
–моделювання перехідних процесів системи під час пропорційного (П), інтегральногоу (І), пропорційно-інтегрального (ПІ) управління та розрахунок показників якості.
До виконання роботи студенти повинні знати основні закони управління та види регуляторів і вміти розраховувати показники якості у перехідному та сталому режимах.
Під законом управління розуміють алгоритм, згідно з яким пристрій управління (регулятор) формує вплив, що подається на вхід об'єкта управління.
Законом управління називається функціональна залежність вихідної величини пристрою управління від його вхідної величини, складена без урахування динамічних запізнень елементів пристрою управління.
На рис. 5.1 наведено класичну схему управління з одиничним негативним зворотним зв'язком.
46

|
e |
|
|
|
|
x |
|
g |
|
u |
Об’єкт |
||||
Пристрій |
|||||||
|
|||||||
|
|
||||||
– управління управління
управління управління
Рисунок 5.1 – Класична схема САУ
Вид передавальної функції пристрою управління визначає закон управління. На сьогодні у промисловості розрізняють чотири основні закони керування: пропорційний, інтегральний, пропорційно-інтегральний, пропорційно- інтегро-диференціальний.
При пропорційному законі управління передавальна функція пристрою управління або П-регулятора визначається за формулою:
WПУ (s) k .
При інтегральному законі управління передавальна функція пристрою управління або І-регуляторау визначається за формулою:
k WПУ (s) s .
При інтегральному законі управління пристрій управління виробляє сигнал, пропорційний інтегралу від похибки.
Порівняно із П-законом І-закон управління забезпечує астатизм системи, проте динамічні властивості системи з І-законом управління зазвичай гірші, ніж у системи з П-законом. Введення інтеграла у закон управління, як правило, підвищує коливальність системи і у деяких випадках може зробити систему нестійкою, якщо не вживати спеціальних заходів.
При пропорційно-інтегральному законі управління пристрій управління формує суму двох сигналів: пропорційного похибці та пропорційного інтегралу від похибки. Передавальна функція пристрою управління або ПІ-регулятора визначається за формулою:
WПУ (s) k1 ks2 .
За своїми властивостями пропорційно-інтегральна система у перехідному режимі наближається до системи із пропорційним управлінням, а у сталому режимі подібна до системи з інтегральним управлінням.
При пропорційно-інтегро-диференціальному управлінні пристрій управління формує сигнал, що дорівнює сумі трьох складових: пропорційної похибки,
47
інтегралу від похибки та похідної похибки. Передавальна функція пристрою управління або ПІД-регулятора визначається за формулою:
WПУ (s) k1 ks2 k3 s .
Введення у закон управління похідної від похибки збільшує швидкість реакції системи на зміну вхідного впливу, підвищує її швидкодію, при цьому зменшується похибка системи у динамічному режимі, покращуються її динамічні властивості.
5.3 Опис лабораторної установки
Лабораторна робота виконується у середовищі Matlab за допомогою пакета моделювання динамічних систем Simulink. Опис лабораторної установки наведено у пункті 1.3.
5.4 Порядок виконання роботи і методичні вказівки з її виконання
Побудуємо Simulink-модель САУ відповідно до схеми, |
поданої на |
|
рис. 5.2, помістивши у вікно моделі блоки Step |
(з бібліотеки Sources), Sum |
|
(з бібліотеки Math Operations), Transfer Fcn |
(з бібліотеки |
Continuous), |
PID Controller (з бібліотеки Simulink Extras/Additional Linear), Signal Constraint (з бібліотеки Simulink Resonse Optimization).
Рисунок 5.2 – Simulink-модель САУ
Змінюючи параметри ПІД-регулятора, дослідити П-, ПІ-, І-, ПІД-закони регулювання за перехідною характеристикою системи. Для цього необхідно задавати значення «1» чи «0» коефіцієнтів підсилення пропорційної, інтегруючої та диференціюючої складової.
48

Рисунок 5.3 – Настройкия блоку PID Controller для дослідження законів регулювання
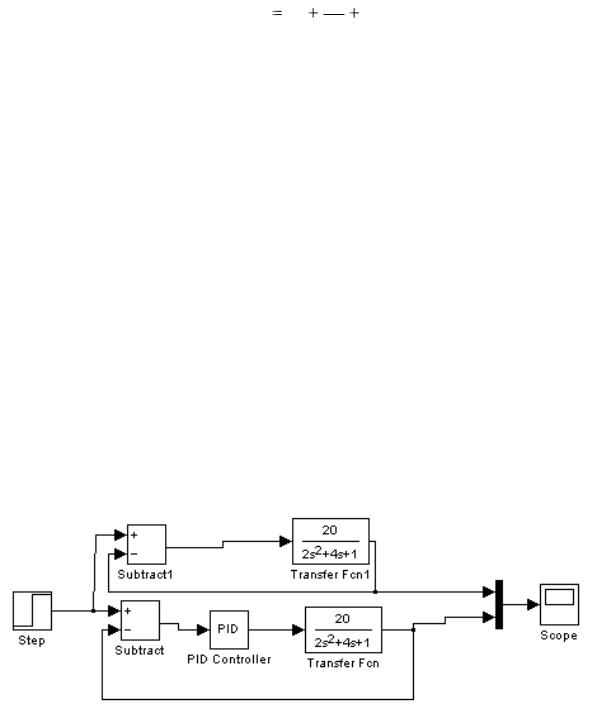
Зібрати схему (рис. 5.4) макета для дослідження оптимізації ПІД-регулятора.
Рисунок 5.4 – Макет для дослідження оптимізації ПІД-регулятора
Ініціалізувати у командному вікні Matlab змінні Kp=1; Ki=1; Kd=0, для чого перейти до командної строки Matlab та ввести команду
>> Kp=1; Ki=0; Kd=1;
Налаштуємо параметри блоку PID Controller (рис. 5.5), вводячи у поле параметра Proportional змінну Kp, у полі Integral – Ki, а у полі Derivative – Kd.
Рисунок 5.5 – Налаштування блоку PID Controller
49

Після подвійного натискання лівої клавіші миші на блоці Signal Constraint відкривається вікно блоку параметрів (рис. 5.6).
Рисунок 5.6 – Настройка параметрів системи
У вікні настройки параметрів можна задати границі для побудови перехідної характеристики досліджуваної системи із заданими прямими показниками якості. Для цього встановимо коридор, в межах якого має знаходитися вхідний сигнал блоку Signal Constraint відповідно до вимог завдання (додаток Г). Це можна зробити, пересуваючи за допомогою миші чорні лінії.
Натиснути для обрання параметрів оптимізації
Рисунок 5.7 – Процес вибору параметрів для оптимізації ПІД-регулятора
50