

Алгоритмы диагностирования и методы их построения
Любая задача
диагноза решается при помощи реализации
соответствующей процедуры, в основе
которой лежит алгоритм диагностирования,
который представляет собой совокупность
представляет собой совокупность
предписаний в виде последовательности
проверок и правил обработки их результатов.
Для получения общего результата
диагностирования. Различают алгоритмы
проверки исправности, работоспособности
и поиска неисправности. Их строят на
основе соответствующих тестов и словарей
неисправностей. На рис. 10 приведена
классификация алгоритмов диагностирования,
в соответствии с которой можно выделить
три вида алгоритмов: безусловный с
безусловной остановкой, безусловный с
условной остановкой и условный с условной
остановкой.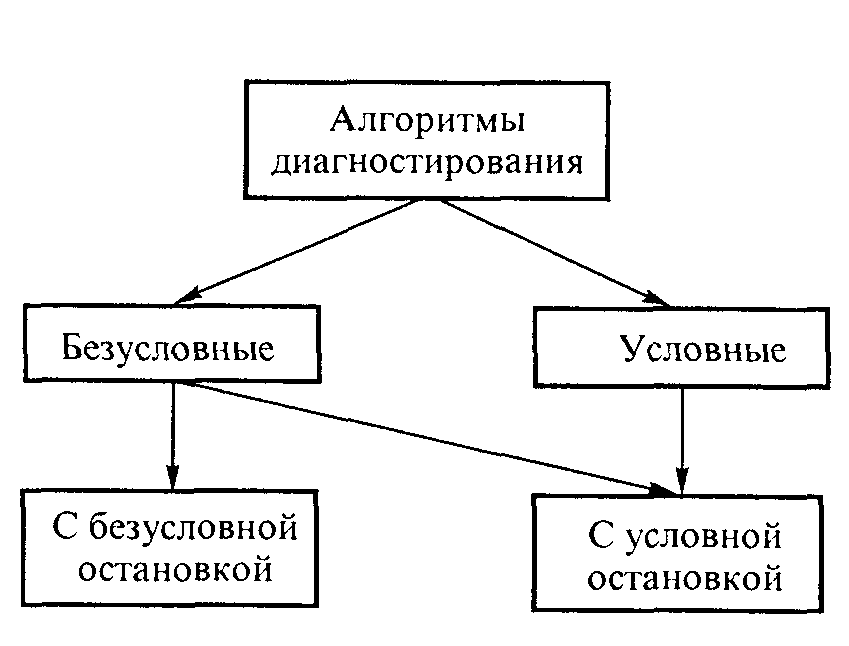
Рис. 10. Классификация алгоритмов диагностирования
Безусловный алгоритм задает одну фиксированную последовательность проведения проверок, при этом информация о техническом состоянии объекта фиксируется и обрабатывается последовательно независимо от результатов предыдущих проверок. В условном алгоритме предусматривается назначение каждой последующей проверки в зависимости от результата анализа предыдущих проверок.
Если заключение о техническом состоянии объекта может быть сделано только после проведения всех проверок, предусмотренных алгоритмом, то такой алгоритм называют алгоритмом с безусловной остановкой. Если выдача результата диагностирования возможна после выполнения каждого или некоторых промежуточных шагов алгоритма, то последний называют алгоритмом с условной остановкой. Условный алгоритм всегда является алгоритмом с условной остановкой.
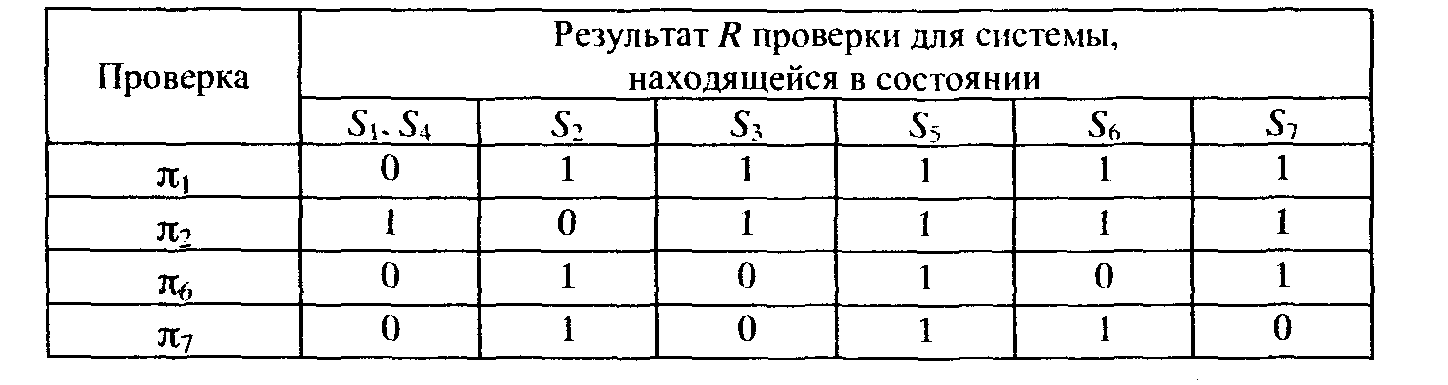
Наиболее распространенными формами представления алгоритмов диагностирования являются таблицы и древовидные графы. Безусловные алгоритмы с безусловной остановкой представляются в виде таблиц, в качестве которых, например, выступают словари неисправностей (табл. 1). В этом случае поиск неисправного элемента требует выполнения всего множества проверок, включенных в тест, с фиксацией их результатов. На основе анализа полной совокупности этих результатов делается вывод о месте неисправности.
Безусловный алгоритм с условной остановкой представляется в виде графа. Рассмотрим, например, граф (рис. 11а), который моделирует алгоритм поиска неисправности по табл. 1. Корневая вершина графа представляет множество S={S1,S2,...,S7} всех рассматриваемых технических состояний объекта, а остальные вершины - подмножества состояний, выделяемые в результате деления множества S и его подмножеств по результатам элементарных проверок. Висячие вершины соответствуют подмножествам эквивалентных состояний. Исходящими из вершин дугами изображаются элементарные проверки, а заходящими дугами — результаты этих проверок.
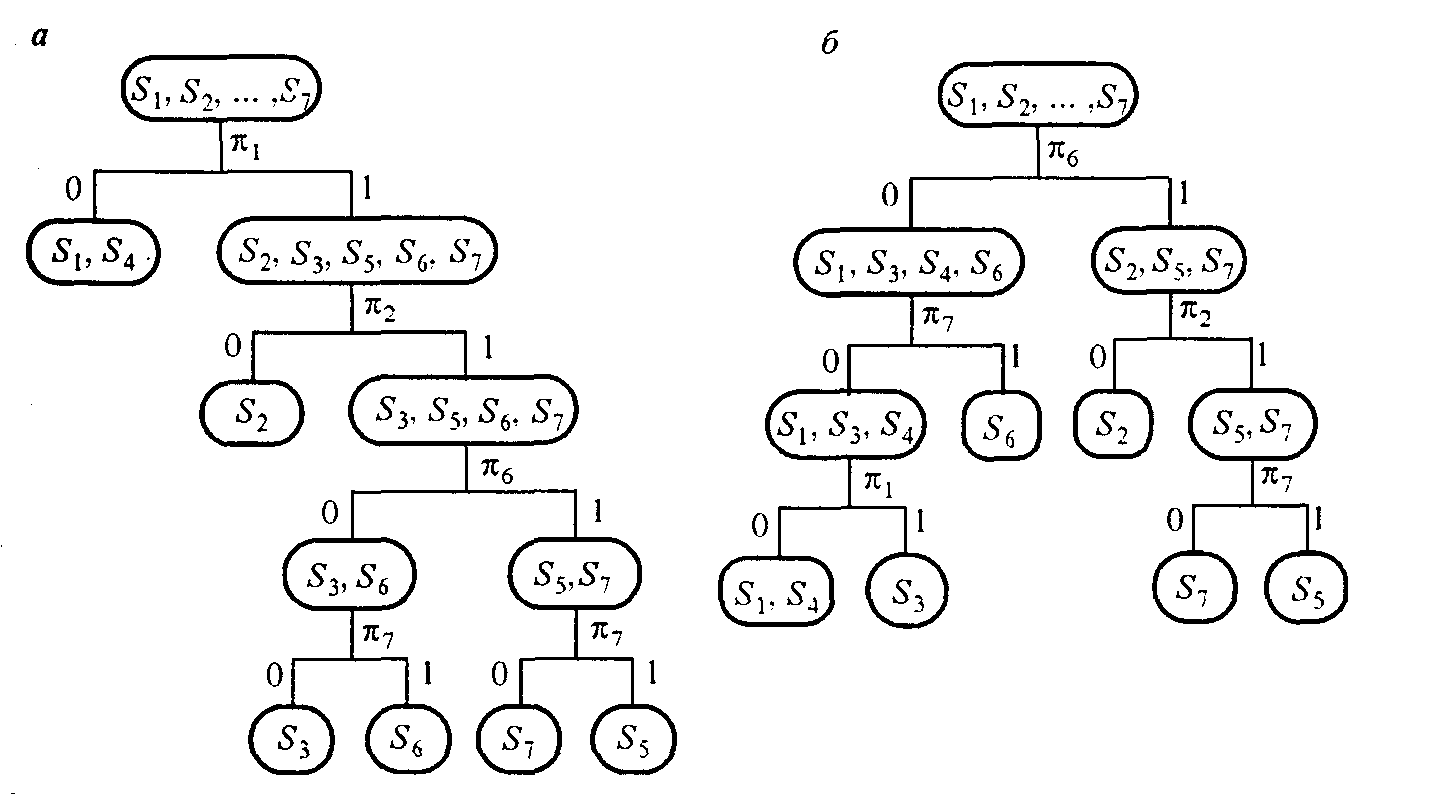
Рис. 11. Схемы безусловного (а) и условного (б) алгоритмов диагностирования
Заданный алгоритм предусматривает подачу проверок в фиксированной последовательности - 1 2 6 7 (так, как они расположены в табл. 1). Однако выполнение алгоритма может быть остановлено на любом этапе, если выделилось подмножество состояний, соответствующее висячей вершине. Так, на первом этапе алгоритма при выполнении проверки 1, получение результата 0 останавливает алгоритм, так как выделено подмножество эквивалентных состояний {S1, S4}. В противном случае применяют проверку 2 и алгоритм продолжается.
Таблица 1.
Условные алгоритмы также представляются в виде графов. Построение условного алгоритма начинается с выбора первой проверки. В зависимости от исхода первой проверки 1 множество возможных состояний S делится на два подмножества, после чего выбираются проверки (они могут быть разными), разделяющие эти подмножества. Выбор проверок продолжается до тех пор, пока множество S не будет разделено на отдельные подмножества эквивалентных состояний. На рис. 11б приведен условный алгоритм, построенный по табл. 1.
Для одного и того же словаря неисправностей может быть построено значительное количество безусловных и условных алгоритмов диагностирования. Каждый из них будет обладать определенными особенностями. Например, условный алгоритм (рис. 11б) имеет преимущество по сравнению с безусловным алгоритмом (рис. 11а), которое состоит в том, что в первом любая неисправность может быть обнаружена не более чем за три шага алгоритма, в то время как во втором может потребоваться выполнение и четырех шагов алгоритма. Но, с другой стороны, безусловный алгоритм дает возможность обнаружить неисправность уже при выполнении первого шага, а в условном алгоритме такой возможности нет.
При решении практических задач возникает проблема выбора оптимального алгоритма диагностирования. При этом формулируются либо ограничения на алгоритм, либо критерий оптимальности, в которых отражаются конкретные практические условия применения алгоритма. В качестве ограничения на алгоритм могут выступать: заданное время, в течение которого должна быть обнаружена любая неисправность; максимально допустимое число шагов алгоритма; ограничения, определяющие необходимость обнаружения на первых шагах алгоритма некоторых указанных неисправностей и т.п. В качестве критерия оптимальности может рассматриваться средняя стоимость обнаружения отказавшего элемента, вероятность обнаружения при ограниченной стоимости или стоимость с заданной вероятностью и т.д. В этом случае каждый алгоритм, заданный соответствующим графом, характеризуется определенным значением критерия оптимальности.