

2) Описать движения под током и в режиме выбега. Указать основные формулы для расчета удельного основного движения в этих режимах. Расчетные значения основного сопротивления движению
При выполнении тяговых расчетов удельное основное сопротивление движению вычисляют по эмпирическим формулам. Для отечественных типов ПС ГЭТ эти формулы сведены в таблицу 1, п – число вагонов в подвижном составе.
|
№
|
Тип ПС |
Удельное сопротивление движению, Н/кН | |
|
Движение под током |
Движение без тока | ||
|
1 |
Трамвай КТМ-5М |
|
|
|
2 |
Трамвай РВЗ |
|
|
|
3 |
Трамвай МТВ |
|
|
|
4 |
Троллейбус |
|
|
|
5 |
Вагоны метрополитена |
|
|







Метод выбега. При испытаниях выбирают ровный и горизонтальный участок пути или с небольшим и постоянным по значению уклоном (до 2‰). Подвижной состав разгоняют до небольшой скорости v и, начиная с этой скорости, осуществляют выбег. До полной остановки подвижной состав пройдет путь, равный l. Для упрощения расчетов в условиях депо при малых скоростях движение подвижного состава в период выбега считают равномерно замедленным и удельное сопротивление движению относят к средней скорости. Тогда замедление подвижного состава, м/с2,
 (1)
(1)
где l - путь, пройденный выбегом, м;
t - время движения в режиме выбега, с.
Удельное сопротивление движению определяют из основного уравнения движению в режиме выбега по формуле:
Подставляя значение (1) и определив значение 1/ζ = 102, получим, Н/кН:

Замерив секундомером время выбега и путь, пройденный при выбеге, подсчитывают среднее значение удельного сопротивления движению. Если рассчитанное значение сопротивления движению окажется больше нормированного для данного типа подвижного состава, то подвижной состав подвергают осмотру и ремонту. Метод выбега получил широкое применение для контроля технического состояния подвижного состава в условиях депо.
Расчетная часть.
Тип вагона метро Серия «Д».
Полная масса 56450 (кг); количество вагонов - 4.
Тип ТЭД метрополитена ДК-104Г.
1. Расчитать удельное основное сопротивление движению для заданного типа используя эмпирические формулы удельного основного сопротивления движению ( для режимов под током и без тока).
Под током.
При v = 0,

При v = 10,

При v = 20,

При v = 30,

При v = 40,

При v = 50,

При v = 60,

При v = 70,

Без тока.

При v = 0,

При v = 10,

При v = 20,

При v = 30,
 При
v
=
40,
При
v
=
40,
 При
v
=
50,
При
v
=
50,
 При
v
=
60,
При
v
=
60,
 При
v
=
70,
При
v
=
70,

Зависимость основного сопротивления движению под током и без тока от скорости
Часть 2.
Теоретическая часть.
1) Электромеханические характеристики на валу двигателя.
Электромеханическими характеристиками на валу электрического двигателя называются зависимости частоты вращения двигателя от тока п(I), вращающего момента от тока М(I) и коэффициента полезного действия (к. п. д.) от тока ηД(I) при напряжении питания, равном номинальному.
В электроподвижном составе ГЭТ в основном применяются двигатели постоянного тока. Они могут иметь следующие возбуждения: последовательное, параллельное, смешанное и независимое. Каждая система возбуждения обладает своими характерными особенностями, которые и определяют степень пригодности двигателя для той или другой цели.
Расчет электромеханических характеристик на валу тягового двигателя. Электродвижущая сила (э. д. с.) Е, индуктируемая в обмотке якоря машины постоянного тока, выражается как
Е = С'Фп, (1)
где
 - конструктивная постоянная тягового
двигателя; Ф - магнитный поток;п
-
частота вращения якоря.
- конструктивная постоянная тягового
двигателя; Ф - магнитный поток;п
-
частота вращения якоря.
В режиме тяги в двигателе происходит преобразование электрической энергии в механическую. Напряжение Uд, приложенное к двигателю, больше его электродвижущей силы, т. е. Uд > E. Уравнение электрического равновесия между приложенным к двигателю напряжением, электродвижущей силой и падением напряжения Ir в силовой цепи будет иметь вид:
 (2)
(2)
где
 -
падение
напряжения под щетками двигателя.
-
падение
напряжения под щетками двигателя.
Величина
 =
1,0
=
1,0 2,0В,
поэтому в практических расчетах этой
составляющей напряжения пренебрегают.
2,0В,
поэтому в практических расчетах этой
составляющей напряжения пренебрегают.
На основании уравнений (1) и (2) получаем выражение для частоты вращения якоря:
![]() ,
,
где I - ток якоря двигателя, А; r - активное сопротивление внутренней цепи двигателя, Ом; С'Ф - магнитный поток главных полюсов двигателя, В/(об/мин).
Вращающий момент М является одним из основных параметров двигателя, так как он определяет ток, потребляемый двигателем, а следовательно, и его мощность. Вращающий момент двигателя может быть рассчитан из условия равенства полезной механической мощности Рм и подведенной электрической мощности, умноженной на к. п. д. двигателя. Полезная механическая мощность
 ,
,
где
 - угловая скорость якоря, рад/с.
- угловая скорость якоря, рад/с.
Следовательно, полезную механическую мощность, Вт, можно выразить как:
![]() .
.
С другой стороны полезная электрическая мощность определяется как:
 .
.
Приравняв левые части выражений, получим:

откуда вращающий момент, Н·м,
![]() .
.
Вращающий момент М можно также определить по электромагнитному вращающему
моменту Мэм т. е. моменту, который развивал бы двигатель при отсутствии механических и магнитных потерь:
М = Мэм - ΔM,
где
 -
электромагнитный момент, создаваемый
электромагнитной мощностьюР
=
EI;
ΔM
-
момент, создаваемый магнитными и
механическими потерями
-
электромагнитный момент, создаваемый
электромагнитной мощностьюР
=
EI;
ΔM
-
момент, создаваемый магнитными и
механическими потерями
 .
Следовательно, вращающий момент, Н∙м,
.
Следовательно, вращающий момент, Н∙м,
 .
.
Коэффициент полезного действия двигателя ηд представляет собой отношение полезной мощности к подведенной. При тяговом режиме это будет отношение полезной механической мощности Рм к электрической:
 ,
,
где
 - сумма соответственно электрических,
механических и магнитных потерь в
двигателе.
- сумма соответственно электрических,
механических и магнитных потерь в
двигателе.
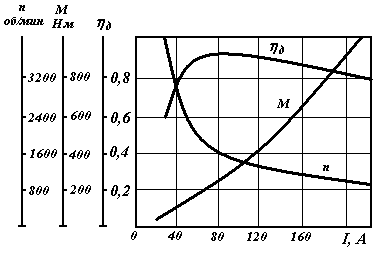
Рис. 1. Электромеханические характеристики на валу двигателя ДК-254Б