Список использованной литературы
Кирсанов М.Н. Решебник. Теоретическая механика // Под ред. А.И.Кириллова. – М.: ФИЗМАТЛИТ, 2002. – 381 с.
Сборник заданий для курсовых работ по теоретической механике: Учеб. пособие для технических вузов // Под ред. А.А. Яблонского. – М.: Интеграл-Пресс, 2006. – 382 с.
Яблонский А.А., Никифорова В.М. Курс теоретической механики: Учебник для вузов, – М.: Интеграл-Пресс, 2006. – 608 с.
Курс теоретической механики // Под ред. Колесникова К.С. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. – 735с.
Тарг С.М. Краткий курс теоретической механики: Учебник для вузов, 2003. – 416 с.
Приложение 1
|
Вариант 1 х= t-2 см; y=(2+2t)2см; t1=1c. |
Вариант 7 х= 2-tсм; y=2sin(t/2) см; t1=1 c. |
Вариант 13 х= 4-2tсм; y= 1/(2+3t) см; t1=1c. |
Вариант 19 х= 4-2tсм; y=2/tсм; t1=1c. |
Вариант 25 х= t-1 см; y=2-t3см; t1=1c. |
|
Вариант 2 х= t-4 см; y= 2-t3см; t1=1c. |
Вариант 8 х= 3-2tсм; y=(2+t)2см; t1=1c. |
Вариант 14 х= t-4 см; y= 1/(t+1) см; t1=1c. |
Вариант 20 х=3-tсм; y= 1/tсм; t1=1c. |
Вариант 26 х= tсм; y=2cos(t/6) см; t1=1c. |
|
Вариант 3 х= 4-2tсм; y= (2+3t)2см; t1=1c. |
Вариант 9 х= 4-2tсм; y= 2t3см; t1=1c. |
Вариант 15 х= 2-t3см; y= 2-tсм; t1=1c. |
Вариант 21 х= t-2 см; y= 1/(2+2t) см; t1=1c. |
Вариант 27 х=2-tсм; y=2cos(t/2) см; t1=1 c. |
|
Вариант 4 х= t-4 см; y=(t+1)3см; t1=1c. |
Вариант 10 х= 3-tсм; y=t3см; t1=1c. |
Вариант 16 х=2-3 tсм; y=3sin(t/4) см; t1=1c. |
Вариант 22 х= t-4 см; y=1 /(2-t) см; t1=1c. |
Вариант 28 х=3-2tсм; y= 4/(2+t)2см; t1=1c. |
|
Вариант 5 х= 2-tсм; y= 2-t3см; t1=1c. |
Вариант 11 х= 5t-2 см; y=(3+2t)2см; t1=1c. |
Вариант 17 х= 2-tсм; y=2cos(t/2) см; t1=1 c. |
Вариант 23 х= 2 sin(πt/4) см; y= 3 cos (πt/4) см; t1=1 c. |
Вариант 29 x=6sin(t/6) y=4cos(t/) t1=2c |
|
Вариант 6 х= 2-tсм; y= 2sin(t/4) см; t1=1c. |
Вариант 12 х=2t-4 см; y=2-t2см; t1=1c. |
Вариант 18 х= (2+t)2см; y= 3-2tсм; t1=1c. |
Вариант 24 х= 5 sin(πt/3) см; y= -5 cos (πt/3) см; t1=1 c. |
Вариант 30 x=4-tсм y= (t+1) 2 cм t1=2c |
Приложение 2
|
Вариант 1 |
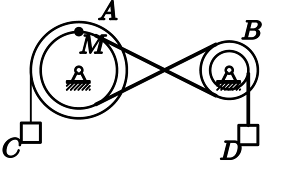
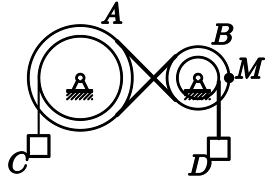
Механическая передача состоит из шкива A(RA=40 см,rA=30 см), шкиваB(RB=25 см,rB= 10 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=100t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 2 |
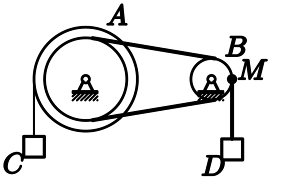
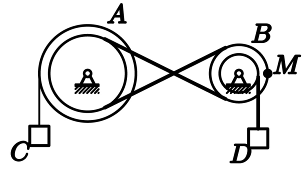
Шкив A(RA=40 см,rA=30 см) соединен со шкивомB(RB=25 см,rB= 10 см) ремнем. ГрузCопускается с переменной скоростьюVC=20t2см/с . НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 3 |
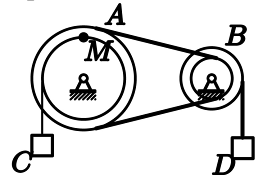
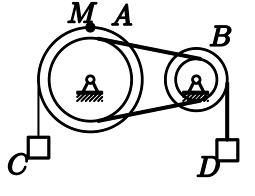
Механическая передача состоит из шкива A(RA=40 см,rA=30 см), шкиваB(RB=25 см,rB= 10 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=100t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 4 |
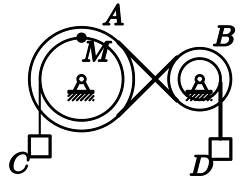
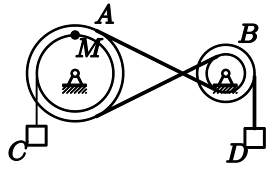
Шкив A(RA=40 см,rA=30 см) соединен со шкивомB(RB=25 см,rB= 10 см) ремнем. ГрузCопускается с переменной скоростьюVC=16t2см/с . НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 5 |
Движение шкива A(RA=25 см,rA=15 см) передается ремнем шкивуB(RB=10 см,rB= 8 см). Скорость груза увеличиваетсяVC=24t3см/с. НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 6 |
Механическая передача состоит из шкива A(RA=40 см,rA=30 см), шкиваB(RB=25 см,rB= 10 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=40t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 7 |
Механическая передача состоит из шкива A(RA=25 см,rA=15 см), шкиваB(RB=10 см,rB= 8 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=32t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 8 |
Шкив A(RA=20 см,rA=16 см) соединен со шкивомB(RB=15 см,rB= 5 см) ремнем. ГрузCопускается с переменной скоростьюVC=10t2см/с . НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 9 |
Движение шкива A(RA=30 см,rA=20 см) передается ремнем шкивуB(RB=15 см,rB= 6 см). Скорость груза увеличиваетсяVC=45t3см/с. НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 10 |
Шкив A(RA=20 см,rA=16 см) соединен со шкивомB(RB=15 см,rB= 5 см) ремнем. ГрузCопускается с переменной скоростьюVC=30t2см/с . НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 11 |
Механическая передача состоит из шкива A(RA=20 см,rA=16 см), шкиваB(RB=15 см,rB= 5 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=20t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 12 |
Движение шкива A(RA=20 см,rA=16 см) передается ремнем шкивуB(RB=15 см,rB= 5 см). Скорость груза увеличиваетсяVC=15t3см/с. НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 13 |
Механическая передача состоит из шкива A(RA=30 см,rA=20 см), шкиваB(RB=15 см,rB= 6 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=24t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 14 |
Механическая передача состоит из шкива A(RA=25 см,rA=15 см), шкиваB(RB=10 см,rB= 8 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=32t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 15 |
Шкив A(RA=30 см,rA=20 см) соединен со шкивомB(RB=15 см,rB= 6 см) ремнем. ГрузCопускается с переменной скоростьюVC=30t2см/с . НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 16 |
Механическая передача состоит из шкива A(RA=25 см,rA=15 см), шкиваB(RB=10 см,rB= 8 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=40t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 17 |
Механическая передача состоит из шкива A(RA=40 см,rA=30см), шкиваB(RB=25 см,rB= 10 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=40t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 18 |
Шкив A(RA=30 см,rA=20 см) соединен со шкивомB(RB=15 см,rB= 6 см) ремнем. ГрузCопускается с переменной скоростьюVC=12t2см/с . НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 19 |
Механическая передача состоит из шкива A(RA=25 см,rA=15 см), шкиваB(RB=10 см,rB= 8 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=40t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 20 |
Механическая передача состоит из шкива A(RA=20 см,rA=16 см), шкиваB(RB=15 см,rB= 5 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=20t4см/с. НайтиVCиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 21 |
Движение шкива A(RA=25 см,rA=15 см) передается ремнем шкивуB(RB=10 см,rB= 8 см). Скорость груза увеличиваетсяVC=24t3см/с. НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 22 |
Шкив A(RA=25 см,rA=15 см) соединен со шкивомB(RB=10 см,rB= 8 см) ремнем. ГрузCопускается с переменной скоростьюVC=20t2см/с . НайтиVDиaMчерез 1 с после начала движения. | ||
|
| |||
|
Вариант 23 |
Шкив A(RA=25 см,rA=15 см) соединен со шкивомB(RB=10 см,rB= 8 см) ремнем. ГрузCопускается с переменной скоростьюVC=16t2см/с . НайтиVDиaMчерез 1 с после начала движения | ||
|
| |||
|
Вариант 24 |
Шкив A(RA=20 см,rA=16 см) соединен со шкивомB(RB=10 см,rB= 5 см) ремнем. ГрузCопускается с переменной скоростьюVC=30t2см/с . НайтиVDиaMчерез 1 с после начала движения | ||
|
| |||
|
Вариант 25 |
Механическая передача состоит из шкива A(RA=30 см,rA=20 см), шкиваB(RB=15 см,rB= 6 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=60t4см/с. НайтиVCиaMчерез 1 с после начала движения. |
| |
|
|
| ||
|
Вариант 26 |
Шкив A(RA=40 см,rA=30 см) соединен со шкивомB(RB=25 см,rB= 10 см) ремнем. ГрузCопускается с переменной скоростьюVC=20t2см/с . НайтиVDиaMчерез 1 с после начала движения. |
| |
|
|
| ||
|
Вариант 27 |
Шкив A(RA=30 см,rA=20 см) соединен со шкивомB(RB=15 см,rB= 6 см) ремнем. ГрузCопускается с переменной скоростьюVC=12t2см/с . НайтиVDиaMчерез 1 с после начала движения. |
| |
|
|
| ||
|
Вариант 28 |
Шкив A(RA=30 см,rA=20 см) соединен со шкивомB(RB=15 см,rB= 6 см) ремнем. ГрузCопускается с переменной скоростьюVC=12t2см/с . НайтиVDиaMчерез 1 с после начала движения. |
| |
|
|
| ||
|
Вариант 29 |
Движение шкива A(RA=40 см,rA=30 см) передается ремнем шкивуB(RB=25 см,rB= 10 см). Скорость груза увеличиваетсяVC=30t3см/с. НайтиVDиaMчерез 1 с после начала движения. |
| |
|
|
| ||
|
Вариант 30 |
Механическая передача состоит из шкива A(RA=20 см,rA=16 см), шкиваB(RB=15 см,rB= 5 см), соединенных ремнем, и двух грузовCиD. ГрузDопускается с переменной скоростьюVD=60t4см/с. НайтиVCиaMчерез 1 с после начала движения. |
| |
|
|
| ||