

Задание к-2. Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях.
Механизм состоит из двух вращающихся
на неподвижных осях блоков, соединенных
нерастяжимым ремнем. Блоки передают
движение грузам (![]()
![]() ).Задан закон измененияскорости грузаD
).Задан закон измененияскорости грузаD![]() . Найти
. Найти![]() и
и![]() через1спосле начала движения.
через1спосле начала движения.
Схемы механизмов приведены в Приложении 2.
По заданной скорости груза D определяем угловую скорость блока В:
![]() .
.
Определяем угловую скорость блока А, связанного нерастяжимой нитью с блокомВ. Для этого составляем передаточное отношение, учитывая взаимосвязь блоков по схеме механизма:
![]() .
.
Определяем скорость груза С, подвешенного на большом радиусе блока А
![]()
|
|
|
Рис.2 |

Находим угловое ускорение блока В, дифференцируя по времени выражение его угловой скорости
![]() .
.
Определяем центростремительное
 ,
вращательное
,
вращательное и полное
и полное ускорение
точкиМ, находящейся на внешнем
ободе блокаВ.
ускорение
точкиМ, находящейся на внешнем
ободе блокаВ.
![]() ;
;
![]() ;
;
![]() .
.
Изображаем на схеме механизма направления вращений блоков АиВ, а также вектора центростремительного
 ,
вращательного
,
вращательного и полного
и полного ускорений
точкиМ.
ускорений
точкиМ.
Ответы заносим в таблицу. Угловая
скорость – в
![]() ,
угловое ускорение – в
,
угловое ускорение – в![]() ,
скорость поступательного движения
телаC – в
,
скорость поступательного движения
телаC – в![]() ,
ускорение точкиМ– в
,
ускорение точкиМ– в![]() .
.
Таблица 2
|
|
|
|
|
|
|
|
|
6,0 |
4,0 |
120,0 |
16,0 |
240,0 |
240,0 |
339,4 |
Задание к-4. Кинематический анализ многозвенного механизма
Кривошип ОА вращается с постоянной
угловой скоростью
![]() .
Для заданного положения механизма
определить:
.
Для заданного положения механизма
определить:
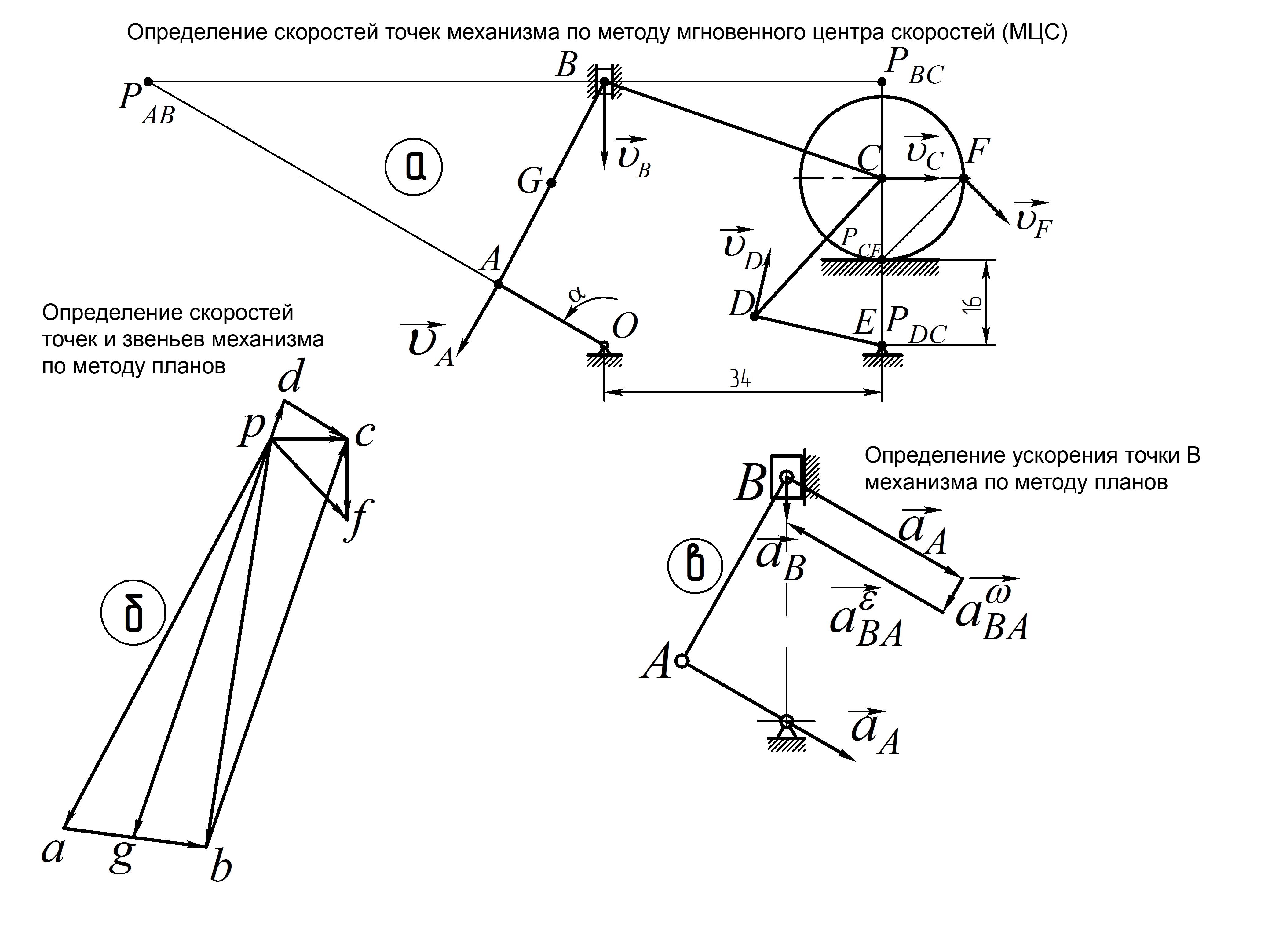
скорости точек А, В, С, … механизма и угловые скорости всех его звеньев с помощью плана скоростей;
скорости этих же точек механизма и угловые скорости звеньев с помощью мгновенных центров скоростей;
ускорения точек А и В и угловое ускорение звена АВ.
|
|
|
Рис.3 |

Схемы механизмов и необходимые размеры звеньев приведены в Приложении 3.
Определяем скорости точек и угловые скорости звеньев с помощью плана скоростей. Строим схему механизма в выбранном масштабе и вычисляем скорость точки АкривошипаОА
![]()
Вектор
![]() перпендикуляренОА и направлен в
сторону вращения кривошипа. Строим план
скоростей. Из произвольно выбранного
полюса, точкиРв выбранном масштабе
проводим отрезокРа, изображающий
скорость точкиА. Для определения
скорости точкиВ через точкуР
проводим прямую, параллельную вектору
скорости
перпендикуляренОА и направлен в
сторону вращения кривошипа. Строим план
скоростей. Из произвольно выбранного
полюса, точкиРв выбранном масштабе
проводим отрезокРа, изображающий
скорость точкиА. Для определения
скорости точкиВ через точкуР
проводим прямую, параллельную вектору
скорости![]() точкиВ, через точкуа– прямую,
перпендикулярную звенуАВ. На
пересечении получаем точкуb,отрезокРbопределяет
скорость точки В. Измеряем длину отрезкаРbи, пользуясь
масштабом скоростей, находим
точкиВ, через точкуа– прямую,
перпендикулярную звенуАВ. На
пересечении получаем точкуb,отрезокРbопределяет
скорость точки В. Измеряем длину отрезкаРbи, пользуясь
масштабом скоростей, находим![]() .
Для определения скорости токиG
делим отрезокаb
плана скоростей в отношении
.
Для определения скорости токиG
делим отрезокаb
плана скоростей в отношении![]() .
ОтрезокРg
изображает скорость точкиG,
делящей звеноАВпополам. Пользуясь
масштабомскоростей,
находим
.
ОтрезокРg
изображает скорость точкиG,
делящей звеноАВпополам. Пользуясь
масштабомскоростей,
находим
![]() .
Продолжая построение плана скоростей
(Рис.4б), находим скорости точек С иD.
Результаты представлены в таблице 3,
направления векторов скоростей точек
– на рис.4а.
.
Продолжая построение плана скоростей
(Рис.4б), находим скорости точек С иD.
Результаты представлены в таблице 3,
направления векторов скоростей точек
– на рис.4а.
Таблица 3
|
Метод определения |
Скорости точек, см/с | |||
|
B |
C |
D |
F | |
|
По плану скоростей |
48,0 |
12,0 |
7,0 |
17,0 |
|
При помощи МЦС |
50,1 |
11,95 |
7,35 |
16,8 |
Чтобы определить угловые скорости звеньев механизма, необходимо вращательные скорости звеньев, которые на плане скоростей изображаются отрезками ab, bc, cd, разделить на длины соответствующих звеньев.
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
|
|
|
Рис.4 |
Угловую скорость звена DEопределяем по вращательной скорости точкиDвокруг неподвижного центраЕ
![]() .
.
Результаты расчетов занесены в таблицу 4.
Определяем скорости точек и угловые скорости звеньев механизма с помощью мгновенных центров скоростей.
Чтобы определить положение мгновенных центров скоростей, строим механизм в выбранном масштабе и для каждого звена определяем точку пересечения перпендикуляров к направлениям двух векторов скоростей точек этого звена. Мгновенные центры скоростей звеньев механизма приведены на рисунке 4а. Скорости точек пропорциональны их расстояниям до мгновенного центра скоростей. Исходя из этого, можно составить соотношения, с помощью которых определить скорость одной из точек звена, если известна скорость другой точки. Например,
![]() ;
;
![]() ;
;
![]() .
.
Скорость точки F, расположенной на колесе радиусомRопределяется через угловую скорость этого колеса
![]() .
.
Определив скорости точек механизма, можно найти и угловые скорости звеньев. Для этого необходимо разделить скорость одной из точек звена на расстояние от этой точки до мгновенного центра скоростей. Например,
![]() ;
;
![]() ;
;
![]() .
.
Результаты расчетов приведены в таблице 4.
Таблица 4
|
Метод определения |
Угловые скорости звеньев, рад/с | |||
|
AB |
BC |
DC |
Колесо | |
|
По плану скоростей |
0,93 |
1,39 |
0,48 |
1,20 |
|
При помощи МЦС |
0,97 |
1,42 |
0,46 |
1,20 |
Определяем ускорения точек АиВ. Кривошип ОА вращается равномерно, поэтому точка А будет иметь только нормальное ускорение
![]() .
.
Ускорение точки Вопределяем по теореме о сложении ускорений при плоскопараллельном движении твердого тела
![]()
Центростремительное ускорение точки Вво вращательном движении шатуна относительно полюсаАнаправлено от точкиВк полюсуАи определяется по формуле
![]() .
.
Строим план ускорений для определения
ускорения точки В. Вращательное
ускорение звенаАВ![]() известно только по направлению. Оно
располагается всегда перпендикулярно
к звену. Результирующий вектор ускорения
точкиВрасполагается на траектории
этой точки, которая вместе с ползуном
совершает возвратно-поступательное
движение. План ускорений приведен на
рис. 4в. Из плана ускорений, пользуясь
масштабом, определяем модуль вращательного
ускорения звенаАВ
известно только по направлению. Оно
располагается всегда перпендикулярно
к звену. Результирующий вектор ускорения
точкиВрасполагается на траектории
этой точки, которая вместе с ползуном
совершает возвратно-поступательное
движение. План ускорений приведен на
рис. 4в. Из плана ускорений, пользуясь
масштабом, определяем модуль вращательного
ускорения звенаАВ![]() ,
а затем и его угловое ускорение
,
а затем и его угловое ускорение
![]() .
.