

2.2.2. Определение скорости точки при задании её движения координатным способом
Учитывая известную из математики теорему о том, что проекция производной от вектора на какую-либо неподвижную ось равна производной от проекции вектора на ту же ось, а также выражение для вектора скорости через его проекции на оси координат
![]() ,
(11)
,
(11)
и уравнения(3), (6) и (10) получим выражения для определения проекций скорости на оси координат
![]() ;
;
![]() ;
;
![]() (12)
(12)
Проекции скорости точки на неподвижные оси координат равны первым производным от соответствующих координат точки по времени.
Сокращённо можно получить:
![]()
 ,
,
![]() ,
,![]() .(13)
.(13)
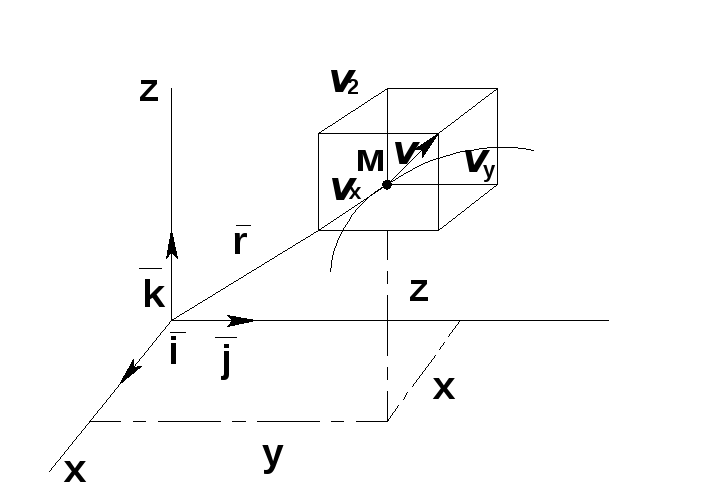
Построив
прямоугольный параллелепипед, рёбра
которого параллельны осям координат,
а диагональ совпадает со скоростью
![]() ,
получим проекции скорости на соответствующие
оси координатvX,
vY,
vZ.
,
получим проекции скорости на соответствующие
оси координатvX,
vY,
vZ.
Тогда модуль скорости точки:
![]() .
(14)
.
(14)
Направление вектора можно вычислить по соответствующим формулам:
 (15)
(15)
2.2.3. Определение скорости точки при задании её движения естественным способом
Для
определения скорости точки в случае,
когда движение задано естественным
способом, необходимо чтобы было известно:
траектория движения АВ,
начало и направление отсчёта дуговой
координаты, и уравнение движения точки
![]() (см. рис. 6).
(см. рис. 6).
П
Рис.
6
занимает положение М, в момент времени t1 = t + ∆t – положение М1. Соответственно дуговые координаты этих положений точки имеют значения:
S = OM; S1 = OM1 = OM + MM1 = S + S,
где S – приращение дуговой координаты
S =ММ1.
Проведя
из центра С
в точку М
радиус-вектор
![]() ,
определим скорость точки в момент
времениt
,
определим скорость точки в момент
времениt
![]() .
(16)
.
(16)
Так
как радиус-вектор
![]() зависит от дуговой координатыS,
т.е.
зависит от дуговой координатыS,
т.е.
![]() ,
то:
,
то:
![]() ,
(17)
,
(17)
где
![]()
![]() .
.
По
направлению вектор
![]() совпадает с вектором
совпадает с вектором![]() ,
но
,
но![]() ,
т.е. вектор
,
т.е. вектор![]() имеет модуль, равный единице и направлен
по касательной к кривойАВ
в сторону увеличения дуговой координаты.
Кроме того, вектор
имеет модуль, равный единице и направлен
по касательной к кривойАВ
в сторону увеличения дуговой координаты.
Кроме того, вектор
![]() является ортом этого направления.
Обозначим этот орт
является ортом этого направления.
Обозначим этот орт![]() (см.
рис. 6). Используя формулу(17)
можно показать, что
(см.
рис. 6). Используя формулу(17)
можно показать, что
![]() ,
(18)
,
(18)
где
производная
![]() представляет собой проекцию вектора
скорости
представляет собой проекцию вектора
скорости![]() на касательную:
на касательную:
![]() .
(19)
.
(19)
Тогда модуль вектора скорости равен абсолютному значению производной от дуговой координаты точки по времени:
![]() (20)
(20)
2.3. Определение ускорения точки
2.3.1. Определение ускорения точки при векторном способе задания ее движения
Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления вектора скорости точки.
П
Рис.
7
![]() ,
а в момент времени t1
приходит в положение М1
и имеет скорость
,
а в момент времени t1
приходит в положение М1
и имеет скорость
![]() ,
тогда за промежуток времени Δt
= t1-t
скорость точки получает приращение
,
тогда за промежуток времени Δt
= t1-t
скорость точки получает приращение
![]() .
Вектор
.
Вектор![]() всегда
направлен в сторону вогнутости траектории
точки.
всегда
направлен в сторону вогнутости траектории
точки.
Отношение
приращения вектора скорости
![]() к
соответствующему промежутку времениΔt
определяет вектор среднего ускорения
точки за этот промежуток времени:
к
соответствующему промежутку времениΔt
определяет вектор среднего ускорения
точки за этот промежуток времени:
![]() (21)
(21)
Вектор
среднего ускорения имеет, очевидно, то
же направление, что и вектор![]() ,
то есть направлен в сторону вогнутости
траектории точки.
,
то есть направлен в сторону вогнутости
траектории точки.
Ускорением
точки в данный момент времени t
называется векторная величина, к которой
стремится среднее ускорение
![]() при
стремлении промежутка времениΔt
к нулю.
при
стремлении промежутка времениΔt
к нулю.
![]()
![]()
![]() (22)
(22)
Следовательно, вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени.
Найдем
как располагается вектор
![]() по отношению к траектории точки. При
прямолинейном движении вектор
по отношению к траектории точки. При
прямолинейном движении вектор
![]() направлен вдоль прямой, по которой
движется точка. Если траекторией точки
является плоская кривая, то вектор
ускорения
направлен вдоль прямой, по которой
движется точка. Если траекторией точки
является плоская кривая, то вектор
ускорения
![]() ,
также как и вектор
,
также как и вектор
![]() лежит в плоскости этой кривой и направлен
в сторону ее вогнутости. Если траектория
не является плоской кривой, то вектор
лежит в плоскости этой кривой и направлен
в сторону ее вогнутости. Если траектория
не является плоской кривой, то вектор![]() будет направлен в сторону вогнутости
траектории и будет лежать в плоскости,
проходящей через касательную к траектории
в точкеМ и
прямую, параллельную касательной в
соседней точке М1.
В
пределе, когда точка М1
стремится
к М
эта плоскость занимает положение так
называемой соприкасающейся плоскости.
Следовательно, в общем случае вектор
ускорения
будет направлен в сторону вогнутости
траектории и будет лежать в плоскости,
проходящей через касательную к траектории
в точкеМ и
прямую, параллельную касательной в
соседней точке М1.
В
пределе, когда точка М1
стремится
к М
эта плоскость занимает положение так
называемой соприкасающейся плоскости.
Следовательно, в общем случае вектор
ускорения
![]() лежит в соприкасающейся плоскости и
направлен в сторону вогнутости кривой.
лежит в соприкасающейся плоскости и
направлен в сторону вогнутости кривой.