

ОтчётСУХТП
.docxРОССИЙСКИЙ ХИМИКО-ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ им. Д.И.МЕНДЕЛЕЕВА
Кафедра общей химической технологии
Группа Э-44;
Журавлёва Фаина;
Манукян Галина;
Евдокимова Светлана.
Лабораторная работа №1
Регулирование температуры.
Москва, 2015
Задание
-
Получение переходной характеристики объекта по каналу регулирования. Определение по ней параметров настройки ПИД-регулятора.
-
Получение переходной характеристики системы регулирования в динамическом режиме. Определить показатели качества регулирования.
-
Изучить влияние настройки регулятора на качество регулирования процесса.
Описание установки.


Функциональная схема: F1 F2
X U
Y


Регулятор

Исполнительное устройство

Объект



Датчик температуры

Y
-
Регулируемая величина У – температура;
-
Задающее воздействие Х;
-
Управляющее воздействие U – длительность импульса напряжения (мощность), подаваемые на нагревательный элемент;
-
Возмущающее воздействие Fi – изменение условий окружающей среды и напряжения питания симисторного преобразователя.
Принципиальная
схема:
3

Т












1




4


ПК


2
-
Модуль программируемого контроллера и регулятора температуры.
-
Нагревательный элемент.
-
Датчики температуры.
-
Воздушная ёмкость.
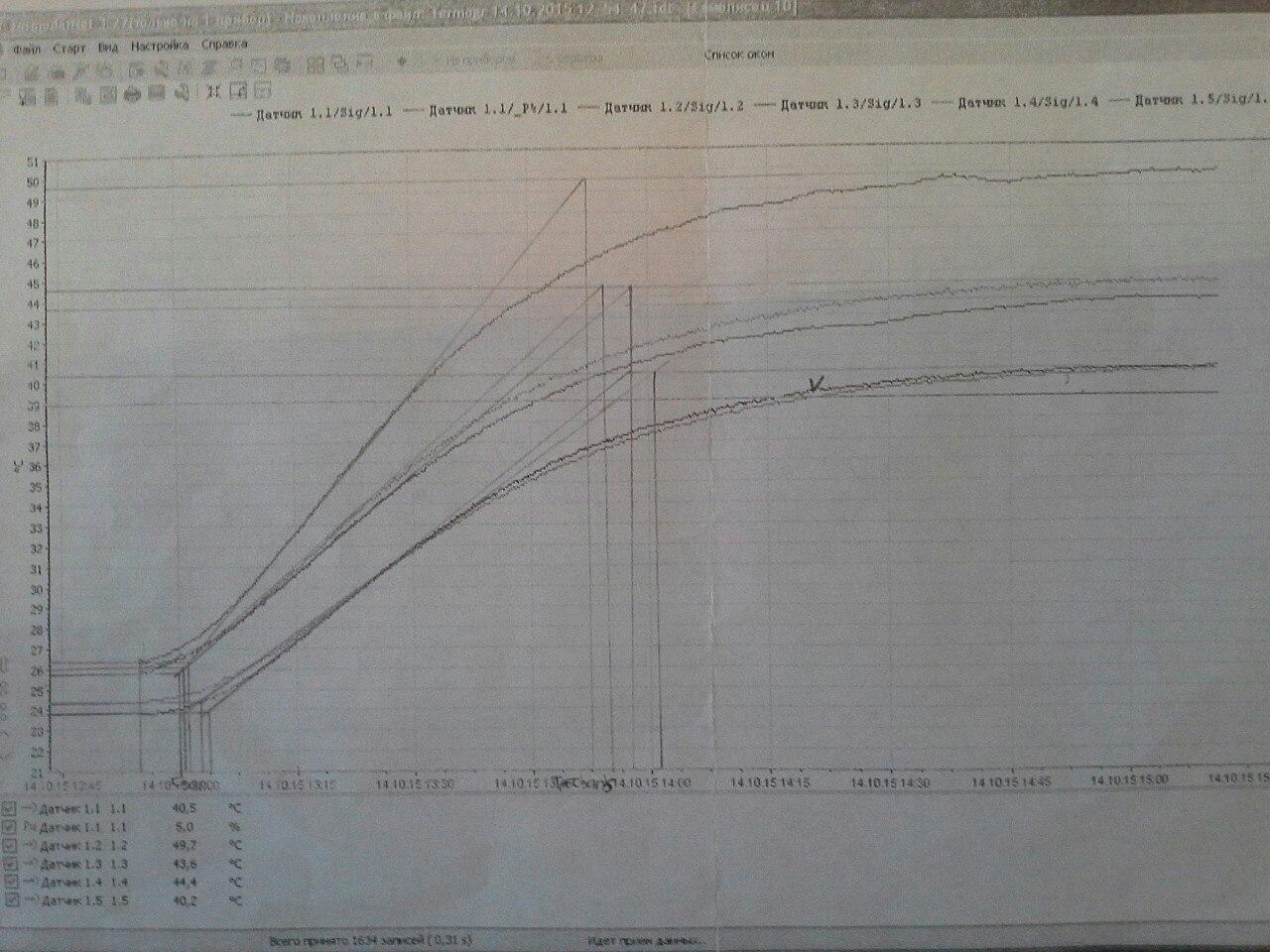
Переходная характеристика объекта.
-
Поверка датчиков:
(3’) τзап1 = 540 с Т01 = 3320 τзап1/ Т01 = 0.162
(4’) τзап2 = 495 с Т02 = 3600 τзап2/ Т02 = 0.138
(5’) τзап3 = 315 с Т03 = 3555 τзап3/ Т03 = 0.089
(6’) τзап4 = 360 с Т04 = 3330 τзап4/ Т04 = 0.108
(7’) τзап5 = 405 с Т05 = 3150 τзап5/ Т05 = 0.128
У 3-го (5’) датчика τзап3/ Т03 имеет наименьшее значение. Можно предположить, что он является образцовым.
Поверяемая погрешность ԑ (относительно 3-го (образцового) датчика):
ԑ31 = -4.65 °C
ԑ32 = -3.30 °C
ԑ33 = 0.85 °C
ԑ34 = 5.85 °C
Поверяемая погрешность ԑ (относительно соединённого с каналом регулирования 1-го датчика):
ԑ11 = 1.35 °C
ԑ12 = 4.05 °C
ԑ13 = 5.50 °C
ԑ14 = 10.50 °C
Поверяемая погрешность датчиков относительно образцового датчика меньше, чем поверяемая погрешность относительно соединённого с каналом регулирования датчика.
-
Приближённая передаточная функция объекта регулирования.
W(s) = (16.55 * e-9s)/(55s + 1) (T0 и τзап выражены в минутах)
-
Расчёт параметров настройки ПИД-регулятора:
K = (ΔT/Δτ)/ΔN = ((40.2 – 23.8)/3009.4)/5 = 1.0110*10-3
ΔT [°C] τзап = τм = 392 с
Δτ [сек]
ΔN [%]
Kp = 83* τм*K = 32.86 °C
Ki = 2* τм = 784 c
Kd = 0.25* τм = 98 c
Расчёт критериев качества регулирования по переходной характеристике CP в динамическом режиме.
-
Критерии, характеризующие точность системы регулирования:
-
ԑmax= 71 – 23.5 = 47.5 °C – максимальная погрешность.
-
ԑ∞= 50 – 23.5 = 26.5 °C – статическая погрешность.
-
Критерии быстродействия системы регулирования:
2.1 τп.п. = 231.2 мин = 3.85 ч - время переходного процесса
2.2 τmax = 21.2 мин - время достижения 1-го максимума.
-
Критерии колебательности переходного процесса :
-
ψ= ((А1 – А3)/A1)*100% = ((21 – 4)/21)*100% = 80.6% - степень затухания колебаний.
ψ›0 – колебания затухают, система устойчива
-
σ=(A2/A1)*100% = (25/21)*100% = 11.9% - переригулирование
σ=(( ԑmax - ԑ∞)/ ԑ∞)*100% = ((47.5 – 26.5)/26.5)* 100% = 79.2%
-
δ = lg(A1/A3) = lg(21/4) = 0.72 – логарифмический декремент затухания
В данном процессе время регулирования очень велико, также наблюдается значительное перерегулирование.
Влияние параметров настроек регулятора на показатели качества регулирования.
-
Данный переходный процесс практически равносилен типовому оптимальному процессу, где τп.п. и σ велики и обеспечивается наименьшая ԑmax. В этом случае, чтобы уменьшить ԑmax, нужно уменьшить интегральную составляющую – коэффициент Кi.
-
Но τп.п. достаточно велико, чтобы увеличить быстродействие процесса (уменьшить τп.п.), нужно увеличить Kp и Kd , но до допустимых значений, чтобы система осталась устойчивой.
Выводы:
Параметры ПИД-регулятора следует скорректировать, т.к. данная настройка не обеспечивает приемлемое качество регулирования. Можно использовать метод незатухающих колебаний для оптимальной настройки регулятора: для ПИД Kp = 0.6*Kp max
Tu = Tкр/2
Tп = Tкр/8,
но для этого следует провести ряд опытов, чтобы подобрать Kp max и определить Tкр.
В статическом режиме.
В динамическом режиме.
