

Элементы систем автоматики
Системы автоматики и телемеханики состоят из отдельных элементов связанных между собой. Задачей каждого элемента автоматики является качественное или количественное преобразование сигнала поступающего от предыдущего звена и передача его последующему звену.
Элементы можно рассматривать как преобразователь энергии.
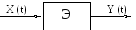
Элементы автоматики, в которых энергия выходной величины Y(t) обеспечивается за счёт энергии входной величины, называется пассивными. В таких элементах невозможно усиление выходной величиныY(t) <X(t) за счёт внутренних потерь в самом элементе.
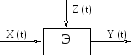
Элементы автоматики, в которых имеется дополнительный источник энергии Z(t), а входной сигналX(t) только управляет передачей энергии от этого источника на выход, называется активными элементами автоматики.
Кроме АЭА и ПЭА, элементы автоматики подразделяют на генераторные и параметрические. В генераторных элементах автоматики происходит непосредственное преобразование одной формы энергии в другую.
В параметрических элементах автоматики энергия входной величины преобразуется в один из параметров.
Элементы автоматики, как и системы автоматики, могут быть замкнутыми и разомкнутыми. Элементы автоматики, в которых осуществляется частичная передача энергии с выхода на вход, называются замкнутыми.
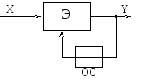
Обратная связь может быть отрицательной и положительной: X±XОС.
Если X+XОС, то ОС положительна;
X–XОС, то ОС отрицательна.
Различают местную, гибкую и запаздывающую обратные связи.
ЭА бывают также реверсивные и нереверсивные. В РЭА знак выходной величины изменяется при изменении знака входной величины. В нереверсивных ЭА выходная величина сохраняется независимо от знака входной величины.
Характеристики элементов автоматики.
Элементы автоматики могут работать в двух режимах: установившемся и динамическом. В первом случае входите и выходите величины не изменяются во времени. Динамический режим предполагает работу ЭА при меняющийся входной и выходной величинах.
Наиболее полно действие ЭА (процессов протекающих в них) в общем виде описывается дифференциальным уравнениями.
F(x,x’,x’’,…xn;y,y’,y’’…ym;t ) =y(f,f’ ,f’’,…fk,t)
x,y– входные и выходные величины
t– время
f– возмущающее воздействие и факторы.
при f=0
F(x,x’,x’’,…xn;y,y’,y’’…ym;t) = 0
для установившегося режима
t= ∞
y’ =y’’ =ym= 0
x’ = x’’ = xn = 0
Статическая характеристика управления
F(x,y) = 0
y = f(x)
Статическая характеристика управления может быть линейной и нелинейной
для линейных элементов:
y=ax+b
Для линейных ЭА характерен принцип суперпозиции. Он заключается в том, что выходные сигналы при любой комбинации входных воздействий равны сумме выходных сигналов при любом из воздействий, подаваемых на вход отдельно.
Для нелинейных характеристик принцип суперпозиции не выполняется.
Y


X
В диапазоне изменения xнм -xнбвеличиныy, изменяется линейно – линейный диапазон управления.
Y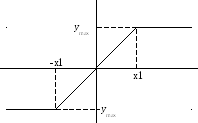

X
│x│ >x1 – режим насыщения
│x│ <=x1– линейная характеристика
Л
Y

X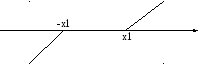
│x│ >x1 – режим насыщения
Наименьшее значение входной величины x1, при котором имеется изменение выходной величины называется порогом чувствительности.
Р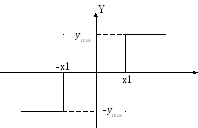 елейная
характеристика управления.
елейная
характеристика управления.
│
X
Некоторые элементы автоматики имеют релейную характеристику управления с неоднозначностью.
Н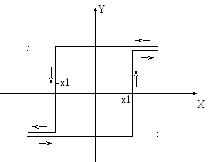 еоднозначность
зависит от направления изменения
параметра.
еоднозначность
зависит от направления изменения
параметра.
2.Основные параметры элементов.
ЭА в установившихся режимах характеризуются рядом параметров, часть которых может быть определена непосредственно по характеристике управления, как основной характеристике ЭА в статическом режиме. Для ЭА с непрерывной характеристикой управления такими параметрами являются:
коэффициент преобразования;
предельные значения входной и выходной величин и т. д.
 Y
Y
![]() - коэффициент преобразования
- коэффициент преобразования
![]()
![]()
X
Характеристика управления ограничивается maxиminзначениями входной и выходной величин при существующей мощности.
xmin xmax
ymin ymax
Px min Px max
Py minPy max
![]() - коэффициент передачи мощности
- коэффициент передачи мощности
ЭА характеризуются погрешностью передачи. В общем виде выходные величины ЭА могут быть функцией следующих величин: температуры, давления, влажности, колебаний напряжения, вибраций.
y = f(x, Θ, p, Zв, U, F, a...)
![]()
![]() - коэффициент преобразования по основному
параметру;
- коэффициент преобразования по основному
параметру;
![]() ...
– парциальные коэффициенты преобразования
...
– парциальные коэффициенты преобразования
![]()
К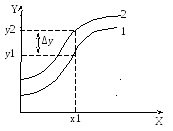 ак
видно, чем меньше парциальные коэффициенты,
тем меньше погрешность вызываемая
парциальными воздействиями.
ак
видно, чем меньше парциальные коэффициенты,
тем меньше погрешность вызываемая
парциальными воздействиями.
1 – расчётная характеристика
2 – фактическая характеристика
![]()
![]() - относительная погрешность
- относительная погрешность
Погрешности бывают систематическими и случайными. Систематические погрешности – закономерно возникают в силу заранее известных факторов.
Для элементов с линейной характеристикой управления основными параметрами являются:
коэффициент срабатывания;
коэффициент отпускания;
коэффициент возврата;
коэффициент запаса и др.
Динамические свойства элементов
Зависимость выходной величины от времени при изменении входной величины, называют динамической характеристикой управления. Динамическая характеристика управления y(t), называется переходной характеристикой элемента. Они определяются:
физическими свойствами элемента
законами изменения входной величины.
Поведение ЭА в динамическом режиме характеризуют по реакции на типовую (стандартную) входную функцию.
единичная функция
импульсная функция
гармонический сигнал.
Большинство элементов автоматики при действии на входе единичного сигнала имеют экспоненциальный закон изменения выходной величины.
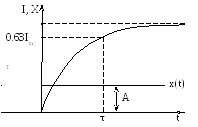
t<0, x(t) = 0, x>0,x(t) = A
Время, в течении которого выходное значение достигает 0.63Iустанов., называют постоянной времени.