

1 / Алгебра и геометрия / Методички / pdf / Геометрия / Geometry
.pdfСвойства смешанного произведения.
1) число |a br c | равно объему параллелепипеда, построенного на
некомпланарных векторах a ,b ,c , приведенных к общему началу. В этом состоит геометрический смысл смешанного произведения.
2) (необходимое и достаточное условие компланарности трех векторов). Три вектора компланарны тогда и только тогда, когда их
смешанное произведение равно нулю. 3) (arr×b )rcr=ar(b ×crr)
4)a b c =b c a =c a b .
Линейная зависимость векторов.
Пусть дана система векторов
a1,a2 ,...,an |
(1) |
и α1, α2,...αn - действительные числа. Тогда векторы вида
α1a1 +α2a2 +... +αnan
называются линeйнoй комбинaциeй вeктоpов cиcтeмы (1).
Определение. Система векторов (1) называется линейно зависимой, если существует такая линейная комбинация этих векторов, равная нулевому вектору, т.е.
α1a1 +α2a2 +... +αnan =0 |
(2) |
и хотя бы одно из чисел αi ≠ 0 .
Определение. Система (1) называется линейно независимой, если равенство (2) возможно тогда и только тогда, когда все числа αi=0.
Определение. Если какой-либо вектор a можно представить в
виде линейной комбинации векторов системы (1), т.е.
ar=α1a1 +α2a2 +... +αnan ,
то говорят, что вектор a линейно выражается через векторы системы (1).
Теорема. Для того чтобы векторы системы (1) были линейно зависимы (n>1), необходимо и достаточно, чтобы по крайней мере один из них линейно выражался через остальные.
11
Следствие. Если векторы системы (1) линейно независимы, то ни один из них нельзя линейно выразить через остальные. В частности, ни один из них не может быть нулевым.
Теорема. Для того чтобы два вектора были линейно зависимы, необходимо и достаточно, чтобы они были коллинеарны.
Следствие. Два вектора линейно независимы тогда и только тогда, когда они неколлинеарны.
Теорема. Любой вектор a на плоскости можно разложить по любым двум неколлинеарным векторам e1 и e2 этой плоскости, т.е.
представить в виде:
a =α1e1 +α2e2
причем это разложение единственно.
Теорема. Для того чтобы три вектора были линейно зависимы, необходимо и достаточно, чтобы они были компланарны.
Следствие. Три вектора линейно независимо тогда и только тогда, когда они некомпланарны.
Теорема. Любой вектор a можно разложить по трем некомпланарны векторам e1 ,e2 и e3 , т.е. представить в виде:
a =α1e1 +α2e2 +α3e3
причем это разложение единственно.
Tеорема. Любые четыре вектора линейно зависимы.
Определение. Говорят, что два лежащих в плоскости α линейно независимых вектора a и b (любые три линейно независимых
вектора ar,b и cr) образуют на этой плоскости (в пространстве) базис, если любой вектор, лежащий в этой плоскости α (любой вектор
пространства), может быть представлен в виде линейной комбинации векторов ar и b (ar,b ,cr).
Итак:
1)любая пара лежащих в данной плоскости неколлинеарнах векторов образует базис на этой плоскости;
2)любая тройка некомпланарных векторов образует базис в пространстве.
12

Координаты на прямой.
Прямая l, на которой задана точка 0, называемая началом координат, задан единичный вектор e , называемый ортом,
называется координатной осью.
Пусть М - произвольная точка прямой. Тогда вектор OM кол-
линеарен вектору er и, значит, OM = xer. Вектор OM называется
радиус-вектором точки М, а число х называется координатой точки
М на координатной оси l (обозначается: М(х)) или координатой
радиус-вектора OM (обозначается: OM =(х)).
Так как er - единичный вектор, то каждой точке М на оси l поставлено в соответствие вполне определенное действительное число – ее координата.
Обратно, для каждого действительного числа х найдется единственная точка М оси l, координата которой равна х. Таким образом, положение любой точки координатной оси однозначно определяется заданием координаты этой точки.
Координаты на плоскости.
Пусть на плоскости α заданы две координатные оси ОХ и OY с неколлинеарными ортами e1 и e2 cоответственно. Тогда тройка
(О,e1 ,e2 ) называется афинным репером, или афинной системой
координат плоскости α.
Точка 0 называется началом кооpдинат, векторы e1 и e2 —
базисными векторами. Если М – произвольная точка на плоскости α, то
OM = OM1 +OM 2 = xer1 + yer2
Числа х и у называются афинными координатами точки М в системе (0,e1 ,e2 ), причем х называется абсциссой, а у – ординатой
(записывается: М(х,у)). Вектор OM называется радиус-вектором точки М, числа х, у - координатами вектора OM (записывается:OM =(х,у)).
Афинная система координат (0,e1 ,e2 ) обозначается также OXY. Ось ОХ называется осью абсцисс, ось OY - осью ординат.
13

Теорема. Пусть a =α1a1 +α2a2 +... +αnan , где αi R
x =α x |
+α |
2 |
x |
2 |
+... +αyx=α y +α |
2 |
y |
2 |
+... +α |
n |
y |
n |
||
1 1 |
|
|
n n |
1 1 |
|
|
|
|
||||||
|
|
ai |
= (xi , yi ), i =1,...n, |
a = (x, y). |
|
|
|
|||||||
Тогда
Следствие 1. Пусть даны точки А (х1,y1) и В (х2,у2). Тогда
AB = (x2 − x1, y2 − y1 )
Следствие 2. Два вектора a = (х1,у1) и b = (х2,у1) коллинеарны тогда и только тогда, когда их соответствующие координаты пропорциональны, то есть
x 2 |
= |
y 2 |
. |
x1 |
|
||
|
y 1 |
||
Афинная система координат (0,e1 ,e2 ), в которой орты e1 и e2
взаимно ортогональны, называется декартовой, или прямоугольной системой координат. В этом случае орты e1 и e2 обозначаются
соответственно ir и rj .
Координаты в пространстве.
Определение. Пусть в пространстве заданы три координатные оси OX, OY и OZ с некомпланарными ортами e1 ,e2 ,e3 соответственно.
Тогда четверка (0, e1 ,e2 ,e3 ) называется афинным репером, или
афинной системой координат в пространстве.
Точка 0 - начало координат, векторы e1 ,e2 ,e3 - базисные
векторы.
Так как векторы e1 ,e2 ,e3 - линейно независимы, то для
любого вектора ar = OM имеет место разложение: ar = OM = xe1 +ye2 +ze3
Числа x, y, z называются координатами точки М (записывается: М (х,у,z)), OM называется радиус-вектором точки М с координатами
х, у, z (записывается: OM = (х,у,z)), причем х называется абсциссой, у -
ординатой, z - аппликатой.
Афинную систему часто обозначают через OXYZ. Оси OX, OY, OZ называют соответственно осями абсцисс, ординат и аппликат. Плоскости, определяемые координатными осями, т.е. OXY, OYZ,
14

OXZ, называют координатными плоскостями. Эти плоскости делят все пространство на восемь частей, называемых координатными октантами.
Если упорядоченная тройка векторов e1 , e2 , e3 является
правой, то афинную систему называют правой, в противном случае - левой. В дальнейшем под афинной системой будем понимать правую систему. Если базисные векторы e1 , e2 , e3 попарно взаимно
ортогональны, то афинная система координат называется декартовой (прямоугольной), а базисные векторы обозначается соответственно
i , j,k .
В частности, если даны точки А (х1,у1,z1), В (х2,у2,z2), то
AB = (x2 − x1, y2 − y1, z2 − z1 )
Векторы a = (х1,у1,z1) и b = (х2,у2,z2) коллинеарны тогда и только тогда, когда их соответствующие координаты пропорциональны, т.е.
x2 |
= |
y2 |
= |
z2 |
|
x |
y |
z |
|||
|
|
||||
1 |
1 |
1 |
|||
Скалярное произведение векторов в координатной форме.
Пусть в прямоугольной системе координат заданы векторы: ar= (х1,у1,z1), b = (х2,у2,z2). Тогда
a ·b = x1x2+y1y2+z1z2.
В частности
| ar|=  ar2 =
ar2 =  x12 + y12 + z12
x12 + y12 + z12
Если даны точки А(х1,у1,z1) и В(х2,у2,z2), то, как известно, AB =(x2- х1,y2-у1,z2-z1) и значит.
| AB |=  (x2 − x1 )2 +( y2 − y1 )2 +(z2 − z1 )2
(x2 − x1 )2 +( y2 − y1 )2 +(z2 − z1 )2
-формула расстояния между двумя точками.
r |
|
r |
arb |
|
|
|
|
|
|
|
|
|
|
|
Так как cos(a ^b) = |
r |
r |
, то |
|
|
|
|
|
|
|
|
|
||
|
' |
| a || b | |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
r |
|
|
x x |
|
+ y y |
|
+ z z |
|
|
||
|
|
cos(a ^b) = |
|
1 |
|
2 |
1 |
2 |
|
1 |
2 |
|
||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
, |
|
2 |
|
2 |
2 |
|
2 |
|
2 |
2 |
|
|
|
|
|
|
x1 |
+ y1 |
+ z1 |
x2 |
+ y2 |
+ z2 |
||||
15
и ar b тогда и только тогда, когда выполняется равенство:
х1x2 + y1y2 + z1z2 = 0.
Определители второго и третьего порядков
Определение. Таблица, составленная из чисел, записанных в следующем виде:
a |
a |
... |
a |
|
11 |
12 |
|
1n |
|
a21 |
a22 |
... |
a2n |
|
A = |
|
... |
... |
|
... ... |
|
|||
|
an2 |
... |
|
|
an1 |
ann |
|||
называется квадратной матрицей n-го порядка или просто матрицей n-го порядка. Первый индекс i элемента аij матрицы А указывает на номер строки, а второй индекс j - на номер столбца, на пересечении которых стоит элемент аij.
Пусть дана квадратная матрица А второго порядка:
a |
a |
|
A = 11 |
12 |
|
|
|
|
a21 |
a22 |
|
Определителем (детерминантом) матрицы А второго порядка
называется число ∆ равное:
∆ = |
|
a11 |
a12 |
|
= a a |
22 |
−a a |
21 |
|
|
|||||||
|
|
a21 |
a22 |
|
11 |
12 |
||
|
|
|
|
|
|
|
Для матрицы А третьего порядка, где
a |
a |
11 |
12 |
A = a21 |
a22 |
a |
a |
31 |
32 |
a13 a23 a33
16

ее определитель ∆ есть число, которое вычисляется следующим образом:
∆ = а11а22а33 + а12а23а31 + а13а21а32 – а13а22а31 – а11а23а32 – а12а21а33.
Чтобы запомнить, какие произведения в правой части равенства берутся со знаком "+", а какие со знаком "–", полезно использовать следующее правило треугольников:
Легко проверить, что
a11 |
a12 |
a13 |
|
a22 |
a23 |
|
a21 |
a23 |
|
a21 |
a22 |
|||
|
|
|
||||||||||||
|
|
|
||||||||||||
a |
|
a |
|
a |
|
=a |
−a |
+ a |
||||||
|
21 |
|
22 |
|
23 |
11 |
a |
a |
12 |
a |
a |
13 |
a |
a |
a31 |
a32 |
a33 |
|
32 |
33 |
|
31 |
33 |
|
31 |
32 |
|||
|
|
|
|
|
|
|
|
|
||||||
- разложение определителя по элементам первой строки.
Векторное произведение векторов в координатной форме.
Пусть в прямоугольной системе координат заданы векторы ar = (x1,y1,z1), b = (x2,у2,z2). Тогда
a ×br = |
|
y1 |
z1 |
|
ir − |
|
x1 |
z1 |
|
rj + |
|
x1 |
y1 |
|
kr |
|
|
|
|
|
|
||||||||||
|
|
y2 |
z2 |
|
|
|
x2 |
z2 |
|
|
|
x2 |
y2 |
|
|
Последнее равенство можно записать так:
r |
r |
= |
i |
j |
k |
a |
×b |
x |
y |
z |
|
|
|
|
1 |
1 |
1 |
|
|
|
x2 |
y2 |
z2 |
|
|
|
|
|
|
Итак,
17

r |
r |
|
|
y |
z |
|
,− |
|
x |
z |
|
, |
|
x |
y |
|
|
|
|
|
|
|
|
||||||||||||
a |
×b |
= |
|
1 |
1 |
|
|
1 |
1 |
|
|
1 |
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
y2 |
z2 |
|
|
|
x2 |
z2 |
|
|
|
x2 |
y2 |
|
|
Тогда
r |
r |
y |
z 2 |
+ |
x |
z 2 |
+ |
x |
y 2 |
| a |
×b |= |
1 |
1 |
1 |
1 |
1 |
1 |
||
|
|
y2 |
z2 |
|
x2 |
z2 |
|
x2 |
y2 |
Смешанное произведение векторов в координатной форме.
Пусть в прямоугольнойr системе координат заданы векторы a = (х1,у1,z1), b = (x2,y2,z2) и c = (x3,y3,z3). Тогда
x1 y1 z1 arbcr = x2 y2 z2
x3 y3 z3
Отсюда следует, что векторы a ,b и c компланарны тогда и только тогда, когда выполняется равенство:
x1 y1 z1
x2 y2 z2 =0 x3 y3 z3
Полярные координаты.
Возьмем на плоскости произвольную точку 0, которую назовем полюсом, и ось ОР, задаваемую единичным вектором e , которую назовем полярной осью. Тогда положение произвольной точки М плоскости можно определить двумя числами: r -
длина отрезка ОМ и φ - угол, который образует отрезок ОМ с осью ОР в положительном направлении, т.е. при движении против часовой стрелки.
18
Величины r и φ называются полярными координатами точки М, r-полярный радиус, φ-полярный угол. При этом считаем, что полярные координаты точек плоскости изменяются в следующих пределах: 0 ≤ r < ∞,0 ≤ϕ < 2π . Таким образом, получаем систему координат,
которая называется полярной системой координат.
С прямоугольными координатами полярные связаны следующими соотношениями:
х = r cosφ, у = r sinφ.
Так как х2 + у2 = r2, то
r = x2 + y2 ; cosϕ = |
x |
; sinϕ = |
y |
x2 |
+ y2 |
|
x2 + y2 |
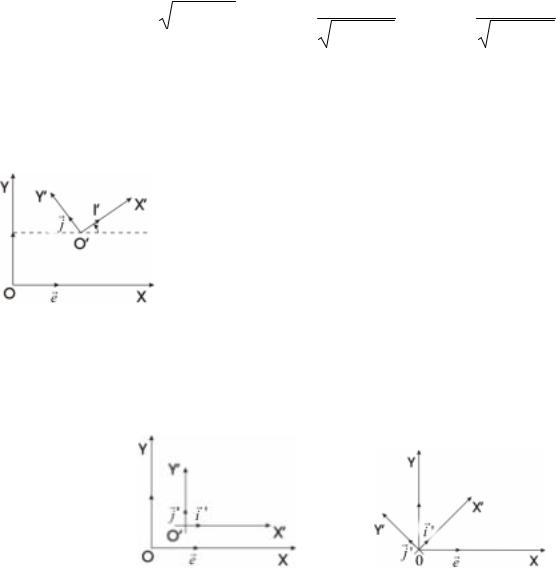
Прямоугольные координаты на плоскости.
Пусть дана старая и новая прямоугольные системы координат, соответственно (0,i , j ) и (О',ir', rj '). Обозначив через φ угол между векторами
iи i '. Тогда
x= x'cosφ - y'sinφ + α,
y = x'sinφ + y'cosφ + β
В частности, если ir=ir' и j = j ', то формулы принимают вид
x = х' + α, у = у' + β
- формулу преобразования координат при параллельном переносе системы координат
Если же точки 0 и 0' совпадают, то
19

x = x'cosφ - y'sinφ,
y= x'sinφ + y'cosφ.
-формулы преобразования координат при повороте системы координат вокруг начала на угол φ
ПРЯМАЯ НА ПЛОСКОСТИ.
Прямая на плоскости
Пусть в плоскости α задана афинная система координат (0,e1 ,e2 ) и прямая l, принадлежащая этой
плоскости α. Составим уравнение прямой l. Заметим, что положение прямой l однозначно определено, если известен вектор, коллинеарный этой прямой и
называемый направляющим вектором прямой, и точка, через которую прямая проходит. Очевидно, что в качестве направляющего вектора прямой можно взять любой вектор, коллинеарный данной прямой. Пусть r1 = (m1,n1) и r2 =(m2,n2) - какие-либо направляющие векторы
прямой l. Тогда из необходимого и достаточного условия коллинеарности двух векторов
следует, что |
m1 |
= |
n1 |
. Если прямая l не параллельна оси OY, то |
|||||
n |
|||||||||
|
m |
|
|
|
|
|
|
||
|
2 |
2 |
|
|
|
|
|
||
m1 ≠ 0,m2 ≠ 0, следовательно, |
|
|
|
||||||
|
|
|
|
|
n1 |
= |
n2 |
= k |
|
|
|
|
|
|
m |
m |
|||
|
|
|
|
|
|
|
|||
|
|
|
|
1 |
2 |
|
|||
- угловой коэффициент относительно выбранной системы координат. r r
В частности, для прямоугольной системы координат (0,i , j )
k = tgα, где α – угол между осью ОХ и любым направляющим вектором прямой l. Угол α называется углом наклона прямой l к оси ОХ.
20