

Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
БАЛЛИСТИЧЕСКИЕ УСЛОВИЯ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ |
83 |
|
|
более общий функционал, учитывающий штрафные члены, меняя состав и число корректируемых параметров на промах. Практические алгоритмы и методы описаны в Φ3Γ. Следует отметить, что указанные ме тоды позволили создать надежные алгорит мы решения задач сближения в точной по становке и более тридцати лет используют ся на практике для проектирования и управления полетом при сближении рос сийских и советских космических кораблей «Союз» и «Прогресс» с орбитальными стан циями «Мир» и МКС.
Методы оптимизации траекторий сбли жения КА в окрестности круговых орбит с использованием многорежимных двигатель ных установок, в том числе с малой тягой, и наличием краевых условий во внутренних
точках и ограничений |
времени работы ДУ |
на отдельных участка |
траектории представ |
лены в [4], где используются алгоритмы внутренней точки задач линейного про граммирования высокой размерности (десят ки сотни тысяч переменных). Основу мето дов составляют дискретизация траектории на малые сегменты, в которых допускается про ведение маневров, и введение для всех сег ментов множеств псевдоимпульсов, опреде ляющих возможные направления вектора тя ги КА. Терминальные условия представля ются в форме линейного матричного уравне ния. Матричное неравенство для сумм ха рактеристических скоростей псевдоимпуль сов на каждом сегменте используется для преобразования к форме линейного про граммирования.
СПИСОК ЛИТЕРАТУРЫ
1.Аппазов Р.Ф., Сытин О.Г. Методы про ектирования траекторий носителей и спутни ков Земли. М.: Наука, 1987. 440 с.
2.Лидов М.Л. Математическая аналогия между некоторыми оптимальными задачами коррекции траекторий и выбора состава изме рений и алгоритмы их решения // Космиче ские исследования. 1971. Т.8, № 5. С. 687.
3.Навигационное обеспечение полета ор битального комплекса «Салют 6»–«Союз»– «Прогресс» / Под ред. Б.Н. Петрова и И.К. Ба жинова М.: Наука, 1985. 376 с.
4.Улыбышев Ю.П. Оптимизация много режимных траекторий сближения с ограниче ниями // Космические исследования. 2008.
Т.46. № 2. С. 135–147.
2.2.4. БАЛЛИСТИЧЕСКИЕ УСЛОВИЯ ПОЛЕТА КА
Видимость КА с Земли и из космоса. Для КА, наблюдающего поверхность Земли, поле обзора представляет сферический сегмент на поверхности Земли с геоцентрическим углом Η, зависящим от высоты орбиты и минималь ного угла возвышения [1]. Данные парамет ры связаны соотношением:
cos(Η ) |
|
cos |
|
, |
(2.2.80) |
|
|
|
1 |
h |
|
|
|
|
& |
|
) |
|
||
|
|
|
||||
|
& |
|
|
) |
|
|
|
% |
|
Re ( |
|
||
где Re — экваториальный радиус Земли. Геометрия видимости представлена на
рис. 2.2.5.
Условием видимости, например радиови димости для связи, КА для наблюдателя на по верхности Земли является его нахождение над плоскостью местного горизонта этого наблю дателя не ниже чем под некоторым минималь ным углом возвышения (см. рис. 2.2.5). Для радиотехнических систем этот угол составляет, как правило, не менее чем 3…7 .
Если размер поля обзора ограничивается максимально допустимым расстоянием 7max, то для Η соотношение примет вид:
|
(R h)2 |
R2 |
72 |
|
cos Η |
e |
e |
max |
. (2.2.81) |
2(Re h)Re |
|
|||
|
|
|
||
Времена начала и окончания зоны види |
||||
мости КА определяются по достижению пре дельных значений угла возвышения с исполь зованием геоцентрических координат наблю дателя Rн и радиус вектора КА r:
|
|
![(r R |
)т R ] |
|
|
|
7т R |
|||
|
|
arccos |
н |
н |
|
|
|
arccos |
н |
. |
|
2 |
# |
| r Rн || Rн | |
|
2 |
|
| 7 | Re |
|||
|
|
|
|
|
|
|
|
|
2.82) |
|
Рис. 2.2.5. Геометрия видимости, — геоцен трический угол обзора, h — высота полета КА над Землей

Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
84 |
Глава 2.2. ОРБИТАЛЬНОЕ ДВИЖЕНИЕ |
|
|
Рис. 2.2.6. Взаимная видимость двух КА
Угол полураствора конуса обзора со сто роны КА равен:
Ι Η . |
(2.2.83) |
2 |
|
ется над Землей (рис. 2.2.6). Для практических целей это условие обычно усиливается — ли ния визирования должна находиться над плот ными слоями атмосферы (hатм 4 100 км).
Данное условие можно представить в виде
| r1 | sin , Rз hатм , |
|
(2.2.85) |
|||||
где |
|
|
|
|
|
|
|
! |
r |
т |
(r2 |
r1) |
|
|
|
|
|
|
|||||
, arccos |
1 |
|
|
. |
(2.2.86) |
||
| r | | r |
r | |
||||||
|
|
|
|||||
# |
1 |
2 |
1 |
|
|||
Трассы полета КА. Трасса полета КА представляет собой траекторию подспутнико вой точки на поверхности Земли. Географиче ские координаты (широта и долгота) подспут никовой точки (без учета прецессии плоскости орбиты):
! |
arcsin(sini sinu); |
|
(2.2.87) |
# ву ;зt arctg (cosi sinu,cosu),
Площадь наблюдаемого сферического сегмента составит:
SΗ 2 (1 cosΗ). |
(2.2.84) |
Для круговых орбит размер поля обзора Η постоянен, а для эллиптических орбит изме няется в зависимости от высоты полета h.
Условие взаимной видимости двух КА — линия, соединяющая их положения располага
где i — наклонение орбиты, u — аргумент широ ты; ву — Гринвичская долгота восходящего уз ла; t — время от восходящего узла; ;з — угловая скорость вращения Земли. Здесь используется круговая функция arctg (…, …), где первый член соответствует синусу искомого угла, а второй — косинусу этого угла. Пример трассы полета МКС (круговая орбита с i 51,6 , h 400 км) приведен на рис. 2.2.7.
Рис. 2.2.7. Пример трассы полета МКС
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
БАЛЛИСТИЧЕСКИЕ УСЛОВИЯ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ |
85 |
|
|
Рис. 2.2.8. Примеры трасс КА на различных круговых орбитах
Трасса полета КА всегда находится в ог раниченном широтном слое i 5 5 i. За счет вращения Земли она смещается в вос точном направлении и за один виток (время между последовательным прохождением двух восходящих узлов) имеет сдвиг, не завися щий от формы орбиты (определяется только ее периодом Т ), который называется межвит ковым расстоянием:
ву ;зТ. |
(2.2.88) |
Скорость движения по трассе для кру говой орбиты (аргумент широты u ;t, где ; — угловая скорость орбитального движе ния):
|
; |
|
|
sini cosu |
; |
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|||||
1 sin2 i sin2 u |
|||||||||
|
|
|
|
||||||
|
|
|
|
|
|
cosi |
|
(2.2.89) |
|
; ; |
|
|
. |
||||||
|
|
з |
1 |
sin2 i sin2 u |
|||||
|
|
|
|
||||||
Особым случаем являются орбиты, имею щие нулевое наклонение i 0 и период, равный звездным суткам. В этом случае КА остается неподвижным относительно поверхности Зем ли. Такие КА называют геостационарными (см. п. 2.2.5).
Примеры трасс КА на различных круго вых орбитах показаны на рис. 2.2.8.
Геометрические свойства трасс на эл липтических орбитах в силу существенных
различий скорости полета КА относительно Земли носят более сложный характер, свя занный с монотонностью изменения долго ты, геодезической кривизной и характером точек самопересечения. Примеры эллипти ческих орбит с периодами T 6; 18 ч, иллю стрирующих влияние эксцентриситета ор биты на трассы КА при неизмененных ос тальных параметрах орбит, представлены на рис. 2.2.9.
Освещенность КА и Земли. Важное зна чение при анализе полета КА имеют условия его освещенности Солнцем, которые влияют на нагрев КА, оптическую аппаратуру звезд ных датчиков, эффективность работы сол нечных батарей и т.д. Характер освещенно сти зависит от взаимного положения самого КА, Солнца, Земли, а в некоторых случаях и Луны.
Геометрия образования теневых участков от Земли показана на рис. 2.2.10. С учетом гео метрических размеров Солнца и Земли разли чают собственно теневые и полутеневые участ ки. В последнем случае солнечный диск час тично закрыт Землей (рис. 2.2.11).
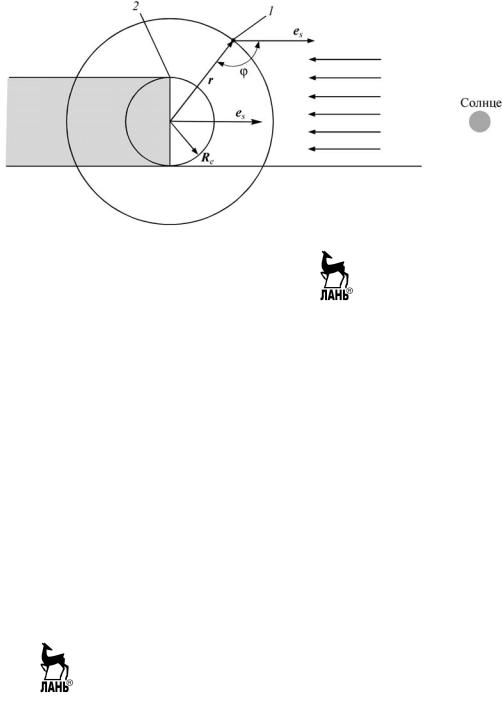
Полутеневые интервалы для низковысот ных и средневысотных орбит КА обычно су щественно меньше длительности самого тене вого участка, поэтому для расчетов теневых интервалов используют более простую геомет рическую интерпретацию в теневого ци линдра. Упрощенное представление тени на орбите иллюстрирует рис. 2.
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
86 |
Глава 2.2. ОРБИТАЛЬНОЕ ДВИЖЕНИЕ |
|
|
Рис. 2.2.9. Примеры трасс эллиптических орбит
Рис. 2.2.10. Геометрия образования теневых участков от Земли:
Rз — радиус Земли; Rc — радиус Солнца; rc — радиус вектор Солнца; ro — радиус вектор КА; aт — граничный угол области тени; aПT — граничный угол области полутени
Условие нахождения КА в тени можно представить в виде:
|
|
|
|
; |
|
|
r2 (rт e |
s |
)2 R |
(2.2.90) |
|
|
|
e |
|
||
, 5 / 2, |
|
|
|
|
|
где es — единичный вектор направления на Солнце.
Угол , (рис. 2.2.12) называют углом «Солнце – Объект – Земля». Он также опреде ляет освещенность подспутниковой точки, и
Рис. 2.2.11. Видимый солнечный диск:
а — полная освещенность; б — полутень; в — тень
при ϑΚ сответствует линии смены дня и ночи на поверхности Земли, называемой ли нией терминатора.
Плоскость орбиты КА прецессирует в инерциальном пространстве с некоторой угло вой скоростью , а видимое положение Солн ца описывается сложным движением с перио дом один год, поэтому продолжительность те невых интервалов и их положение на орбите меняются по времени полета КА. В зависимо сти от параметров самой орбиты и положения Солнца теневые участки в какие то периоды времени могут отсутствовать и в исключитель ном случае отсутствовать всегда. Последнее возможно, если скорость прецессии орбиты очень близка к угловой скорости смещения Солнца по экватору относительно инерциаль ного пространства. Этот случай соответствует солнечно синхронным орбитам (см. п. 2.2.5).
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
БАЛЛИСТИЧЕСКИЕ УСЛОВИЯ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ |
87 |
|
|
Рис. 2.2.12. Упрощенное представление тени на орбите:
1 — КА; 2 — линия терминатора
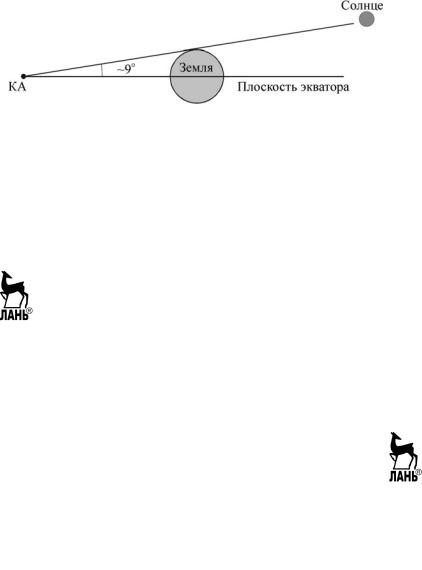
Для орбиты МКС (наклонение i 51,6 , высота h 4 400 км) скорость прецессии узла− 5,0 ϑсут, а средняя угловая скорость дви жения Солнца в годичном движении s0,98 ϑсут. Таким образом, угол между ли нией узлов орбиты КА и проекцией направле ния Солнца на экватор ежесуточно изменяется на s − 6 . Это означает, что условия ос вещенности орбиты МКС меняются с перио дичностью 460 суток. Пример распределения времен начала и окончания теневых интерва лов по шкале относительного времени от мо ментов прохождения восходящего узла для ор биты МКС в 2005 г. показан на рис. 2.2.13.
Угловое положение Солнца над плоско стью земного экватора также оказывает влия ние на теневые интервалы. Особенно это ярко
Рис. 2.2.13. Теневые интервалы для орбиты МКС в 2005 г.
выражено |
случае геостационарных орбит. |
Дважды в |
окрестности дат весеннего (422 |
марта) и осеннего (422 сентября) равноденст вий Солнце находится близко к плоскости земного экватора. Поэтому все геостационар ные КА будут ежедневно иметь теневые интер валы до тех пор, пока угол возвышения s Солнца над земным экватором не превысит по абсолютной величине 49 . Это соответствует датам, отстоящим от дат весеннего и осеннего равноденствия на /22…23 дня. Затенение гео стационарного КА показано на рис. 2.2.14. Ас трономическое время суток для интервала за тенения геостационарного КА зависит от его долготы, а характер изменения длительности тени — от дат и подобен для всех геостацио нарных КА (рис. 2.2.15) с максимальной дли тельностью тени 41h20m.
В ряде случаев необходимо также учиты вать возможность затенения КА Луной. Гео метрия образования лунной тени показана на рис. 2.2.16.
Вероятность таких событий для орбит с большими наклонениями мала. Для геоста ционарных орбит образование теневых интер валов носит относительно регулярный харак тер и случается несколько раз в год, причем собственно теневые интервалы могут отсутст вовать, а преимущественно имеются полутене вые интервалы. Их продолжительность может достигать до 43…4 ч.
Географические вычисления при анализе и визуализации полета КА. Вычисления, опре деляющиеся географическим представлени
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
88 |
Глава 2.2. ОРБИТАЛЬНОЕ ДВИЖЕНИЕ |
|
|
Рис. 2.2.14. Затенение геостационарного КА
Рис. 2.2.15. Длительность интервалов для геостационарного КА
Рис. 2.2.16. Геометрия образования лунной тени
ем различных баллистических условий (для анализа и/или визуализации полета КА), связаны с определением геоцентрических широты и долготы точки на поверхности сферической Земли, отстоящей от некоторой заданной точки А (долгота А и широта А) на заданное геоцентрическое расстояние в направлении, определяемом азимутом . Взаимное положение двух точек на поверх ности Земли иллюстрируется на рис. 2.2.17.
Соответствующие соотношения имеют вид:
! |
|
arcsin (sin |
|
cos cos |
|
sin cos ); |
|
||||||
|
|
B |
|
|
|
A |
|
|
A |
sin |
sin |
|
|
|
|
|
|
|
|
|
cos |
A |
|||||
|
|
B |
|
A |
+ arctg & sin sin , |
|
|
B |
|
). |
|||
|
|
|
|
|
|||||||||
|
|
& |
|
|
|
|
cos A |
|
|
) |
|||
# |
|
|
|
|
% |
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
(2.2.91) |
||
Здесь используется круговая функция arctg (…, …), где первый член соответствует синусу иско мого угла, а второй — его косинусу.
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
БАЛЛИСТИЧЕСКИЕ УСЛОВИЯ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ |
89 |
|
|
Рис. 2.2.17. Взаимное положение двух точек на поверхности Земли
Для обратного преобразования — опреде ления геоцентрического расстояния между дву мя заданными точками и азимута соединяющей их линии большого круга (в точке А) использу ются соотношения:
Η arccos[sin A sin B |
|
|
|
||||
|
|
|
|
|
|
|
|
cos A cos B cos( B A )]; |
|
||||||
|
|
|
|
|
|
|
(2.2.92) |
arctg & sin ( B A ) |
|
|
|||||
|
% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos |
sin |
A |
cos |
|
||
cos , |
B |
|
|
). |
|
|
|
|
|
|
|
|
|||
B |
|
cos A |
|
|
) |
|
|
|
|
|
|
( |
|
|
|
Здесь используется круговая функция arctg (…, …), где первый член соответствует синусу иско мого угла, а второй — его косинусу.
Для построения поля обзора наземным измерительным пунктом на поверхности Земли для КА на круговой орбите использу ется следующий алгоритм. По высоте орби ты h КА определяется геоцентрический угол сферического сегмента Η (2.2.80). Задавая значения азимута в диапазоне от 0 до 2 используя уравнения (2.2.91) рассчитывается множество граничных точек. На рис. 2.2.18 показаны примеры полей обзоров наземных пунктов, используемых для управления по летом КА «Союз» (Москва, Уссу рийск, Колпашев, Петропавловск Камчат
ский) и трасса его полета на |
х восьми |
витках. |
|
Для цилиндрической модели затенения Земли мгновенное положение линии терми натора (рис. 2.2.19) определяет большой круг, у которого точка А определяет направление на Солнце. В этом случае Η /2 и координа ты граничных точек определяются соотноше
ниями: |
|
|
|
|
sin B cos A cos ; |
|
|
||
|
1 |
|
|
(2.2.93) |
|
|
|
||
tg ( B A ) |
|
tg . |
|
|
sin A |
|
|||
|
|
|
|
|
Для КА, осуществляющего наблюдение поверхности Земли образуется непрерывная полоса обзора (рис.2.2.20).
При отсутствии вращения Земли трасса КА представляет собой большой круг. Гра ницы полосы обзора отстоят от нее в случае
Рис. 2.2.18. Видимость КА «Союз» на первых витках полета

Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
90 |
Глава 2.2. ОРБИТАЛЬНОЕ ДВИЖЕНИЕ |
|
|
Рис. 2.2.19. Положение терминатора в местный полдень Декретного Московского времени в день летнего солн цестояния (22 июня, ds 23 )
ским радиусом /2 С с использова
нием соотношений (2.2.91), положив
А /i, А ВУ / /2 и Η /2 С. Однако за счет вращения Земли на
клон трассы к параллели будет отли чаться от наклона для малого круга на поверхности сферы. Наклон трас сы КА и граничные точки полосы об зора представлены на рис. 2.2.21.
Уравнения для определения этого
угла |
|
вид: |
|
|
|
|
|
||
|
d |
|
cosu sini |
; |
|
|
|||
|
|
|
|
|
|
|
|
||
|
du |
cos |
|
|
|||||
|
|
|
|
|
(2.2.94) |
||||
|
d |
|
cosi |
|
; |
|
|||
|
|
|
|
|
|
|
з |
. |
|
|
du |
|
cos2 |
|
; |
|
|||
Рис. 2.2.20. Полоса обзора
круговой орбиты на постоянный геоцентри ческий угол С. В этом случае они могут быть определены как малые круги со сфериче
Рис. 2.2.21. Наклон трассы КА и граничные точки полосы обзора
Откуда определяется угол наклона трассы (см. рис. 2.2.21):
d / du |
|
||
Ι arctg |
|
. |
(2.2.95) |
d / du |
|
||
Полагая / /2 Ι; А ; А ; и Η/2 С ( , — координаты трассы КА) в
(2.2.91), определяются две граничные точки полосы обзора.
Для географической визуализации полета КА обычно используются цилиндрические про екции. Однако в ряде случаев более наглядным является применение других картографических проекций. Основные виды географических проекций разделяются на три типа:
–цилиндрические;
–конические;
–азимутальные.
Для каждого типа имеется множество разновидностей, различающихся степенью сжатия и преобразования различных геогра фических областей. На рис. 2.2.22–2.2.24 по казаны геометрические иллюстрации образо вания указанных типов проекций, и для срав нения представлены отображения трасс со средним наклонением i 45 и высоким на клонением i 85 (для КА на круговой орбите h − 1680 км, Т 2 ч), а также полей обзора на блюдателей на Гринвичском меридиане с ши ротами 0; 40; 80 .
Цилиндрические проекции дают нагляд ное представление приэкваториальной зо ны и средних широт. Конические проекции учитывают эффект изменения длины паралле ли при изменении широты, тем самым более точно отображают площадь областей, находя
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
БАЛЛИСТИЧЕСКИЕ УСЛОВИЯ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ |
91 |
|
|
Рис. 2.2.22. Цилиндрическая проекция
Рис. 2.2.23. Коническая проекция
Рис. 2.2.24. Азимутальная проекция