1. 2. 3. Угловое ускорение.
Для
характеристики быстроты изменения
вектора угловой скорости
![]() при
неравномерном вращательном движении
твердого тела вокруг неподвижной оси
(или точки) вводится понятие вектора
углового ускорения.
при
неравномерном вращательном движении
твердого тела вокруг неподвижной оси
(или точки) вводится понятие вектора
углового ускорения.
Угловым
ускорением называется
вектор
![]() равный производной по времени от угловой
скорости или второй производной от угла
поворота:
равный производной по времени от угловой
скорости или второй производной от угла
поворота:
|
|
(1.23) |
Единица измерения углового ускорения - 1рад/с2.
При
вращении тела вокруг неподвижной оси
изменения вектора
![]() обусловлены изменениями его численного
значения.
обусловлены изменениями его численного
значения.
Вектор
![]() направлен вдоль оси вращения, в ту же
сторону что и вектор
направлен вдоль оси вращения, в ту же
сторону что и вектор![]() при
при![]() (при равноускоренном
движении) и при
(при равноускоренном
движении) и при
![]() – в противоположную сторону (при
равнозамедленном движении).
– в противоположную сторону (при
равнозамедленном движении).
1. 3. Связь линейных и угловых кинематических величин.
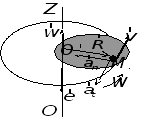
Рассмотрим
произвольную точку М твердого тела,
вращающегося вокруг неподвижной оси
OZ
с
угловой скоростью
![]() ,
которая
описывает окружность радиуса R
с
центром в точке О.
(Рис.
1.10).
,
которая
описывает окружность радиуса R
с
центром в точке О.
(Рис.
1.10).
Вектор
линейной скорости
![]() (и
перемещения
(и
перемещения
![]() )
точки
M
лежит
в плоскости перпендикулярной оси
вращения OZ
и
перпендикулярен вектору вектору угловой
скорости
)
точки
M
лежит
в плоскости перпендикулярной оси
вращения OZ
и
перпендикулярен вектору вектору угловой
скорости
![]() (и
углового перемещения
(и
углового перемещения
![]() )
и
радиус-
)
и
радиус-
|
|
вектору
Тогда
|
|
Рисунок 1.10. |
Следовательно,
|
|
(1.24) |
Т.к.
![]() ,
то в скалярной форме:
,
то в скалярной форме:
|
|
(1.25) |
Полученное выражение (1.24) носит название формулы Эйлера. Для ускорения получаем:
|
|

Учтем, что
|
|
|
и окончательно получим:
|
|
(1.26) |
Первый член в правой части полученного выражения представляет собой рассмотренное ранее тангенциальное ускорение:
|
|
(1.27) |
Второй член в правой части, учитывая (1.24), преобразуем к виду:
|
|
(1.28) |
т.е. он представляет собой нормальное ускорение.
|
Пример . |
Решение: Имеем по определениям угловой скорости и углового ускорения
По формулам (1.27) и (1.28) находим
По формуле (1.18) находим
Угол
равен арктангенсу отношения нормального
и тангенциального отношения (с точностью
до
|
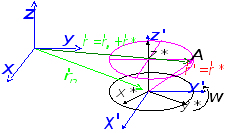
1. 4. Преобразование координат, скоростей и ускорений при переходе из одной системы отсчета в другую.
Пусть
движение точки
![]() в системе отсчета
в системе отсчета![]() задано законом
задано законом![]() .
При этом система отсчета
.
При этом система отсчета![]() совершает относительно неподвижного
наблюдателя сложное движение. Ставится
задача о связи кинематических
характеристиках движения этой точки в
системах отсчета
совершает относительно неподвижного
наблюдателя сложное движение. Ставится
задача о связи кинематических
характеристиках движения этой точки в
системах отсчета![]() и
и![]() ,
которая неподвижна относительно
наблюдателя. Представим это сложное
движение системы как сумму поступательного
движения системы
,
которая неподвижна относительно
наблюдателя. Представим это сложное
движение системы как сумму поступательного
движения системы![]() относительно
относительно![]() и вращения системы
и вращения системы![]() относительно
относительно![]() с угловой скоростью
с угловой скоростью![]() (см. рис.1.11).
(см. рис.1.11).
|
|
|
Рисунок 1.11. |
Тогда имеем уравнение
|
|
(1.29) |
где
![]() - радиус-вектор точки
- радиус-вектор точки![]() с системе
с системе![]() ,
,![]() - радиус-вектор начала отсчета системы
- радиус-вектор начала отсчета системы![]() в
в![]() ,
,![]() =
=![]() -
радиус-вектор точки
-
радиус-вектор точки![]() с системе
с системе![]() (или
(или![]() ,
т.к. в системах
,
т.к. в системах![]() и
и![]() - радиус-векторы точки
- радиус-векторы точки![]() [
[![]() и
и![]() соответственно] совпадают).
соответственно] совпадают).
Найдем связь (преобразование) скоростей и ускорений точки в этих системах. Для установления преобразования скоростей дифференцируем (1.29). Имеем:
|
|
(1.30) |
где
![]() -скорость начала
координат системы отсчета
-скорость начала
координат системы отсчета
![]() в системе
в системе
![]() илипереносная
скорость,
илипереносная
скорость,
![]() -скорость точки
в системе
-скорость точки
в системе![]() отсчета
отсчета![]() или относительная
скорость (для
неподвижного наблюдателя).
или относительная
скорость (для
неподвижного наблюдателя).
Аналогично для ускорений получаем
|
|
(1.31) |
где
![]() -ускорение начала
координат системы отсчета
-ускорение начала
координат системы отсчета
![]() в системе
в системе
![]() илипереносное
ускорение,
илипереносное
ускорение,
![]() -ускорение точки
С в
системе отсчета
-ускорение точки
С в
системе отсчета![]() или относительное
ускорение (для
неподвижного наблюдателя).
или относительное
ускорение (для
неподвижного наблюдателя).
Найдем
![]() и
и
![]() .
Для этого несколько
упростим задачу: будем
.
Для этого несколько
упростим задачу: будем
|
|
считать,
что система отсчета
Отметим, что согласно постулатам (аксиомам) классической физики расстояние между точками и временные интервалы между событиями в |
|
Рисунок 1.12. |
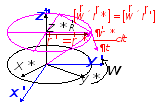
различных системах отсчета одинаковы.
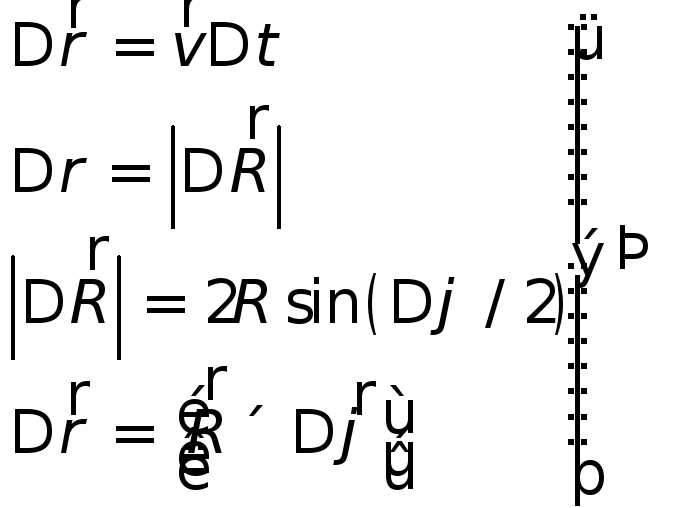
Следовательно,
изменение радиус-векторов точки
![]() в указанных системах отсчета
в указанных системах отсчета![]() .
Но, изменение вектора
.
Но, изменение вектора![]() есть только произведение скорости
есть только произведение скорости![]() точки
точки![]() в системе отсчета
в системе отсчета![]() на промежуток времени
на промежуток времени![]() ,
а изменение вектора
,
а изменение вектора![]() есть результат перемещения
есть результат перемещения![]() точки
точки![]() системе отсчета
системе отсчета![]() и поворота вектора
и поворота вектора![]() на угол
на угол![]() ,
т. е.
,
т. е.
|
|
(1.32) |
Следовательно,
скорости точки
![]() в этих системах отсчета связаны
соотношением
в этих системах отсчета связаны
соотношением
|
|
(1.33) |
Отметим,
что в этом случае
![]() - есть относительная, а
- есть относительная, а![]() переносная скорости.
переносная скорости.
Найдем
изменение скорости
![]() точки
точки![]() в системе отсчета
в системе отсчета![]() за промежуток времени
за промежуток времени![]() :
:
|
|
(1.34) |
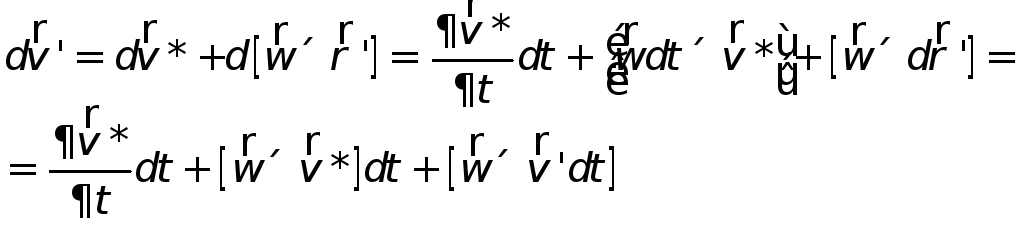
Тогда для ускорений получаем
![]()
![]()
|
|
(1.35) |
Заметим,
что векторное произведение
![]() остается неизменным и по величине и по
направлению для всех векторов
остается неизменным и по величине и по
направлению для всех векторов![]() ,
начала которых лежат на оси вращения.
Удобно ввести вектор
,
начала которых лежат на оси вращения.
Удобно ввести вектор![]() ,
направление которого перпендикулярно
оси вращения. Тогда
,
направление которого перпендикулярно
оси вращения. Тогда![]() =
=![]() и
и![]() .
.
Следовательно,
![]()
Поэтому выражение (1.35) примет вид
|
|
(1.36) |
а выражение (1.31) запишем так
|
|
(1.37) |
Раскроем
смысл входящих сюда величин.
![]() - ускорение тела относительно неподвижного
наблюдателя, с которым связана система
отсчета
- ускорение тела относительно неподвижного
наблюдателя, с которым связана система
отсчета![]() ,
,![]() - ускорение тела в системе отсчета
- ускорение тела в системе отсчета![]() ,
,![]() - ускорение начала координат системы
отсчета
- ускорение начала координат системы
отсчета![]() ,
движущейся поступательно относительно
,
движущейся поступательно относительно![]() ,
,![]() - так называемоецентростремительное
ускорение и, наконец,
- так называемоецентростремительное
ускорение и, наконец,
![]() -кориолисово или
поворотное ускорение.
-кориолисово или
поворотное ускорение.
Итак, кинематические величины тела в вышеупомянутых системах отсчета связаны следующим образом
|
Система отсчета |
Радиус-вектор |
скорость |
ускорение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|