

СУАЭ / № 5
.docxДисциплина: ПП.03.05 «Системы управления автоматизированного
электропривода»
Блок модулей 2 (ПП.03.05.01) «Системы автоматизированного управления
электроприводом»
Модуль 2.1 (3 ПФ.С.11.ЗР.З.01.01) «Разомкнутые системы автоматизированного
управления электроприводом»
Лекция № 5
«Принципы автоматического управления пуском и торможением
электродвигателей. Понятие о релейно-контакторных системах управления электроприводом»
План:
1. Принципы автоматического управления пуском и торможением электродвига-
телей.
2. Понятие о релейно-контакторных системах управления электроприводом.
Пункт 1 - Принципы автоматического управления пуском и торможением
электродвигателей.
Автоматизация пускового процесса значительно облегчает управление электродвигателями, устраняет возможные ошибки при пуске и ведет к повышению производительности механизмов.Наиболее просто осуществляется автоматизация для асинхронного двигателя с короткозамкнутым ротором, поскольку управление пуском здесь сводится в подавляющем большинстве случаев к прямому включению двигателя на полное напряжение сети.
Для мощных синхронных и асинхронных двигателей с короткозамкнутым ротором пуск иногда осуществляется переключением обмотки статора с пониженного напряжения на номинальное напряжения.
Для асинхронных двигателей с фазным ротором и двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются. Процесс торможения двигателей также может быть автоматизирован. После команды на торможение с помощью релейно-контакторной аппаратуры осуществляются необходимые переключения в силовых цепях. При подходе к скорости, близкой к нулю, двигатель отключается от сети. В процессе пуска выключение ступеней происходит через определенные интервалы времени либо в зависимости от других параметров; при этом изменяются ток и скорость двигателя.
Автоматическое управление позволяет более точно выдержать заданные условия пуска и освобождает человека от выполнения утомительных операций.
Автоматическое управление пуском двигателя осуществляется в функции Э.Д.С. (или скорости), тока, времени и пути.
Пункт 2 - Понятие о релейно-контакторных системах управления
электроприводом.
Под термином «Релейно-контакторные системы управления» (РКСУ) понимаются логические системы управления, построенные на релейно-контакторной элементной базе и осуществляющие автоматизацию работы двигателей. В задачу РКСУ входит автоматизация следующих операций:
1 - включение и отключение двигателя;
2 - выбор направления и скорости вращения;
3 - пуск и торможение двигателя;
4 - создание временных пауз в движении;
5 - защитное отключение двигателя и остановка механизма.
Данные операции требуются для выполнения необходимого по технологическим условиям движения рабочего органа механизма.
Непосредственным объектом управления для РКСУ является двигатель, питаемый от сети. Электропривод, выполненный на такой основе, представляет собой простой нерегулируемый электропривод, в основном общепромышленного применения (например, электропривод кранов, тихоходных лифтов, конвейеров, компрессоров, вентиляторов, насосов, некоторых транспортных устройств и т.п.). При этом, как уже было сказано ранее, применяются двигатели асинхронные, синхронные, постоянного тока с последовательным и смешанным возбуждением.
Далее приведены некоторые технические характеристики релейно-контакторной аппаратуры:
Быстродействие: - время срабатывания tср, с................... 0,005...0,1
- число включений в час N................... 600... 1200 для контакторов,
1200...3600 для реле; 40000 для герконов.
Масса т, кг........................................................................... 0,03...5
Потребляемая мощность Sn, В-А ………………………… 5... 50 для контакторов;
0,2... 5 для реле.
Срок службы - общее число включений...............................106……107.
К достоинствам РКСУ следует отнести:
- наличие гальванической развязки цепей;
- значительную коммутационную мощность;
- высокую помехоустойчивость;
- возможность использования единого источника питания для силовых и управляющих цепей.
Недостатками РКСУ являются:
- контактная коммутация, требующая соответствующего ухода за аппаратурой и ограничивающая срок ее службы;
- ограниченное быстродействие;
- повышенные массо-габаритные показатели и энергопотребление.
В составе РКСУ можно выделить по функциональному назначению две части: управляющую, формирующую алгоритм управления (реле - Р), и исполнительную, непосредственно осуществляющую управляющие воздействия на двигатель (контакторы - К) (рис. 1).
Управляющую часть можно подразделить на две составляющие: Р 1 - формирующую общие команды на движение механизма (М) согласно технологическому режиму его работы (верхний уровень управления), и Р2 - формирующую необходимое качество движения (нижний уровень управления). Функционально разделенные части Р 1 и Р 2 конструктивно могут быть как разделены, так и объединены в виде единого управляющего устройства, например, единой панели управления.
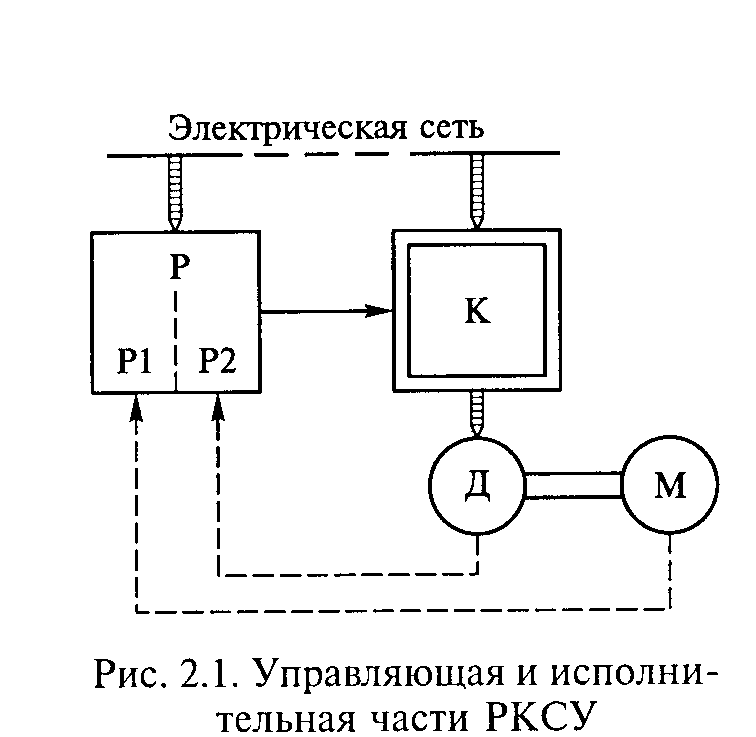
Рисунок 1 – Управляющая и исполнительная части РКСУ
Через двигатели (Д) РКСУ управляют движением рабочего органа (РО) производственной установки с определенным технологическим назначением. В разных установках РКСУ выполняют различные технологические задачи - перемещение грузов, подачу воды, воздуха, смазки, повороты регулирующих вентилей и задвижек и т.п.
Однако для выполнения разных технологических задач требуется набор некоторых одинаковых операций. К ним относятся так называемые типовые функции. В выполнении одной такой функции участвует не вся РКСУ, а только ее часть - типовой узел. Таким образом, в составе РКСУ всегда будут присутствовать те или иные типовые узлы. Кроме них для решения конкретной технологической задачи требуются дополнительные, нетиповые, узлы, например, узел, формирующий программу технологического цикла работы установки, узел защиты рабочего органа от пробуксовки приводного шкива, превышения скорости и т.п.
Наиболее полную информацию о РКСУ управления дает так называемая принципиальная схема. В ней приводятся все элементы системы управления, изображенные и обозначенные в соответствии со стандартом, отображены все электрические соединения элементов. Допускается изображение какого-либо узла без раскрытия его внутреннего содержания, т. е. с показом только его электрических входов и выходов для соединения с другими узлами и источниками питания. При этом указываются наименование типового узла и источник информации о нем. Если узел не стандартный, то его схема должна быть дополнительно приведена как приложение к принципиальной схеме. Контакты одного и того же аппарата разнесены в принципиальной схеме по разным цепям, которые этими контактами коммутируются. Схема не дает пространственного расположения аппаратуры, по ней затруднительно выполнить монтаж электрических соединений аппаратов. Поэтому дополнительно к принципиальной схеме в проектной документации дается схема электрических соединений с изображением аппаратов в собранном виде и соединяющих их электропроводов.
Важнейшей типовой функцией, возлагаемой на РКСУ, является защита электрической и механической частей электропривода от аварийных режимов. Задача узла защиты - отключить двигатель от источника питания и остановить рабочий орган производственной машины.
Аварийными режимами в электрических цепях двигателя могут быть: короткие замыкания, кратковременные и длительные перегрузки по току двигателя, перебои в электроснабжении, недопустимое снижение напряжения сети. Аварийная пауза в электроснабжении может привести после возобновления электроснабжения к самозапуску двигателя и не контролируемому оператором движению рабочего органа. Для исключения самозапуска используется так называемая нулевая защита (нулевая блокировка), осуществляемая с помощью кнопки управления с самовозвратом или командоконтроллера с нулевым замыкающим контактом. При недопустимом уровне снижения напряжения для номинально загруженных асинхронных и синхронных двигателей возникают токовые перегрузки. Кроме того, из-за разных коэффициентов возврата аппаратов управления нарушается правильная работа РКСУ. Защита от недопустимого уровня снижения напряжения выполняется с помощью реле напряжения с высоким коэффициентом возврата.
Аварийными режимами для механической части электропривода могут быть: превышение допустимого момента в механической передаче (заклинивание механизма); расцепление рабочего органа (РО) с валом двигателя; превышение допустимой скорости двигателя или РО; выход РО за пределы зоны допустимых перемещений. Наиболее опасным является расцепление РО с валом двигателя в пассажирских подъемно-транспортных установках с активным моментом нагрузки (лифты, канатные дороги, эскалаторы), когда возможен наезд с большой скоростью РО на жесткую преграду. Защита от такого аварийного режима выполняется установкой тормозной системы непосредственно на РО.
Контрольные вопросы для закрепления изученного материала:
1. Для какого типа двигателя наиболее легко реализуется автоматизированная система управле-
ния?
2. В функциях каких элетрических величин может быть осуществлён автоматический пуск и
дальнейшее управление электроприводом?
3. Что понимают под термином «Релейно-контакторные системы управления»? Автоматизация
каких операций обычно входит в задачу РКСУ?
4. Что необходимо отнести к достоинствам и недостаткам РКСУ?
5. Перечислите возможные аварийные режимы в электрических цепях двигателя.
6. Перечислите возможные аварийные режимы для механической части электропривода.
Источники для дополнительного изучения материала лекции:
1. Петренко Ю.Н.Системы автоматизированного управления електроприводами – Минск: Новое
знание, 2004 г., стр. 14 - 15.
2. Терехов В. М., Осипов О.И. Системы управления электроприводов – М.: Академия, 2005 г.,
стр. 11 - 23.
3. Чиликин М.Г., Сандлер А.С. Общий курс электропривода – М.; Энергоатомиздат, 1981 г.,
стр. 394 - 395.