

СУАЭ / № 2
.docxДисциплина: ПП.03.05 «Системы управления автоматизированного
электропривода»
Блок модулей 1 (ПП.03.05.01) «Механические характеристики электроприводов,
принципы регулирования скорости электропри-
водов»
Модуль 1.1 (3 ПФ.С.11.ЗР.З.01.01) «Механика электропривода»
Лекция № 2
«Основное уравнение движения электропривода. Основные сведения о
механических характеристиках производственных механизмов и
электродвигателей»
План лекции:
1. Основное уравнение движения электропривода.
2. Основные сведения о механических характеристиках производственных
механизмов и электродвигателей.
Пункт 1 - Основное уравнение движения электропривода.
Уравнения движения электропривода описуется с помощью основных законов движения, известных Вам из курса физики. А известно следующее - движение каких-либо тел, механических звеньев или кинематической цепи любой рабочей машины подчиняется законам Ньютона.
Первый закон Ньютона - закон инерции. Для поступательного движения этот закон гласит, что каждое тело сохраняет состояние покоя или прямолинейного равномерного движения до тех пор, пока внешние силы (Примечание: обозначаются в физике латинской буквой F) не выведут его из этого состояния. Так как на тело всегда действует несколько внешних сил (например, сила, создаваемая двигателем, сила тяжести, силы трения и другие), для того, чтобы это тело находилось в состоянии покоя или прямолинейного равномерного движения необходимо, чтобы векторная (алгебраическая) сумма сил, действующих на тело, была равна нулю. Применительно к вращательному движению первый закон Ньютона может быть сформулирован следующим образом: тело, имеющее фиксированную ось вращения, будет находиться в состоянии покоя или равномерного вращения до тех пор, пока приложенные из вне моменты не выведут его из этого состояния.
Момент М является физическим аналогом силы F для вращательного движения, а также формируется с непосредственным участием прилаживаемой силы F. Формирование момента может быть пояснено с помощью следующего рисунка:

Рисунок 1 – Формирование крутящего момента во вращающемся теле
Момент создается силой F, прилаживаемой к так называемому плечу вращающегося тела (Примечание: плечо - кратчайшее расстояние от оси вращения до линии действия силы). Т.е. величина момента, возникающего во вращающемся теле, зависит от диаметра данного тела и от величины приложенной силы – М = F·R. Другими словами, чем сильней Вы раскрутите, к примеру, с помощью руки какой-то диск с зафиксированной осью, то тем больший изначальный момент Вы ему зададите и тем дольше он будет вращаться вокруг оси. И тем дольше такой диск может вращаться, чем больше будет его диаметр, а соответственно и радиус. На данном принципе строится работа маховиков – крупных вращающихся тел, которые после передачи им какого-либо начального значения силы, за счёт своего большого диаметра могут развивать большой крутящий момент, а в дальнейшем накапливать и передавать другим механизмам огромное количество кинетической энергии.
Далее необходимо рассмотреть все виды моментов, с которыми имеют дело при изучении работы любой системы «Электрический двигатель – механизм» («Электропривод»).
1). Вращающий момент М двигателя - создается в результате взаимодействия магнитных полей неподвижной части двигателя (статора) и поля вокруг проводов обмотки подвижной части двигателя (ротора), создаваемого током, протекающим в этой части двигателя.
Формирование вращающегося момента в электродвигателе можно пояснить с помощью следующего рисунка:
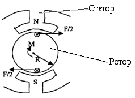
Рисунок 2 – Формирование крутящего момента в электрическом двигателе
Создаваемый на валу электродвигателя вращающий момент в основном зависит от угловой скорости и мощности самого двигателя:
![]()
где М - вращающий момент электродвигателя, Н·м;
Р - мощность электродвигателя, Вт;
ω - угловая скорость, с-1 или 1\сек.
2. Момент статического сопротивления МСТ. Во время работы любого механизма возникает некоторое противодействующее усилие, направленное обычно навстречу прилагаемому усилию. Например, при фрезеровании, сверлении, точении в месте соприкосновения инструмента и обрабатываемой детали появляется сила трения, всегда направленная против движения и стремящаяся затормозить движение. Если изменить направление вращения фрезы, сверла или детали на токарном станке, то и сила трения изменит свое направление, и опять будет направлена на встречу движению усилия. Физическая величина её будет зависеть от твердости материала, подачи и глубины резания. Такую силу называют статической силой сопротивления FСТ, а момент ею вызванный - статическим моментом сопротивления МСТ. Электродвигатель должен постоянно преодолевать этот момент, поэтому он и потребляет от сети электроэнергию.
Определение: Под статическим моментом сопротивления любого механизма понимается такой вращающий момент на валу этого механизма, который создается различными статическими силами нагрузки: любого рода силами трения, резания, скручивания, сжатия, растяжения и т. п.
В зависимости от назначения и свойств механизма статический момент может оставаться постоянным или изменятся в зависимости от скорости, пути, времени и т.д.. В некоторых случаях он может вместо тормозящего действия оказывать движущее действие, способствуя вращению. В связи с этим статические моменты могут быть разделены на две категории:
1) категория реактивных моментов;
2) категория активных (потенциальных) моментов.
Статический момент сопротивления, возникающий только при движении и всегда направленный против движения, называется реактивным. Эти моменты всегда противодействуют вращению электропривода, всегда являются тормозящими. Большинство механизмов - вентилятор, насос, транспортные средства - имеют реактивный момент сопротивления.
Статический момент сопротивления, направленный всегда в какую-либо одну сторону, независимо от направления вращения, называют активным (потенциальным). Эти моменты называют потенциальными, так как они связаны с изменением потенциальной энергии отдельных элементов привода. Они могут быть отрицательными и положительными в зависимости от того, тормозят они или способствуют вращению привода. В связи с этим в основном уравнении движения (см. формулу 1) знак минус перед моментом МСТ указывает на тормозящее действие момента. При спуске груза, раскручивании пружины в основном уравнении движения (см. формулу 1) перед МСТ ставится знак плюс, так как в этих случаях момент сопротивления способствует вращению привода.
3. Момент динамического сопротивления МДИН. Явление динамического момента можно пояснить с помощью второго закона Ньютона – закона динамики (курс физик). Этот закон устанавливает, что если результирующая сила воздействия на тело имеет значение, отличное от нуля, то тело получает ускорение или замедление, величина которого зависит от величины приложенной силы и времени ее приложения.
Момент динамического сопротивления во вращающейся системе может возникнуть только при изменении скорости вращения вала электрического двигателя, т.е. при переходном процессе: пуске, ускорении, замедлении и т.п. Причём, при пуске или другом переходном процессе, связанным с ускорением электродвигателя, момент динамического сопротивления всегда будет создавать для вала электродвигателя дополнительную нагрузку (сопротивление), т.к. электродвигателю приходится часть своей кинетической энергии отдать остальным массам, находящимся у него на валу, т.е задать начальный, либо изменённый по величине, момент инерции. И наоборот, при переходном процессе, связанным с замедлением электродвигателя, момент динамического сопротивления всегда будет одинаково направлен с вращающим моментом самого электродвигателя, способствуя ему в преодолении какой-либо статической нагрузки на валу. Это связано всё с тем же высвобождением накопленной кинетической энергии во вращающихся массах электропривода, т.е. опять имеем дело с моментом инерции, но в этот раз энергия затрачивается не на её создание, а наоборот – используется энергия накопленной инерции J.
Характер движения электропривода описуется в большинстве случаев при помощи ОСНОВНОГО УРАВНЕНИЯ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА. Исследование влияния различных величин, входящих в это уравнение, даёт представление о режиме работы электропривода в том или ином режиме работы. Это уравнение имеет следующий вид:
± М ∓ МСТ = МДИН,
или ± М ∓ МСТ = J·(dω/dt ), (1)
где М - вращающий момент двигателя, Н·м;
МСТ - приведенный к валу двигателя момент сопротивления рабочего механизма, Н·м;
J - приведенный к валу двигателя момент инерции электропривода, кг·м2;
ω - угловая частота вращения двигателя, с-1 или 1\сек.
Правая часть основного уравнения движения – это и есть динамический момент (J·(dω/dt) = МДИН). В соответствии с основным уравнением движения значение динамического момента МДИН определяется разностью между моментом двигателя и моментом статического сопротивления. При условии, когда момент двигателя М становится больше значения MСТ электродвигатель ускоряет свое движение, а если момент М становится меньше значения МСТ – электродвигатель замедляет движение, т.е. можно сказать, что появление положительного момента динамического сопротивления обусловлено разгоном электропривода, а появление отрицательного момента динамического сопротивления – замедлением электропривода.
Пункт 2 - Основные сведения о механических характеристиках производ-
ственных механизмов и электродвигателей.
При выборе электродвигателя для производственного механизма необходимо выявить соответствие его механических свойств характеристикам этого механизма.
Соответствие механических характеристик производственного механизма и электродвигателя способствует повышению надежности, производительности, экономичности работы машины, ее долговечности, повышению качества выполнения технологического процесса и. т. п. Поэтому при выборе электродвигателя прежде всего учитывают форму его механической характеристики.
Например: для привода средств, транспортирующих жидкий металл, целесообразно использовать электродвигатель, имеющий мягкую механическую характеристику. Такой двигатель обеспечивает плавный пуск и торможение, плавно преодолевает перегрузки, не перегружает сеть пиками тока. Для привода валков прокатного стана целесообразно использовать электродвигатель с жесткой механической характеристикой, поскольку снижение скорости при случайном увеличении нагрузки может привести к ухудшению качества проката и снижению производительности стана.
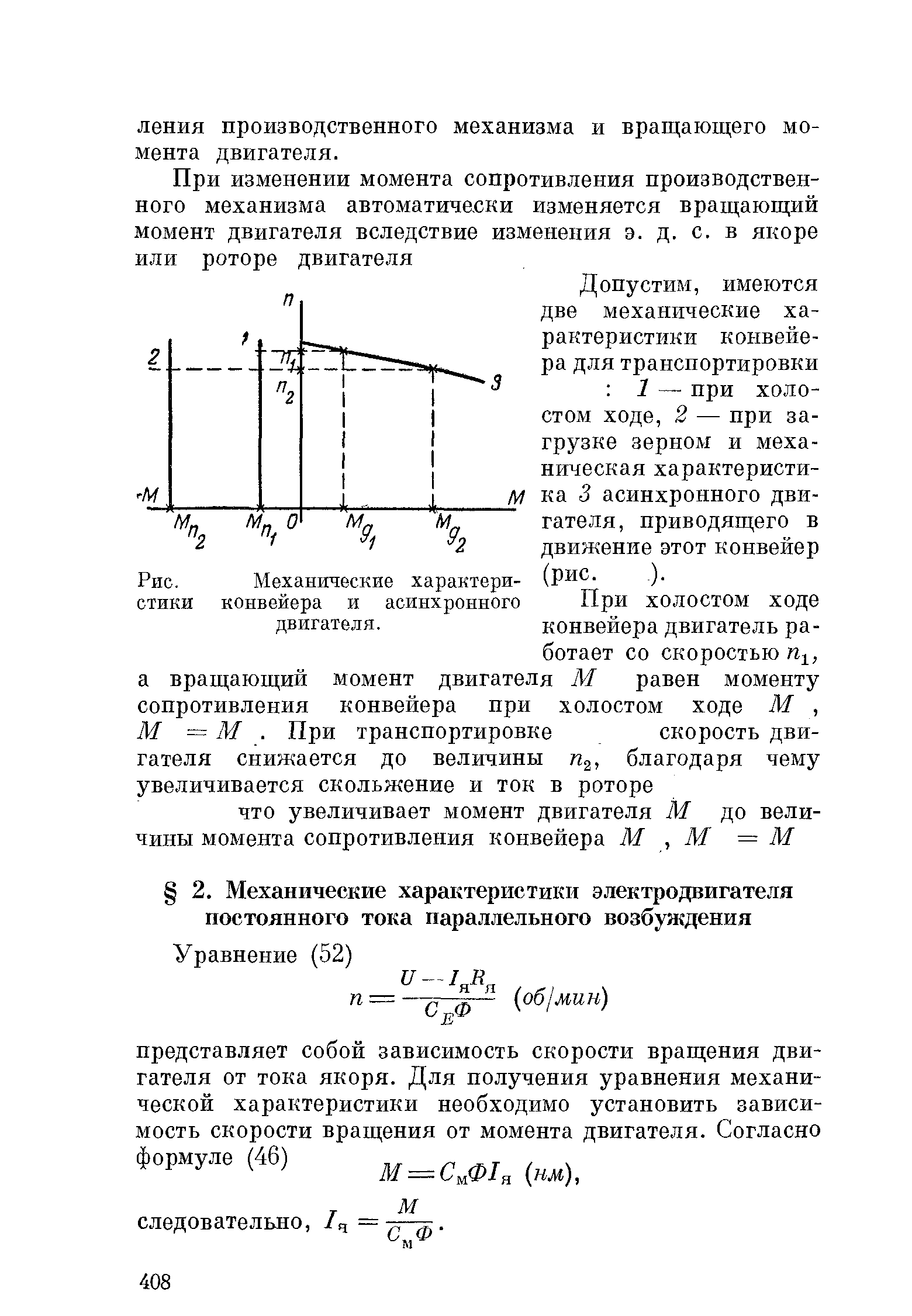
Механической характеристикой производственного механизма называют зависимость между его скоростью и моментом статического сопротивления, создаваемого этим механизмом. Обычно записуется в виде соотношения п = f(Мс). Механические характеристики производственных механизмов можно ориентировочно разбить на такие основные категории:


Механической характеристикой электродвигателя называют зависимость его скорости вращения от момента, развиваемого электродвигателем. Обычно записуется в виде соотношения п = f(М).
У подавляющего большинства электродвигателей прп увеличении нагрузки скорость вращения уменьшается. В зависимости от степени изменения скорости с изменением момента различают три основные категории механических характеристик электродвигателей:
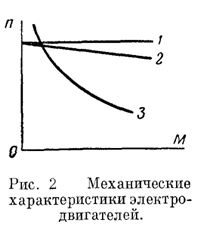
Кроме вышеуказанной классификации механические характеристики электродвигателей могут быть естественными - при номинальных параметрах питающего напряжения и отсутствии реостатов в цепях обмоток электродвигателя и искусственными, когда параметры питающего напряжения (его величина, частота) отличаются от номинального значения или когда в цепь двигателя введен реостат.
Оценить степень жесткости механической характеристики электродвигателя можно с помощью коэффициента жесткости β = dM/dω.
Следует иметь в виду, что в современном электроприводе с помощью систем автоматического управления можно формировать семейства механических характеристик нужного в данных условиях вида независимо от формы естественной механической характеристики электродвигателя.
Контрольные вопросы для закрепления изученного материала:
1. Поясните, каким образом формируется крутящий момент вращающегося тела?
2. Поясните, какие моменты участвуют в работе электропривода? В чём заключается краткий
физический смысл каждого из этих моментов?
3. Поясните, как формируется крутящий момент в электродвигателе и от чего зависит его
величина?
4. Поясните, как Вы понимаете физический смысл момента статического сопротивления МСТ.
5. При каких условиях работы привода возникает момент динамического сопротивления? Как
этот момент может повлиять на работу электропривода?
6. Сформулируйте основное уравнение движения электропривода. Что обозначают знаки «+» и
«-» перед его составляющими?
7. Что такое механическая характеристика производственного механизма?
8. Что такое механическая характеристика электродвигателя?
9. На какие основные категории можно ориентировочно разложить механические характеристи-
ки производственных механизмов? Приведите примеры механизмов по каждой из категорий.
10. На какие основные категории можно разложить механические характеристики электродвига-
телей? Какие типы двигателей можно отнести к каждой из категорий?
11. Что представляют собой искусственная и естественная механические характеристики
электродвигателя?
12. Для чего используют коэффициент жёсткости? По какой формуле он определяется?