

Дисциплина: ПП.03.05 «Системы управления автоматизированного
электропривода»
Блок модулей 2 (ПП.03.05.01) «Системы автоматизированного управления
электроприводом»
Модуль 2.2 (3 ПФ.С.11.ЗР.З.01.01) «Замкнутые системы автоматизированного
управления электроприводом»
Лекция № 8
«Регуляторы, датчики координат электропривода»
План:
1. Регуляторы
2. Датчики координат электропривода.
Пункт 1 – Регуляторы.
Регулятор выполняет вычисление рассогласования и преобразует его в управляющее воздействие в соответствии с определенной математической операцией. В системах автоматизированного управления используются в основном следующие типы регуляторов: пропорциональный (П), интегральный (И), пропорционально-интегральный (НИ), пропорционально-интегрально-дифференциальный (ПИД). В зависимости от вида преобразуемых сигналов различают аналоговые и цифровые регуляторы.
Аналоговые регуляторы (АР) реализуются на основе операционных усилителей, цифровые - на основе специализированных вычислительных устройств или микропроцессоров.
Аналоговые регуляторы преобразуют только аналоговые сигналы, являющиеся непрерывными функциями времени. При прохождении через АР преобразуется каждое мгновенное значение непрерывного сигнала. Для реализации АР операционный усилитель (ОУ) включается по схеме суммирующего усилителя с отрицательной обратной связью. Тип регулятора и его передаточная функция определяются схемой включения резисторов и конденсаторов в цепях на входе и в обратной связи ОУ.
На рис. 1 - 4 приведены функциональные схемы регуляторов разных типов, построенных на базе операционного усилителя:
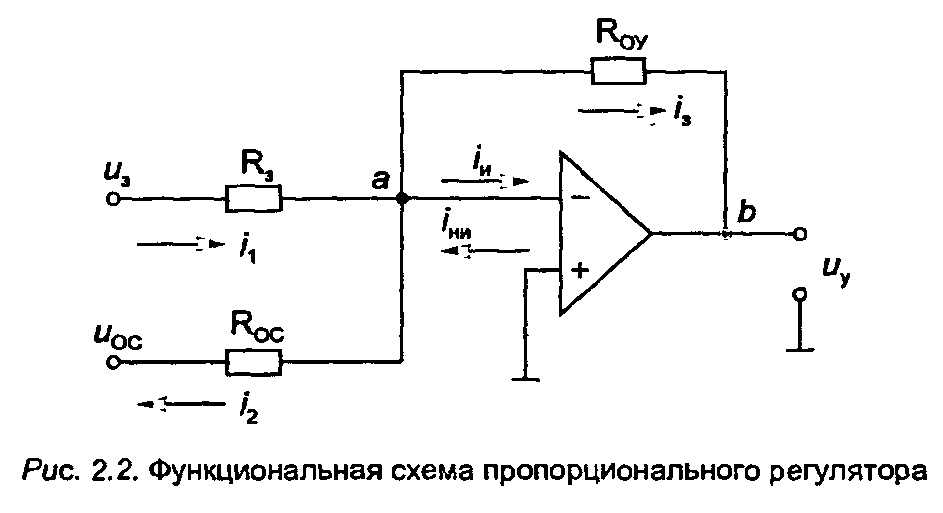
Рисунок 1 – Функциональная схема пропорционального регулятора
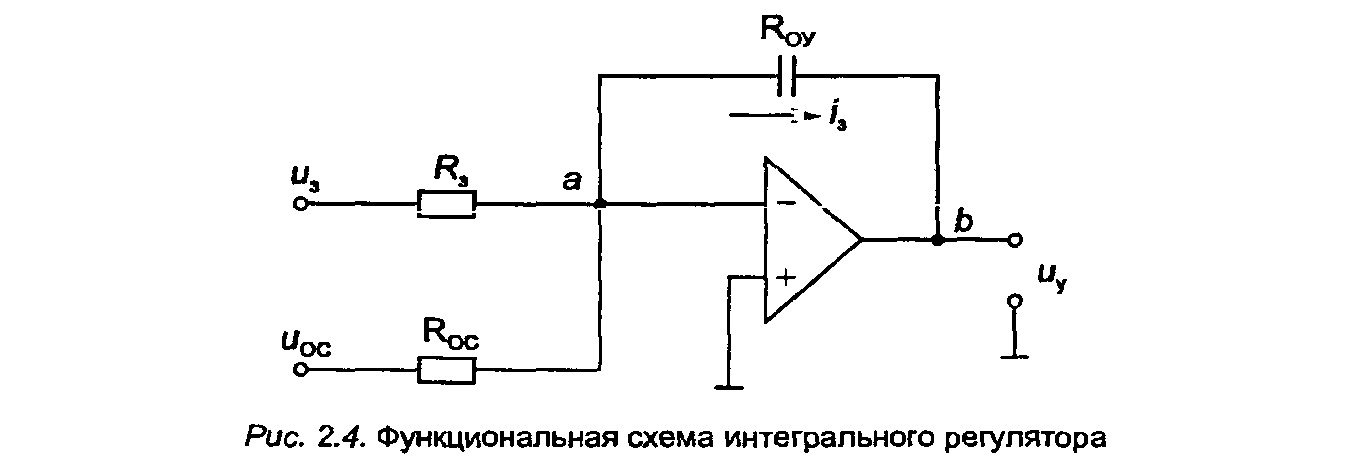
Рисунок 2 – Функциональная схема интегрального регулятора
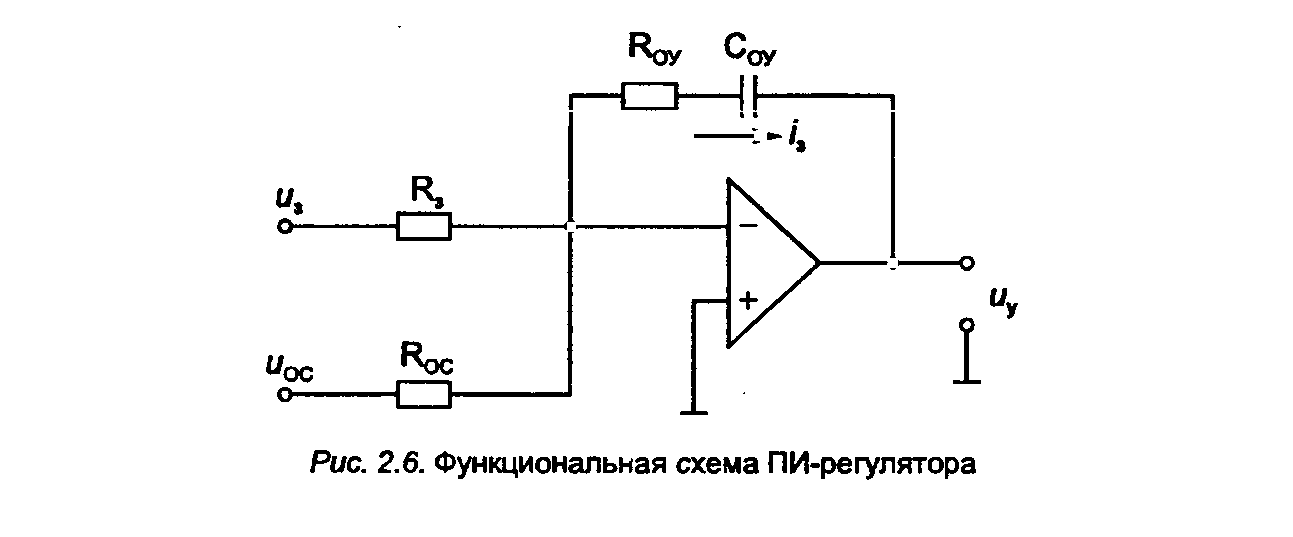
Рисунок 3 – Функциональная схема пропорционально-интегрального регулятора
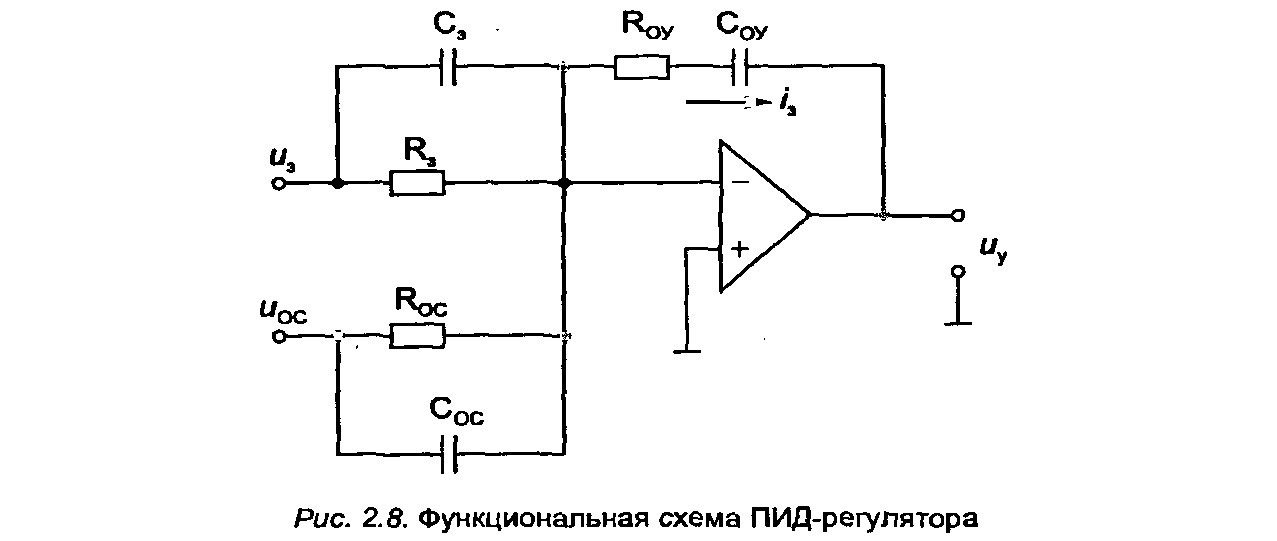
Рисунок 4 – Функциональная схема пропорционально-интегрально- дифференциального
регулятора
Пункт 2 - Датчики координат электропривода.
В автоматизированном электроприводе (АЭП) для получения сигналов обратной связи по управляемым координатам используются специальные приборы - датчики. Датчик АЭП представляет собой устройство, информирующее о состоянии управляемой координаты АЭП путем взаимодействия с ней и преобразования реакции на это взаимодействие в электрический сигнал, удобный для измерения, передачи, преобразования, хранения и регистрации, а также для воздействия им на управляемые процессы.
Управляемыми в АЭП являются следующие электрические и механические координаты: ток, напряжение, ЭДС, момент, скорость, перемещение и т.д. Для их измерения используют соответствующие датчики.
Датчик координат АЭП структурно может быть представлен в виде последовательного соединения измерительного преобразователя (ИП) и согласующего устройства (СУ) (рис. 1). Измерительный преобразователь преобразует координату Х в электрический сигнал напряжения U (или тока I), пропорциональный Х. Согласующее устройство осуществляет преобразование выходного сигнала U ИП в сигнал обратной связи Uос, который по величине и форме удовлетворяет системе управления электроприводом.

Рисунок 1 – Структурная схема датчика координат АЭП
Далее кратко рассмотрим принципы работы различных датчиков системы АЭП: