

ТСА / Лабораторные работы
.pdf9.1. Определение зависимости между коэффициентом передачи и положением рукоятки n
Для проведения эксперимента необходимо:
–переключатель блока ручного управления установить в положение "Ручное", нажав его слегка и повернув по часовой стрелке;
–переключатель 15 ("Регулятор") установить в положение "Включено" (рис.6.1.);
–рукоятку "Демпфер" установить в нулевое положение;
–установить: рукоятку 3 в положение 1,0; рукоятку в положение 0,4; рукоятку tu в положение 0,5; рукоятку в положение 0,8; рукоятку u в положение
500;
–рукоятку внешнего задатчика установить в среднее положение (50 %);
–переключатель 16 ("Печь") установить в положение "Выключено";
–нажать на кнопку "Контроль" преобразователя 12;
–после балансировки рукоятку n установить в положение n = 1,8;
–с помощью кнопок блока дистанционного управления (БРУ) перевести регулирующий орган в положение, равное 0 делениям ЛАТРа (yн). После чего переключатель БРУ перевести в положение "Автомат", слегка углубив его и подернув против часовой стрелки;
–внести регулятору ступенчатое возмущение путем изменения входной величины на 10%; для этого рукоятку внешнего задатчика резко сместить со среднего положение на отметку 60%; реагируя на входной сигнал, регулятор включится (загорится красный светодиод) и начнет отрабатывать управляющее воздействие (исполнительный механизм будет перемещать ось ЛАТРа со стрелкой). После отработки регулятором первого перемещения регулирующего органа (пропорциональная составляющая управляющего воздействия), то есть после первого погасания светодиода и остановки регулирующего органа, рукоятку БРУ необходимо перевести в положение "Ручное", а рукоятку задатчика – в среднее (исходное) положение.
–занести в табл. 9.1. начальные и конечные значения температуры и положения регулирующего органа.
На основании полученных данных вычислить коэффициент передачи регулятора:
Kp |
y |
|
|
|
yk |
yн |
|
, |
|
|
|
|
|
|
|
|
|||
x |
|
|
xk |
xн |
|
|
|||
|
|
|
|||||||
i |
|
|
|
|
|
|
|||
где yk и yн – соответственно конечное и начальное положения регулирующего органа, дел. ЛАТРа; хк и хн – конечное и начальное положения регулируемой величины, С.
Для получения достоверных значений Кр эксперимент следует повторить 4 раза; для этого при том же положении рукоятки n, задатчик установить в среднее положение, сбалансировать регулятор и в режиме БРУ "Автомат" внести такое же возмущение перемещением рукоятки задатчика, но в противоположную сторону.
На основании полученных данных найти среднее значение Kpср.:
Kcpp . Kp1 Kp2 Kp3 Kp4
4
21
Эксперименты следует выполнить для следующих положений рукоятки n: 1,8; 2,2; 3,0; 3,6 и 5,0.
После окончания эксперимента по полученным и вычисленным данным построить график зависимости между коэффициентом передачи и положением рукоятки n (рис. 9.1).
Таблица 9.1 – Результаты первого опыта
№№ |
Деление |
xн, |
xк, |
x=|xk-xн|, |
yн, |
yк, |
y=|yk-yн|, |
|
Kpср. |
рукоятки |
Kpi |
||||||||
п/п |
n |
°С |
°С |
°С |
дел. |
дел. |
дел. |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
0 |
|
|
|
|
2 |
1,8 |
450 |
|
|
80 |
|
|
|
|
3 |
|
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
||
4 |
|
|
|
|
80 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
2,2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
.... |
........... |
.... |
…. |
………. |
…. |
.... |
........... |
..... |
..... |
1 |
|
|
|
|
|
|
|
|
|
2 |
5,0 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
9.2. Снятие кривых разгона ПИ-регулятора.
Эксперимент по снятию кривой разгона проводят в такой последовательности:
–установить рукоятку БРУ в положение "Ручное";
–рукоятку внешнего задатчика установить в среднее положение;
–рукоятку n поставить в положение 1,8, а рукоятку u ("время изодрома") –
вположение 100; остальные рукоятки на панели регулятора оставить в тех же положениях, что и в предыдущем эксперименте;
–кнопкой БРУ стрелку ЛАТРа поставить против отметки 0 дел.;
–рукоятку переключателя БРУ перевести в положение "Автомат" и перемещением рукоятки задатчика со среднего положения на отметку 60 внести регулятору ступенчатое возмущение и одновременно начать отсчет времени по секундомеру; под действием входного сигнала регулятор сначала совершит первое перемещение регулирующего органа до значения y1. Следует определить
положение регулирующего органа y1 и время 1, за которое регулирующий орган переместится от значения ун = 0 дел. до y1.
В дальнейшем через определенные промежутки времени регулирующий орган будет совершать небольшие перемещения, отрабатывая интегральную составляющую управляющего воздействия.
22
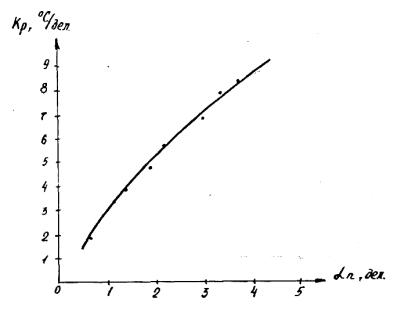
Рисунок 9.1 – Тарировочный график положения рукоятки n
Для построения кривой разгона необходимо определить положение регулирующего органа y2 после 4-5 небольших его перемещений и время 2, когда будет закончено последнее из них.
Полученные результаты занести в табл. 9.2.
Таблица 9.2 – Результаты второго опыта
n |
u |
xmн , С |
xmk , С |
x , С |
yн ,дел |
y1,дел |
1, c |
y2, дел |
2, c |
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
1,8 |
150 |
450 |
540 |
90 |
0 |
|
|
|
|
220 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
330 |
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
2,2 |
150 |
450 |
540 |
90 |
0 |
|
|
|
|
220 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
330 |
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
3,0 |
150 |
450 |
540 |
90 |
0 |
|
|
|
|
220 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
330 |
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
3,6 |
150 |
450 |
540 |
90 |
0 |
|
|
|
|
220 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
330 |
|
|
|
|
|
|
|
|
На основании данных табл. 9.2. построить кривую разгона ПИ-регулятора (рис. 9.2), для чего на рисунке строят точки А и В, соединив их, а также точки О и А прямыми линиями (прямая ОА – это пропорциональная составляющая
23
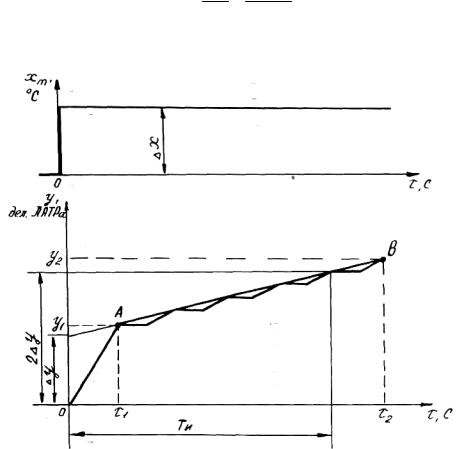
управляющего воздействия, а АВ – интегральная составляющая).Продолжив луч AB до оси ординат и обработав кривую разгона, как показано на рис. 9.2, определяют параметры настройки регулятора:
Kp yn y1 yн ,
x x
а также время изодрома (удвоения) Тu, за которое интегральная составляющая удваивает действие пропорциональной составляющей.
Рисунок 9.2 – Кривая разгона ПИ-регулятора
Эксперимент по снятию кривой разгона следует повторить для положений органов настройки регулятора, указанных в таблице 9.2.
На основании полученных параметров записать приближенное уравнение кривой разгона, ПИ-регулятора
|
|
|
|
|
|
|
||
y Kp x 1 T |
|
|
|
И |
|
9.3. Исследование переходных процессов, вызванных возмущениями по заданию Эксперимент проводят в следующей последовательности:
–рукоятку БРУ установить в положение "Ручное";
–универсальный переключатель 15 ("Регулятор") и пакетный выключатель 16 ("Печь") перевести в положение "Включено";
–с помощью кнопочной станции БРУ указатель ЛАТРа установить на отметку 40 делений;
–рукоятку ручного задатчика 1 установить в среднее положение;
–на основании параметров объекта управления об, Тоб и Коб по формулам табл. 7.1. вычислить значения коэффициента передачи регулятора и время
24
изодрома, соответствующие переходному процессу с 20-ти-процентным перерегулированием;
– используя тарировочный график и кривые разгона ПИ-регулятора, определить положения рукояток n ("коэффициент передачи") и время изодрома
и;
–установить значения Кр и Ти в регуляторе;
–установку рукояток регулятора tu, Тф, , , 3 произвести в положения, указанные в первом опыте;
–дождаться установившегося значения температуры печи;
–по шкале прибора 13 зафиксировать значение установившейся температуры, приняв его за начальное значение температуры xтн xзн ;
–если при этом регулятор не сбалансирован (горит одна из лампочек), то его балансировку выполняет руководитель занятия;
–после балансировки регулятора рукоятку БРУ перевести в положение "Автомат";
–внести возмущение по заданию, переместив стрелку задатчика 1 по указанию руководителя занятия и начать отсчет времени по лабораторному секундомеру;
–через каждые 15 с фиксировать значения температуры до тех пор, пока она не придет к новому установившемуся значению xтк ;
–результаты наблюдений занести в табл. 9.3.
Таблица 9.3. Переходный процесс, вызванный возмущением по заданию
|
|
xн |
x |
з |
n, C; |
xк n 100 200 |
, C |
|
|
||||||
|
|
т |
|
|
|
з |
|
|
|
|
|||||
, c |
0 |
15 |
|
30 |
45 |
60 |
|
75 |
90 |
|
105 |
|
и |
|
|
|
|
|
|
т.д. |
|
||||||||||
xт |
xтн |
|
|
|
|
|
|
|
|
|
|
|
|
|
xтк |
На основании данных табл. 9.3 построить график переходного процесса и определить его показатели качества: x1, xст, р и .
Повторить опыт по снятию переходного процесса для случая настройки регулятора на апериодический процесс.
10.Требования к отчету Отчет по лабораторной работе должен содержать:
–указания на цель работы;
–описание экспериментальной установки и ее схему;
–структурную схему регулятора;
–сущность каждого эксперимента с таблицами результатов наблюдений и вычислении;
–тарировочный график;
–графики кривых разгона регулятора с расчетом параметров настройки регулятора;
25
–расчет параметров настройки регулятора и определение положения органов его настройки;
–графики процессов регулирования с рассчитанными показателями качества;
11.Вопросы для самоподготовки
1.Назначение регулятора и его отдельных блоков и модулей
2.Принцип работы регулятора (по принципиальной электрической схеме)
3.Входные и выходные величины регулятора
4.Составьте структурную схему ПИ–регулятора и найдите его передаточную функцию
5.Параметры настройки регулятора; их физический смысл
6.Реализация обратных связей в регуляторе и их назначение
7.Законы регулирования, реализуемые в регуляторе
8.Сущность и цели экспериментального исследования регулятора.
9.Понятия объекта управления, регулятора и САУ.
10.Входные и выходные величину САУ.
11.Классификация CAУ в зависимости от вида заданного значения регулируемого параметра.
12.Показатели качества переходного процесса и их физический смысл. 13.Методика расчета параметров настройки регулятора.
14.Чем вызвано использование тарировочных графиков при установке настроек регулятора?
26

Лабораторная работа № 2
Исследование релейного регулятора на базе ДИСК-250
1.Цель работы
Врезультате выполнения этой работы студенты должны практически ознакомиться с функционированием релейных АСУ, усвоить методы определения их качественных показателей. На основании результатов эксперимента сделать вывод о целесообразности области применения релейных АСУ.
2.Основные сведения
Релейные или позиционные АСУ относятся к классу нелинейных. Регулирующее воздействие релейных регуляторов изменяется скачкообразно и может принять фиксированное число значений или позиций. На практике чаще всего применяют двухпозиционные регуляторы, отличающиеся наиболее простой конструкцией. Различают идеальные (без неоднозначности) и реальные (с неоднозначностью) релейные регуляторы.
На рис. 2.1 показаны статические характеристики релейных регуляторов. Идеальный релейный регулятор при X>0 (Xт<Xз) оказывает постоянное и
максимальное регулирующее воздействие ymax (позиция “включено”). Когда регулируемая величина Xт становится больше заданного значения (X<0), регулятор снимает регулирующее воздействие yo (позиция “Отключено”).
|
|
Y |
|
ymax |
Включено |
|
X>0 |
|
|
X<0 |
|
|
|
|
y0 |
Отключено |
X |
|
|
|
|
|
Y |
|
ymax |
Включено |
|
|
|
|
|
|
|
Отключено |
|
|
|
X |
Рисунок 2.1 – Статические характеристики релейных (двухпозиционных) регуляторов: а) идеального регулятора б) реального регулятора (с
неоднозначностью ).
Смена позиций (переключения) реального релейного регулятора происходит только при изменении сигнала ошибки на величину, большую неоднозначности .
На рис. 2.2 показаны процесс регулирования и изменения регулирующего воздействия реальной релейной АСУ. Процесс релейного регулирования
27
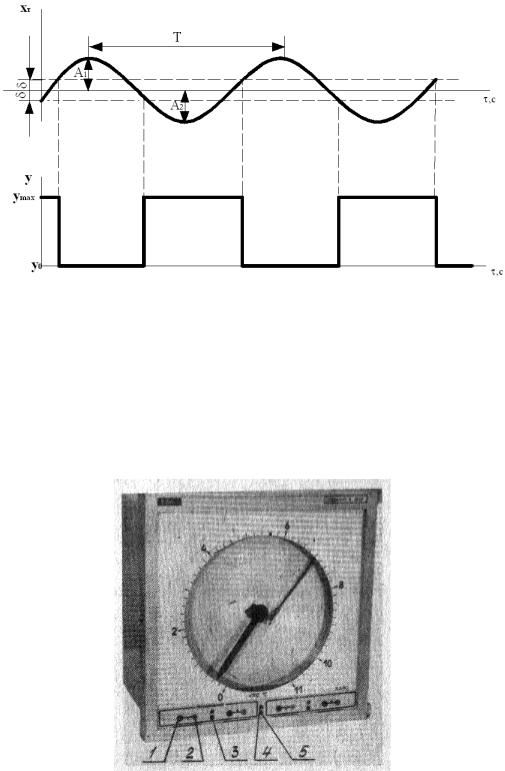
представляет собой незатухающие колебания, близкие к гармоническим. Амплитуда (А1 и А2) и период колебаний Т является показателем качества процессов релейного регулирования. Чем меньше амплитуда и больше колебаний тем выше качество процесса регулирования.
Х=Хз-Хт – сигнал ошибки – входная величина регулятора; У – регулирующие управляющее воздействие – выходная величина
регулятора Показатели качества процесса релейного регулирования легко определить
экспериментально.
Рисунок 2.2 – Типичный процесс регулирования и изменения регулирующего воздействия в реальной релейной АСУ.
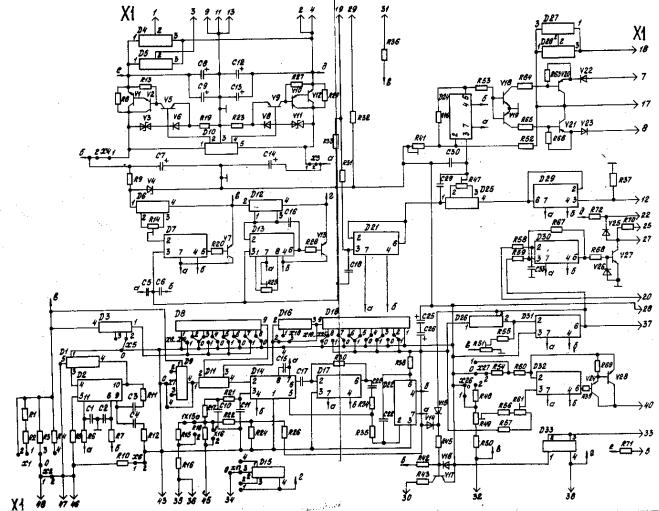
3. Описание прибора ДИСК-250 Приборы ДИСК-250 выполнены в прямоугольном корпусе, приспособленном
для утопленного щитового монтажа, корпус закрывается застекленной крышкой с установленной на ней шкалой. На крышке (рис. 3.1) также расположены:
28

Рисунок 3.1 – Внешний вид прибора ДИСК-250
–кнопки 1 и резисторы 2 установки пределов регулирования и сигнализации;
–индикаторы срабатывания устройств регулирования и сигнализации 3;
–индикатор зеленого цвета 4, сигнализирующий о включении прибора в сеть;
–индикатор красного цвета 5, сигнализирующий об аварийном состоянии прибора.
Воснову работы прибора положен принцип электромеханического уравновешивания (рис. 3.2). Выходной сигнал от датчика Д поступает на входное устройство ВхУ, где он нормализуется по нижнему пределу для удобства его дальнейшей обработки. Входное устройство содержит источник тока для питания термопреобразователей сопротивления или для питания медного резистора температурой компенсации изменения термоэдс холодных спаев термопары. С ВхУ сигнал поступает на усилитель УВС с жесткой отрицательной обратной связью, в котором он нормализуется по верхнему пределу измерения. Таким образом с выхода УВС снимается сигнал, нормализованный по нижнему и верхнему пределам измерения (при изменении входных сигналов от нижнего до верхнего пределов измерения выходной сигнал усилителя УВС изменяется в переделах от -0,5 до -8,5 В).
Рисунок 3.2 – Структурная схема измерительного прибора ДИСК-250
С предварительного усилителя ПУ УВС снимается сигнал, изменяющийся в пределах от 0 до +4 В при изменении входных сигналов от нижнего до верхнего пределов измерений.
Сигнал с реохорда Р, усиленный усилителем УР до уровня от +0,5 до +8,5 В, сравнивается на входе усилителя небаланса УН с сигналом УВС. Работа происходит следующим образом.
При изменении значения измеряемого параметра на входе усилителя УН появляется сигнал небаланса, который усиливается этим усилителем и управляет работой двигателя ДВ, который, в свою очередь, перемещает движок реохорда Р до тех пор, пока сигнал с усилителя УР не станет равным (по абсолютной величине) сигналу с усилителя УВС. Таким, образом, каждому значению
29
измеряемого параметра соответствует определенное положение движка реохорда и связанного с ним указателя прибора (на схеме не показан).
Сигнал с усилителя УВС поступает также на входы выходных устройств ВУ1
–ВУ4, которыми может быть оборудован ДИСК-250:
–ВУ1 – устройство преобразования входного сигнала в выходной электрический унифицированный сигнал 0–5 или 4–20 мА;
–ВУ2 – трехпозиционное регулирующее устройство;
–ВУ3 – устройство сигнализации о выходе измеряемого параметра за нижний допустимый предел измерения;
–ВУ4 – устройство сигнализации о выходе измеряемого параметра за верхний допустимый предел измерения.
Питание всех функциональных узлов осуществляется от источника стабилизированного питания ИП.
Принцип работы устройств сигнализации и регулирования рассмотрим на примере работы устройства сигнализации о достижении значения, меньше допустимого (сигнализации меньше или СН) (рис. 3.3).
Рисунок 3.3 – Схема электрическая принципиальная усилителя канала измерения (УКИ) прибора ДИСК-250
30