

5.2 Критерій Найквіста
Замкнена система стійка, якщо розімкнена система стійка і її АФХ не охоплює критичну точку, тобто координати (–1;j0). Оскільки в нашому випадку система має запізнювальну ланку, то наявність запізнення не впливає на стійкість розімкненої системи. В такому випадку ми будемо розглядати ПФ розімкненої системи без запізнення, тобто ПФ вигляду:
![]()
Для
побудови АФХ необхідно виділити дійсну
та уявну частину даної функції, тобто
звести її до вигляду
![]()
 Ураховуючи,
що
Ураховуючи,
що
![]() ,
а відповідно
,
а відповідно![]()
![]()
![]() .
Підставляючи всі зроблені перетворення
у нашу ПФ, будемо мати:
.
Підставляючи всі зроблені перетворення
у нашу ПФ, будемо мати:
![]()
Побудуємо годограф за допомогою MathCAD2001:
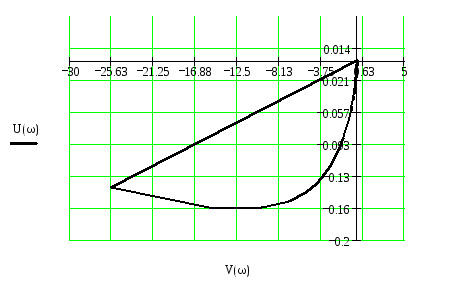
Рис. 2. Годограф неперервної частини розімкненої системи
Як бачимо, годограф побудованої ПФ не охоплює точку (-1;j0).
Висновок: система стійка за критерієм Найквіста.
Побудуємо
ЛАЧХ та ЛФЧХ і графічно визначимо запас
стійкості за фазою
![]() та по амплітудою
та по амплітудою![]() .
.
Як
бачимо з графіків, які подані на рис.
3 і 4, запас
за амплітудою:
![]() і за фазою
і за фазою![]()
Висновок: система коригування не потребує.
Будуємо ЛАЧХ і ЛФЧХ за допомогою Matlab 2000:
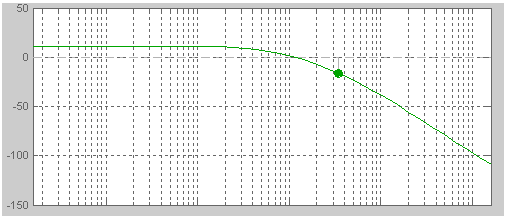
Рис. 3. ЛАЧХ розімкненої системи
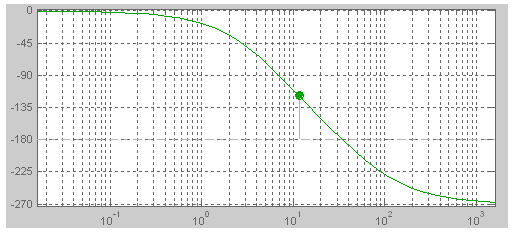
Рис. 4. ЛФЧХ розімкненої системи
6 Перехідний процес системи
Визначимо
закон зміни вихідної величини
![]() замкненої системи при ступінчастій
задаючій функції
замкненої системи при ступінчастій
задаючій функції![]() і нульових початкових умовах.
і нульових початкових умовах.
ПФ замкненої системи буде:
![]()
Визначимо корені знаменника. Для цього використаємо програму MathCAD2000.
Отже,
![]()
![]()
![]()
![]()
![]()
 Оскільки
р
– оператор, то для переходу до оригіналу
скористуємося теоремою розгортки:
Оскільки
р
– оператор, то для переходу до оригіналу
скористуємося теоремою розгортки:
![]() де
де
![]() - чисельник ПФ розімкненої системи;
- чисельник ПФ розімкненої системи;
![]() - знаменник ПФ розімкненої системи.
- знаменник ПФ розімкненої системи.
Тоді оригінал може бути знайдений як
![]()
![]() Далі,
виконуючи відповідні розрахунки,
отримаємо функцію перехідного процесу
в нашій системі.
Далі,
виконуючи відповідні розрахунки,
отримаємо функцію перехідного процесу
в нашій системі.
За допомогою програми MathCAD2001 побудуємо графік перехідного процесу:

Рис. 5. Перехідний процес системи
7 Визначення якісних показників перехідного процесу
Оцінимо
різницю між максимальним значенням
![]() перехідної характеристики та її
встановленим значенням
перехідної характеристики та її
встановленим значенням![]() ,
тобто визначимо пере регулювання.
,
тобто визначимо пере регулювання.
![]()
Допущене
значення відхилення вибираємо
![]() ,
тоді час регулювання
,
тоді час регулювання![]() .
.
8 Швидкісна похибка слідкуючої системи
У
слідкуючи системах з астатизмом першого
порядку швидкісна похибка з’являється
з постійною швидкістю. Максимальна
швидкість обертання об’єкта керування
![]() .
.
Тоді швидкісна похибка буде дорівнювати:
![]()
9 Інструментальна похибка слідкуючої системи
 Інструментальна
похибка слідкуючої системи зумовлена
нелінійностями статичних характеристик
її функціональних елементів. Основними
джерелами її появи в цифроаналоговій
системі є: потенціометр зворотного
зв’язку, АЦП і знижувальний редуктор.
Інструментальна
похибка слідкуючої системи зумовлена
нелінійностями статичних характеристик
її функціональних елементів. Основними
джерелами її появи в цифроаналоговій
системі є: потенціометр зворотного
зв’язку, АЦП і знижувальний редуктор.
Максимальна інструментальна похибка:
![]()
Середньоквадратична інструментальна похибка:
![]()
Література:
Попович М.Г.,Ковальчук О.В. Теорія автоматичного керування:Підручник.-К.:Либідь,2007.-656с.
Галай М.В. Теорія автоматичного керування.:неперервні та дискретні системи.:навчальний посібник.-Полтава;ПНТУ,2005-454с.
Галай М.В.Импульсні,цифрові та релейні системи.
Галай В.М. Теорія цифрових систем автоматичного керування.:Навчальний посібник.-Полтава:ПНТУ,2009.-131с.