

laboratornyi-praktikum-elektroprivod
.pdf19
ным возбуждением?
6.Как влияют на вид механической характеристики электродвигателя с параллельным возбуждением напряжение и сопротивление якоря, магнитный поток, сопротивление динамического торможения?
7.Что такое время выбега и от чего оно зависит?
8.Каковы способы регулирования угловой скорости электродвигателя с параллельным возбуждением?
9.Какие основные факторы риска существуют при выполнении лабораторной работы?
10.Какова категория опасности помещения лаборатории 122эн?
Лабораторная работа № 2 МЕХАНИЧЕСКИЕ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
Цель работы: экспериментальное получение механических и электромеханических характеристик электродвигателя постоянного тока последовательного возбуждения в основных режимах работы при различных способах регулирования скорости вращения.
Программа работы
1.Теоретическая подготовка к работе.
2.Сборка электрической схемы.
3.Снятие механических и электромеханических характеристик электродвигателя постоянного тока последовательного возбуждения.
3.1.В двигательном режиме при отсутствии добавочного резистора в цепи якоря и одном значении его сопротивления (RP1 = 0, RP1 = 10,8 Ом).
3.2.В двигательном режиме и режиме противовключения при сопротивлении резистора в цепи якоря, равном 24 Ом (RP1 = 24 Ом).
3.3.В режиме динамического торможения с самовозбуждением при двух значениях сопротивления в цепи якоря (RP1 = 5 Ом, RP1 = 11,5 Ом).
3.4.В двигательном режиме при шунтировании обмотки возбуждения резистором с двумя значениями сопротивления (R1 = 0,4 Ом и R1 = 0,8 Ом) и от-
20
сутствии добавочного резистора в цепи якоря (RP1 = 0).
3.5.В двигательном режиме при шунтировании обмотки якоря резистором
ссопротивлением 44 Ом (R2 = 44 Ом) при двух значениях сопротивления резистора в цепи якоря (RP1 = 0 и RP1 = 10,8 Ом).
4. Обработка опытных данных.
5. Составление отчета о работе.
Описание лабораторной установки
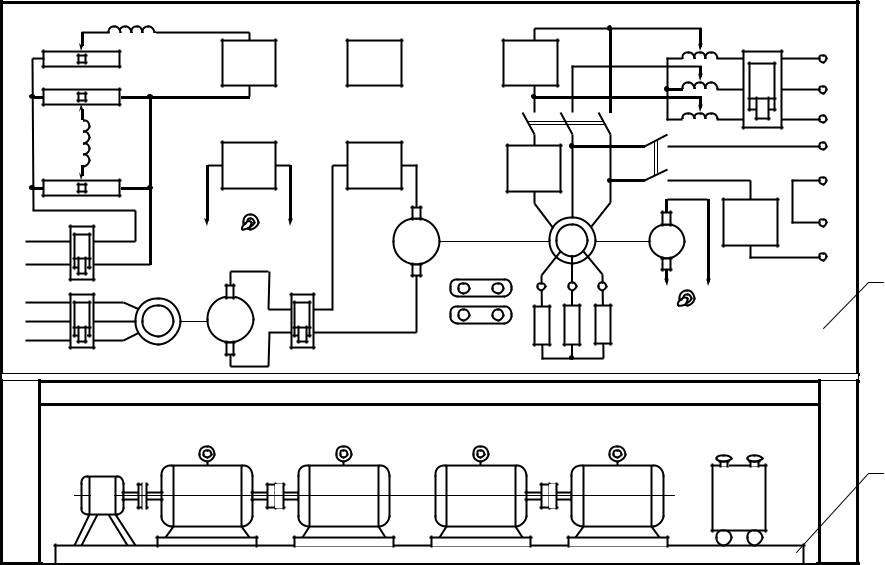
Лабораторная установка представляет собой стенд для размещения измерительных приборов, коммутирующей аппаратуры и регулировочных реостатов. Под стендом находятся соединенные по валу испытуемый электродвигатель М1, нагрузочная машина М2 и тахогенератор BR, клеммы якорей и обмоток возбуждения которых вынесены на лицевую панель стенда. Здесь же приведена электрическая принципиальная схема испытаний.
Паспортные данные электродвигателей:
• испытуемая машина М1 – тип ПН 28,5, зав. № 271805, PН =2,8 кВт, длительный режим, U Н =220 В, I Н =15,6 А, nН =1500 об/мин, ОВ – компаундная, масса 88 кг;
•нагрузочная машина М2 – аналогичная, зав. № 363625;
•тахогенератор BR – тип ТГ-041, зав. № 2206, nН =3000 об/мин, возбуж-
дение 50 В, якорное – 55 В.
Методические указания к выполнению работы
1. Теоретическая (домашняя) подготовка предполагает знакомство по методическим указаниям (см. общий раздел) и рекомендуемой литературе с особенностями электродвигателей постоянного тока последовательного возбуждения, видом их механических и электромеханических характеристик, возможными режимами работы и способами регулирования их скорости. В результате подготовки и для получения допуска к проведению работ необходимо усвоить методику проведения экспериментов (последовательность действий при получении и фиксации каждой характеристики), представить вид графиков всех характеристик, подлежащих опытному получению по программе работ, с указанием режимов работы и способов регулирования скорости испытуемой электрической
21
машины, а также таблицы для записи замеров.
2. Собрать электрическую схему, представленную на рис. 8, в следующем порядке:
а) в цепь якоря нагрузочной машины М2 включить резистор RP2, обеспечивающий необходимый диапазон изменения нагрузки на валу испытуемой машины М1;
б) в цепь возбуждения М2 включить резистор RP3, сопротивление которого равно 50–100 % сопротивления обмотки возбуждения машины. Сопротивление обмотки возбуждения рассчитывать по методике, приведенной в общем разделе указаний;
в) при выборе всех резисторов, включаемых в схему, необходимо учитывать их сопротивление и допустимый ток. В качестве резисторов на ток более 5 А использовать нагрузочные тумбы и ящики сопротивлений.
После проверки преподавателем собранной схемы следует выполнить ряд предварительных операций:
– установить номинальный поток возбуждения нагрузочной машины М2, который при выполнении всей программы работ следует поддерживать постоян-
ным ( I В = I В Н = const );
– проверить направление вращения машин и установить их взаимно противоположное вращение. Такую проверку осуществляют кратковременным поочередным включением машин в сеть с введением в их якорные цепи полного сопротивления резисторов RP1 и RP2 соответственно. (Это позволит выполнить всю программу работ без дополнительной смены направления вращения машин).
Предостережения:
1.Во всех режимах работы токи в якорях электродвигателей не должны превышать I ЯН .
2.При выполнении пунктов программы, где сопротивление резистора RP1 должно быть равно нулю (RP1 = 0), запуск М1 осуществляют путем предварительного введения пускового реостата (можно использовать резистор RP1 с последующим его шунтированием переключателем SA3).
3.Скорость вращения М1 не должна превышать двукратной номинальной
ω≤ 2 ωH .

|
|
22 |
|
|
=220 В |
|
|
~220 В |
|
|
QF1 |
|
|
ТV |
|
|
|
|
UZ |
2 |
1 |
2 |
1 |
|
SA3 |
SA1 |
SA2 |
|
|
RP1 |
РA1 |
РA2 |
РА3 |
LBR |
R2 |
RP2 |
|
|
|
|
М1 |
М2 |
|
BR |
LM1 |
|
|
LM2 |
|
|
|
|
РV |
|
R1 |
|
RP3 |
|
|
|
|
|
||
а)
1 А 2 А 2 А
220 В |
220 |
120 |
175 |
|
|||
|
Ом |
Ом |
Ом |
5 А 10 А 20 А 20 А
44 |
24 |
11,5 |
10,8 |
Ом |
Ом |
Ом |
Ом |
б)
Рис. 8. Электрическая принципиальная схема испытаний (а) и реостата RP1 (б)
3. Снять механические и электромеханические характеристики испытуемой машины М1. Опытные данные и расчетные величины характеристик (с общими условиями проведения эксперимента) занести в табл. 6. Фиксировать показания приборов (опытные точки) необходимо во всем диапазоне допустимых значений нагрузки и скорости электродвигателей М1 и М2.
3.1. Для снятия характеристик в двигательном режиме испытуемую машину М1 следует включить в сеть (переключатель SA1 – в положение 1). Нагрузочную машину М2 установить в режим динамического торможения (переключатель SA2 включить на резистор RP2, т.е. в положение 2). Сопротивление рези-
23
стора RP2 предварительно установить максимальным. Последовательно нагружая М2 с помощью резистора RP2, т.е. уменьшая его сопротивление, фиксировать ток якоря I Я М1 испытуемой машины по показаниям амперметра РА1, ток
якоря нагрузочной машины I Я М 2 по показаниям амперметра РА2 и напряжение
на якоре тахогенератора BR с помощью вольтметра PV.
Естественные характеристики снимать при RP1 = 0 (см. предостережения!), а искусственные – при RP1 = 10,8 Ом.
|
|
|
|
|
|
|
|
|
Таблица 6 |
|
|
Механические и электромеханические характеристики |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
Условия |
|
|
|
Режим работы . . . |
|
|
|
|||
работы |
RP1 = . . . Ом, |
|
R1 = . . . Ом, |
R2 = . . . Ом |
||||||
|
|
О п ы т н ы е з н а ч е н и я |
|
|
|
|||||
I Я М1 , А |
|
|
|
|
|
|
|
|
|
|
I Я М 2 , А |
|
|
|
|
|
|
|
|
|
|
U BR , B |
|
|
|
|
|
|
|
|
|
|
|
|
Р а с ч е т н ы е з н а ч е н и я |
|
|
|
|||||
M, H м |
|
|
|
|
|
|
|
|
|
|
ω, рад/с |
|
|
|
|
|
|
|
|
|
|
3.2.Для снятия характеристик в двигательном режиме и режиме противовключения испытуемую машину М1 оставить включенной в сеть. Нагрузочную машину М2 также включить в сеть (переключатель SA2 – в положение 1). Вращающие моменты машин должны быть в этом случае направлены в противоположные стороны. Запуск нагрузочной машины М2 осуществить при максимальном сопротивлении резистора RP2. Разгоняя М2 с помощью резистора RP2, т.е. уменьшая его сопротивление, фиксировать (см. п. 3.1) токи обеих машин и напряжение тахогенератора. Характеристики получать при RP1 = 24 Ом.
Следует обратить внимание на момент перехода М1 из двигательного режима работы в режим противовключения (момент остановки). При этом, удерживая агрегат в заторможенном состоянии, поменять полярность включения вольтметра PV
изафиксировать диапазон изменения токов стопорения электродвигателей М1 и М2 путем изменения сопротивления резистора RP2.
3.3.Для снятия характеристик в режиме динамического торможения с самовозбуждением испытуемую машину М1 отключить от сети и включить на тре-
24
буемое по программе работы сопротивление резистора RP1 (переключатель SA1
– в положение 2). Нагрузочную машину М2 перевести в двигательный режим, т.е. включить в сеть (переключатель SA2 – в положение 1) при максимальном значении RP2. Уменьшая сопротивление резистора RP2, делать те же замеры.
3.4.Для снятия характеристик при шунтировании обмотки возбуждения порядок операций тот же, что указан при снятии характеристик в двигательном режиме (см. п. 3.1). Шунтирующий резистор R1 устанавливать при отключенном питании установки только на время проведения данного опыта.
3.5.Для снятия характеристик при шунтировании обмотки якоря порядок операций тот же, что указан при снятии характеристик в двигательном режиме (см. п. 3.1). Шунтирующий резистор R2 устанавливать при отключенном питании установки только на время проведения данного опыта. Кроме того, следует определить отношение E ω , необходимое для расчета момента при построении
ω , необходимое для расчета момента при построении
механических характеристик. Если в процессе выполнения всей работы поток возбуждения нагрузочной машины М2 оставался постоянным, то E ω =const, и
ω =const, и
определение этого отношения производится однократным замером скорости ω и ЭДС Е на якоре нагрузочной машины с помощью переносного вольтметра. При этом якорная цепь машины М2 должна быть разомкнута (переключатель РА2 в среднем положении), а испытуемая машина М1 должна работать в двигательном режиме с произвольной установившейся скоростью.
4. По опытным данным следует рассчитать угловую скорость ω, рад/с, испытуемого электродвигателя и момент М, Н м, на его валу. Для этого показания вольтметра тахогенератора U BR перевести в значения угловой скорости по формуле (5). Значения момента рассчитать по формуле (6) после определения отношения E ω по опытным значениям тока якоря нагрузочной машины I Я М 2 . Сле-
ω по опытным значениям тока якоря нагрузочной машины I Я М 2 . Сле-
дует помнить, что найденные подобным образом значения моментов испытуемой машины М1 являются моментами на её валу, а не электромагнитными моментами этой машины. Результаты расчетов занести в табл. 6. По опытным и расчетным данным построить электромеханические ω = f (I Я ) и механические ω =ϕ(M ) характеристики испытуемого электродвигателя.
25
Содержание отчета
Отчет оформляется в соответствии с требованиями [6, 7] и содержит:
–наименование, цель и программу работы;
–принципиальную электрическую схему испытаний;
–таблицы замеров и вычислений;
–семейства электромеханических и механических характеристик в заданных по программе режимах работы испытуемого электродвигателя;
–выводы, содержащие краткий анализ полученных результатов и способов регулирования угловой скорости машин постоянного тока с последовательным возбуждением.
Контрольные вопросы
1.Какой режим работы электродвигателя (здесь и далее – постоянного тока с последовательным возбуждением) является недопустимым по условиям безопасности?
2.Какие существуют режимы работы электродвигателей?
3.Какие способы регулирования скорости электродвигателей применяются на практике?
4.Чем отличается электромагнитный момент двигателя от его момента на валу (найденного экспериментально) и как это можно учесть при построении механической характеристики?
5.При каком условии возможно получить режим динамического торможения с самовозбуждением?
6.Чему равно отношение E ω и каков его физический смысл?
ω и каков его физический смысл?
7.Что такое статическая устойчивость работы электропривода? Всегда ли она обеспечивается в данной лабораторной установке?
Лабораторная работа № 3 МЕХАНИЧЕСКИЕ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ
Цель работы: опытное изучение электромеханических ω = f (I Я ) и механических ω =ϕ(М ) характеристик и способов регулирования угловой скорости электродвигателя с фазным ротором в различных режимах работы.
26
Программа работы
1.Теоретическая подготовка к работе.
2.Сборка схемы внешних соединений.
3.Снятие механических и электромеханических характеристик асинхронного электродвигателя с фазным ротором в различных режимах работы.
3.1.В рекуперативном и двигательном режимах и режиме противовключения при пониженном напряжении на статоре (U1 = 90 B) и сопротивлении рези-
стора в цепи ротора, равном половине номинального ( RP1 =0,5 R2ном).
3.2. В двигательном |
режиме при номинальном напряжении на статоре |
(U1 = 220 B ) и различных |
сопротивлениях в цепи ротора ( RP1 =0,5 R2ном; |
RP1 =0,7 R2ном; RP1 = R2ном).
3.3. В режиме динамического торможения при двух значениях сопротивления резистора в цепи ротора ( RP1 = (0,5 ÷1,0)R2ном) и двух значениях тока ста-
тора ( I1 = (0,3 ÷0,5) I1 ном ).
4.Снятие зависимости времени выбега испытуемой машины от сопротивления динамического торможения.
5.Обработка опытных данных.
6.Составление отчета о работе.
Описание лабораторной установки
Лабораторная установка, внешний вид которой представлен на рис. 9, является стационарной и состоит из неподвижного стенда со столом 1 и стального основания 2, на котором смонтированы испытуемый асинхронный электродвигатель с фазным ротором М1, вспомогательные (нагрузочные) электродвигатели постоянного тока М2 и М3 и гонный электродвигатель М4. Здесь же установлен трехфазный автотрансформатор Т, позволяющий регулировать напряжение U1 на статоре электродвигателя М1 в пределах 0–220 В. Электродвигатели М1 и М2 соединены соосно с помощью упругой муфты. К валу машины М2 с помощью упругой муфты присоединен тахогенератор BR. Машины М3 и М4 также соединены соосно.
Основные технические данные электродвигателей и автотрансформатора приведены в табл. 7 и 8.
LM2
RP3 |
PA3 |
RP5 |
|
LM3 |
PV3 |
|
|
|
RP4 |
|
|
|
||
|
|
SA2 |
|
|
|
+ |
QF2 |
1 (2) |
3 (4) |
|
|
|
|
||||
– |
|
|
QF3 |
|
|
|
QF4 |
|
|
||
А |
|
1 |
2 |
||
M4 |
M3 |
||||
В |
3 |
4 |
|||
С |
|
|
|
|
|
|
|
|
|
Т |
QF1 |
~220 В |
PV2 |
PV1 |
|
|
|
|
|
А |
|
|
|
|
|
|
|
В |
|
|
|
KM1 |
|
|
|
С |
|
|
|
|
KM2 |
|
+ |
|
PA2 |
PA1 |
|
|
=220 В |
|||
|
|
|
|
|
|
|
– |
|
|
|
|
|
|
PA4 |
11 |
M2 |
М1 |
M1 |
|
BR |
|
|
к RР2 |
|
|
|
|
|
|
12 |
|
|
ПУСК СТОП |
|
|
|
|
|
|
|
|
|
SA1 |
|
1 |
||
|
a |
b |
c |
|
|||
|
300 |
150 |
|
|
|||
|
|
|
|
|
|
||
|
ПУСК СТОП |
|
RР1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Динамическое |
|
|
|
|
|
|
|
торможение |
|
|
|
|
|
|
2
ВR |
М1 |
M2 |
M3 |
M4 |
Т |
|
|
|
|
|
Рис. 9. Внешний вид лабораторной установки
28
Таблица 7 Основные технические данные асинхронных электродвигателей
и автотрансформатора
Наименование |
|
Тип |
|
|
|
|
|
|
|
|
|
|
Технические |
данные |
|
|
|
|
|
|
|||||||||||
электро- |
|
|
|
|
U1 , |
|
|
U 2 , |
|
I1Н , |
I2Н, |
|
|
η, |
|
cosϕ |
|
Pном, |
|
nном, |
|||||||||||
оборудования |
|
|
|
|
|
|
|
В |
|
|
В |
|
|
А |
А |
|
о.е. |
|
|
|
|
кВт |
|
|
об/мин |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Испытуемый |
|
АК-51/4 |
|
|
380 |
|
|
84 |
|
|
7,6 |
22,5 |
|
0,78 |
|
0,82 |
|
2,8 |
|
|
|
1370 |
|
||||||||
двигатель М1 |
|
|
|
220 |
|
|
|
|
11,5 |
|
|
|
|
|
|
|
|||||||||||||||
Асинхронный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
коротко- |
|
Р-42/4 |
|
|
|
220 |
|
|
– |
|
|
– |
|
0,86 |
|
0,87 |
|
5,8 |
|
|
|
1445 |
|
||||||||
замкнутый |
|
|
|
|
380 |
|
|
|
|
11,8 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
двигатель М4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Автотранс- |
|
РНТ-220-12 |
|
127 |
|
|
0– |
|
|
– |
– |
|
|
– |
|
– |
|
– |
|
|
|
– |
|||||||||
форматор |
|
|
220 |
|
|
220 |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 8 |
|||||
Основные технические данные электродвигателей постоянного тока |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Наимено- |
|
|
|
|
|
|
|
|
|
|
|
|
Технические данные |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вание |
|
|
Тип |
|
U |
|
|
|
, |
|
I |
|
, |
|
η, |
P , |
|
nном, |
|
|
|
|
|
|
|
|
|
||||
электро- |
|
|
|
|
|
ном |
|
|
|
|
ном |
|
|
ном |
|
об/ми |
|
|
Примечание |
||||||||||||
оборудования |
|
|
|
|
|
В |
|
|
|
|
|
А |
|
|
о.е. |
кВт |
|
н |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Двигатель |
|
|
П-42 |
|
340 |
|
|
15,7 |
|
|
0,94 |
4,5 |
|
|
1800 |
|
|
|
– |
|
|
|
|||||||||
постоянного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
тока М2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Двигатель |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
постоянного |
|
|
ПН-45 |
|
220 |
|
|
38,4 |
|
|
0,97 |
4,2 |
|
|
1285 |
|
|
|
– |
|
|
|
|||||||||
тока М3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kBR =17,3 |
об/мин |
|
|||||
Тахо- |
|
ТМГ-30 |
|
230 |
|
|
0,057 |
|
– |
– |
|
4000 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
В |
|||||||||||||||||||
генератор |
|
|
|
|
|
|
|
kBR =1,82 |
рад |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с В |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Схема внешних соединений лабораторной установки показана на рис. 10, электрическая принципиальная схема – на рис. 11. Питание лабораторной установки электроэнергией осуществляется от сети трехфазного напряжения ~220 B, 50 Гц и от сети постоянного напряжения =220 В.