

laboratornyi-praktikum-elektroprivod
.pdf11
Описание лабораторной установки
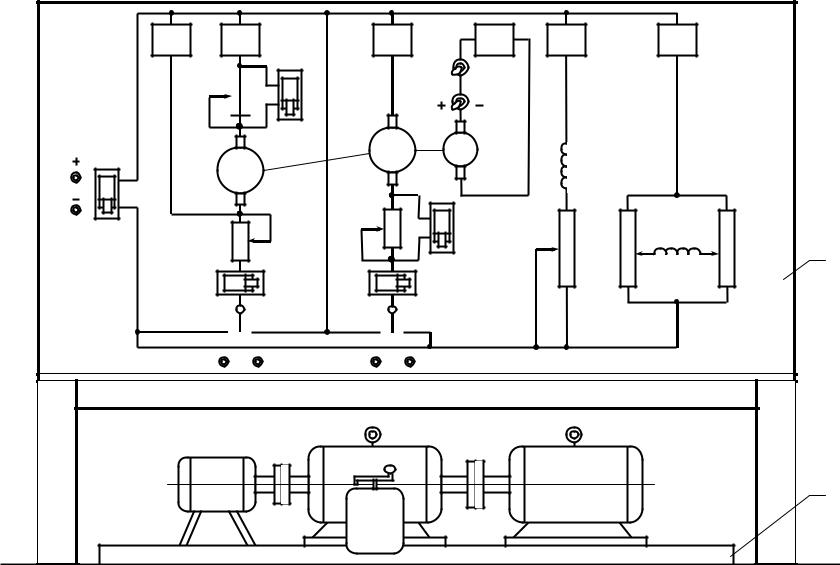
Лабораторная установка, внешний вид которой представлен на рис. 5, является стационарной и состоит из неподвижного стенда 1 со столом и основания 2, на котором смонтированы испытуемая машина М1 и нагрузочная машина М2, соосно соединенные валами с помощью муфты. К валу машины М1 присоединен тахогенератор BR, служащий для измерения угловой скорости. Здесь же установлен пусковой реостат RPпуск .
На лицевой стороне стенда расположены:
–автоматический выключатель QF1, служащий для подачи постоянного напряжения (=220 В) на установку;
–автоматические выключатели QF2–QF5 и переключатели SA1–SA4, служащие для коммутации силовых и измерительных цепей;
–амперметры РA1–РA4 для измерения токов в цепях якоря и возбуждения машин М1 и М2;
−вольтметры PV1 для измерения напряжения на якоре машины М1 и PV2 для измерения напряжения на тахогенераторе BR;
−ручки резисторов RP3 и RP4–RP5;
−клеммы "+" и "–" для подачи постоянного напряжения =220 В на автомат QF1 от сетевого автомата № 18;
−клеммы для подсоединения силовых резисторов RP1 и RP2 в якорные цепи машин М1 и М2 соответственно.
Резисторы RP1 и RP2 набраны из ящиков сопротивлений, помещенных в
закрытые металлические кожухи, и являются передвижными. На них закреплены клеммные панели и коммутирующие устройства.
Основные технические характеристики электродвигателей лабораторной установки сведены в табл. 1.
|
|
|
|
|
Таблица 1 |
|
Основные технические характеристики электродвигателей |
|
|
||||
|
|
|
|
|
|
|
Наименование |
Тип |
U ном , |
I ном, |
Pном, |
|
nном, |
электрооборудования |
В |
А |
кВт |
|
об/мин |
|
|
|
|||||
Испытуемая машина М1 |
SIMENS |
220 |
20 |
5 |
|
1125 |
Нагрузочная машина М2 |
ПН–85 |
230 |
25 |
6 |
|
1460 |
Тахогенератор BR |
ЭТ–4 |
110 |
0,12 |
0,013 |
|
1900 |
|
|
|
|
|
|
|
PV1 |
PA1 |
QF3 |
RPпуск 

QF1
M1
PA2 |
SA3 |
PV2 |
|
|
|
||
|
75 В |
|
150 В |
|
SA4 |
|
|
M2 |
|
BR |
|
|
|
RР1 |
RР2 |
QF2 |
|
|
|
||
|
|
|
|
|
|
|
QF4 |
|
QF5 |
1 |
2 |
SA1 |
1 |
2 SA2 |
|
|
к RP1 |
|
к RP2 |
PA3 |
PA4 |
LM1 |
|
|
|
RP4 |
RP5 |
RP3 |
LM2 |
1 |
|
М1 |
M2 |
ВR |
|
2
RPпуск
Рис. 5. Внешний вид лабораторной установки
12
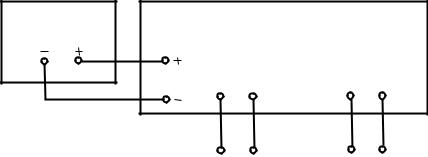
Схема внешних соединений стенда представлена на рис. 6.
Сетевой |
Стенд лабораторной работы |
||
автомат № 18 |
|||
|
|
||
|
=220 В к RP1 |
к RP2 |
|
Нагрузочный |
|
Нагрузочный |
резистор |
|
резистор |
RP1 |
|
RP2 |
Рис. 6. Схема внешних соединений стенда
Электрическая принципиальная схема лабораторной установки приведена на рис. 7. Режимы работы электрических машин задают автоматами QF2–QF5 и переключателями SA1, SA2. Изменение направления тока в обмотке возбуждения LM2 нагрузочной машины М2 и, следовательно, направления электромагнитного момента этой машины осуществляется с помощью реостатного моста RP4–RP5.
Резистор RP2 выполняет функции пускового и нагрузочного резистора машины М2. Резисторами RP3 и (RP4–RP5) осуществляют ослабление поля машин М1 и М2 соответственно. Для подачи полного напряжения сети на машину М2 после её пуска резистор RP2 шунтируют автоматическим выключателем
QF2.
Угловую скорость агрегата замеряют вольтметром PV2, включенным на выводы тахогенератора BR. Если при замерах стрелка вольтметра отклоняется влево от нуля, то следует переключить тумблер SA4 из положения "+" в положение "–" (или наоборот). Второй тумблер SA3 служит для переключения пределов измерения вольтметра PV2 (75 В или 150 В).
Автоматический выключатель QF1 предназначен для подачи напряжения на стенд и защиты цепей от коротких замыканий.
Методические указания к выполнению работы
1. Теоретическая подготовка к работе предполагает изучение студентом по рекомендуемой литературе механических и электромеханических характеристик электродвигателя постоянного тока с параллельным возбуждением, воз-
13
можных режимов его работы и способов регулирования скорости. Теоретическая

PV1 |
PA1 |
PA2 |
PV2 |
RРпуск
 QF3
QF3
QF1
M1 |
M2 |
BR |
=220 В
RР1 |
RР2 |
|
QF2 |
Rдоб
PA3 PA4
75 В 150 В
SA3
+–
SA4
 LM1
LM1
RP4 RP5
RP3 |
LM2 |
|
QF4 |
|
QF5 |
|
SA1 |
|
SA2 |
1 |
2 |
1 |
2 |
Рис. 7. Электрическая принципиальная схема испытаний (контакты переключателей SA1–SA2 показаны в нулевом положении)
14
подготовка требует от студента ознакомления с электрической принципиальной схемой лабораторной установки, применяемым электрооборудованием, с приборами и методами измерения, усвоения последовательности переключений в схеме для получения необходимого режима работы исследуемой машины, расчета сопротивления противовключения. Только выполнение этих условий позволит студенту получить допуск к проведению работы.
Значение сопротивления противовключения RPПР рассчитывают из условия допустимого тока якоря в режиме противовключения
RPПР = UI+Я E − rЯ ,
где E – ЭДС испытуемой машины (принимают равной 0,4 U Н ; режим противовключения осуществляется на пониженной угловой скорости ω =0,4 ωН );
U = 220 В – напряжение сети;
I Я – допустимый ток якоря испытуемой машины (принимают равным номинальному току I Н );
rЯ =0,5 Ом – сопротивление якоря испытуемой машины.
Допускают отклонение сопротивления резистора RP1 от расчетного значения RPПР на ±10 %.
2.Ознакомиться с электрооборудованием на стенде и собрать схему внешних соединений установки (см. рис. 6).
3.Снять электромеханические и механические характеристики испытуемой машины М1. Опытные и расчетные данные по характеристикам занести в табл. 2.
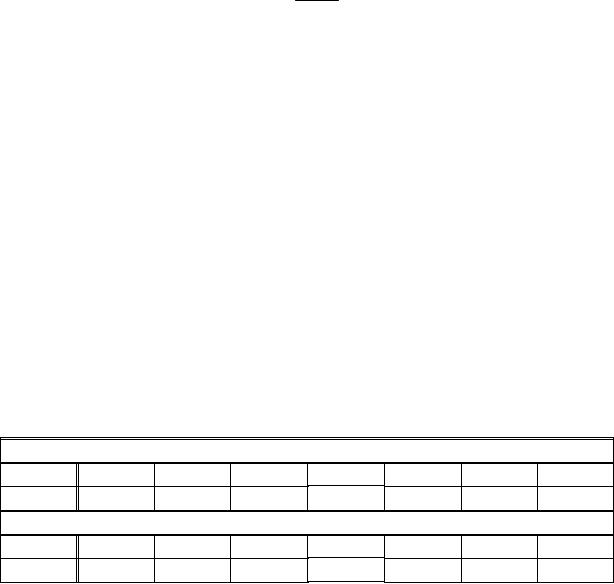
Таблица 2
Механические и электромеханические характеристики
Опытные данные
I Я М1 , А
U BR , B
Расчетные данные
M, H м
ω, рад/с
3.1. Снять характеристики испытуемой машины в рекуперативном и двигательном режимах и режиме противовключения:
15
а) подготовить схему испытаний. Для этого переключатель SA1 установить в положение 1, а переключатель SA2 – в положение 2. Рукоятку резистора RPпуск установить в положение пуска. В этом положении сопротивление рези-
стора RPпуск равно бесконечности (разрыв цепи якоря М1). Включить автомати-
ческий выключатель QF1 на стенде. Если соблюдена необходимая полярность включения, то стрелки амперметров PA3 и PA4 отклоняются вправо. Ток возбуждения машин М1 и М2 установить номинальным: номинальный ток возбуждения машины М1 равен 0,8 А, а машины М2 – 1 А. Во время испытаний обмотки возбуждения машин нагреваются и их сопротивление увеличивается. Поэтому ток возбуждения поддерживают постоянным реостатами RP3 и RP4–RP5. Произвести поочередный пуск машин: испытуемой – пусковым реостатом RPпуск , а
нагрузочной машины – включением коммутирующих аппаратов нагрузочного резистора RP2. Убедиться в одинаковом направлении вращения машин по показаниям вольтметра PV2;
б) для снятия характеристик испытуемой машины в рекуперативном режиме включить машину М1, а затем машину М2. Увеличивать угловую скорость агрегата включением автоматического выключателя QF2 и последующим ослаблением поля машины М2. Сначала по отклонению амперметра PA1 будет видно, что машина М1 работает в двигательном режиме. Затем, по мере увеличения угловой скорости агрегата, показания амперметра PA1 уменьшаются до нуля. Машина М1 будет работать с угловой скоростью идеального холостого хода. При дальнейшем увеличении угловой скорости агрегата отклонение стрелки прибора PA1 будет обратным (по сравнению с двигательным режимом). В этом режиме ток увеличивать до 3–5 А. Машина М1 работает в рекуперативном режиме и отдает электрическую энергию в сеть. Нагрузочная машина М2 при этом работает в двигательном режиме с ослаблением поля, отдавая механическую энергию машине М1. По окончании замеров отключить выключатель QF1;
в) для снятия характеристик в двигательном режиме и в режиме противовключения произвести следующие переключения. Переключатель SA1 оставить в положении 1. Переключатель SA2 установить в положение 2 для работы машины М2 в двигательном режиме. Ток возбуждения машины М2 установить номинальным. Направление вращения машины М2 должно быть противоположным направлению вращения машины М1. Для этого изменить направление тока
16
возбуждения в обмотке возбуждения LM2. Включить автоматический выключатель QF1, и запустить машину М1 с помощью RPпуск . Включением коммути-
рующих аппаратов пускового реостата RP2 постепенно уменьшать его сопротивление. Ток якоря машины М1 начинает расти. Угловая скорость агрегата уменьшается до нуля, а затем он начинает вращаться в обратную сторону. При переходе показаний вольтметра PV2 через нуль переключить тумблер SA4. Записать показания приборов РА1 и PV2 с учетом направления вращения агрегата. Последнюю точку замеров в режиме противовключения снять при номинальном токе якоря машины М1. После проведения замеров все аппараты привести в исходное состояние.
Предостережение! Во всех режимах работы ток якоря машин не должен превышать I Н .
3.2. Снять семейство электромеханических и механических характеристик машины М1, работающей в двигательном режиме, по трем задаваемым вариантам, выбираемым из табл. 3.
Для снятия характеристик переключатели SA1 и SA2 установить в положение 1. Включить QF1 и разогнать машину М1. Машина М2 начинает работать в режиме динамического торможения. Постепенно уменьшать сопротивление RP2 и производить записи показаний приборов РА1 и PV2. Для каждой характеристики должно быть получено 4–5 опытных точек. Опытные данные по каждому варианту записывать в таблицы типа табл. 2. По окончании замеров все коммутирующие аппараты привести в исходное состояние.
Таблица 3
Варианты заданий двигательного режима
Номер варианта |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
RP1, Ом |
0,5 RPПР |
0 |
RPПР |
0,5 RPПР |
0 |
RPПР |
0 |
I В М1 , А |
0,8 |
0,8 |
0,8 |
0,7 |
0,7 |
0,7 |
0,6 |
3.3. Снять семейство электромеханических и механических характеристик машины М1, работающей в режиме динамического торможения, по трем задаваемым вариантам, выбираемым из табл. 4.
17
|
|
|
|
|
Таблица 4 |
Варианты заданий режима динамического торможения |
|
||||
|
|
|
|
|
|
Номер варианта |
1 |
2 |
3 |
4 |
5 |
RP1, Ом |
RPПР |
0,5 RPПР |
0 |
RPПР |
0,5 RPПР |
I В М1 , А |
0,8 |
0,8 |
0,8 |
0,6 |
0,6 |
Для снятия характеристик переключатели SA1 и SA2 установить в положение 2. Вывести резистор RPпуск . Включить QF1. Постепенно уменьшать сопро-
тивление RP2, т.е. производить пуск и регулирование угловой скорости машин М1 и М2. Записывать показания приборов РА1 и PV2. Для каждой характеристики должно быть получено 4–5 опытных точек. Опытные данные по каждому варианту записывать в таблицы типа табл. 2. По окончании замеров отключить QF1 и все коммутирующие аппараты привести в начальное состояние.
4. Снять зависимость времени выбега испытуемой машины М1, работающей в режиме динамического торможения, от значения сопротивления резистора RP1. Данные по характеристике времени выбега заносить в табл. 5.
|
Опытные данные характеристики времени выбега |
Таблица 5 |
||||
|
|
|||||
|
|
|
|
|
|
|
RP1, Ом |
|
∞ |
RPПР |
0,5 RPПР |
0,25 RPПР |
0 |
tвыб, с |
|
|
|
|
|
|
Ток возбуждения машины М1 установить номинальным.
Для снятия характеристики времени выбега переключатели SA1 и SA2 установить в положение 2. Автоматические выключатели QF2–QF4 поставить в отключенное состояние, а QF5 – во включенное. Включить QF1. Запустить машину М2 при помощи пускового резистора RP2. Включить QF2 и QF3, шунтируя резисторы RP2 и RPпуск соответственно. Затем одновременно отключить
QF5, включить QF4 и засечь время торможения машины М1 до её полной остановки, контролируемой по вращающимся частям агрегата визуально.
5. Вычислить значения CФ = Е ω , необходимые для расчета электромагнитного момента по формуле (6) и построения механических характеристик (3). Экспериментальное определение отношения Е
ω , необходимые для расчета электромагнитного момента по формуле (6) и построения механических характеристик (3). Экспериментальное определение отношения Е ω производить следующим образом. Установить переключатель SA1 в нулевое положение, а SA2 – в положение 2.
ω производить следующим образом. Установить переключатель SA1 в нулевое положение, а SA2 – в положение 2.
18
Включить автоматический выключатель QF3. Включить QF1 и запустить машину М2 при помощи резистора RP2. Записать показания вольтметра PV2. Устанавливать поочередно ток возбуждения испытуемой машины 0,8; 0,7; 0,6 А и записывать значения ЭДС по показаниям вольтметра PV1. После выполнения работы отключить QF1, сетевой автомат и разобрать схему внешних соединений.
6. По опытным данным следует рассчитать угловую скорость ω, рад/с, и момент М, Н м, испытуемого электродвигателя. Для этого показания вольтметра тахогенератора U BR перевести в значения угловой скорости по формуле (5), а момент рассчитать по формуле (6). Результаты расчетов занести в табл. 2–4. По опытным и расчетным данным построить электромеханические (2) и механические (3) характеристики испытуемого электродвигателя в различных режимах работы и характеристику времени выбега.
Содержание отчета
Отчет оформляется в соответствии с требованиями [6, 7] и должен содержать:
–наименование, цель и программу работы;
–принципиальную электрическую схему испытаний;
–таблицы замеров и вычислений, постоянные величины, расчетные формулы;
–семейства электромеханических и механических характеристик в различных режимах работы испытуемой машины;
–характеристику времени выбега;
–выводы, содержащие краткий анализ полученных результатов и характеристику способов регулирования угловой скорости машин постоянного тока с независимым (параллельным) возбуждением.
Контрольные вопросы
1.Что называется электромеханической характеристикой электродвигателя?
2.Что называется механической характеристикой электродвигателя?
3.Что такое рекуперативный режим работы электродвигателя с параллельным возбуждением?
4.Что такое режим противовключения электродвигателя с параллельным возбуждением?
5.Что такое режим динамического торможения электродвигателя с параллель-