

12.3 Нелинейные системы
Существуют динамические явления, которые не могут быть описаны линейными дифференциальными уравнениями с постоянными коэффициентами. Нелинейное поведение реальных систем обуславливается различными причинами. Некоторые из них:
ограничение сигнала в устройствах управления;
наличие действующих сил, обусловленных сухим трением;
различные виды реле (с зоной нечувствительности, гистерезисом и т. д.);
клапаны (зоны нечувствительности, насыщение);
нелинейные деформации механических пружин;
аэродинамическое сопротивление;
двигатели постоянного тока с последовательно включенной обмоткой возбуждения (момент - функция квадрата тока роторной цепи);
двигатели переменного тока.
В реальных условиях все сигналы ограничены. Примером ограничения сигнала может служить обратная связь по току в приводах постоянного тока. Ток двигателя должен быть ограничен, иначе двигатель сгорит. Соответственно, система управления двигателем не может быть линейной, особенно при больших ускорениях и моментах нагрузки.
Датчики систем управления также могут иметь нелинейные характеристики. Такая зависимость может быть линейна при небольших значениях измеряемых сигналов, и существенно нелинейной - для больших. Обычно для нелинейных систем аналитическое решение не может быть получено. Для их решения используются численные методы, что вполне приемлемо в большинстве случаев.
Нелинейные системы можно описать в следующем виде:
 (12.1)
(12.1)
где определены n переменных состояния и r входов, или в векторной форме
dx/dt = f(x,u)
В состоянии равновесия производные dxi/dt равны нулю. Пусть точке равновесия х* соответствует постоянный управляющий сигнал u*, тогда условие равновесия
f(x*,u*)=0
Это уравнение эквивалентно n скалярным уравнениям, и может иметь несколько решений, каждое из которых соответствует некоторой точке равновесия.
12.4 Численное моделирование динамических систем в задачах управления
Для численного решения нелинейных дифференциальных уравнений применяются различные методы, в основе которых - аппроксимация производных по времени разностными уравнениями.
x(t + h)~ x(t) + h f(x(t),u(t)).
Если известны начальные условия х(0), то можно рассчитать значения x(h), x(2h), x(3h), ... , x(nh), которые являются приближениями точного решения в соответствующие моменты времени.
Для решения систем дифференциальных уравнений в процессорных системах управления должны быть определены начальные условия и величина шага интегрирования. Чем меньше шаг интегрирования, тем меньше (формально) погрешность аппроксимации при численном интегрировании. Однако слишком маленький шаг ведет к неоправданно большому времени вычислений (которое также зависит от сложности вычислений, типа уравнений, числа переменных и производительности процессора). Поскольку слишком большое значение шага вызывает проблемы сходимости решений, важно определить компромиссное значение. Эффект неправильно выбранного шага может оказаться очень существенным, особенно если в моделируемой системе взаимодействуют быстрые и медленные динамические процессы.
Существует много методов численного интегрирования, каждый из которых имеет свои достоинства и недостатки. Наибольшее распространение получили методы Рунге-Кутта.
Метод Рунге-Кутта 4-го порядка :
xi+1 = xi + h(k1 + 2k2 + 2k3 + k4)/6,
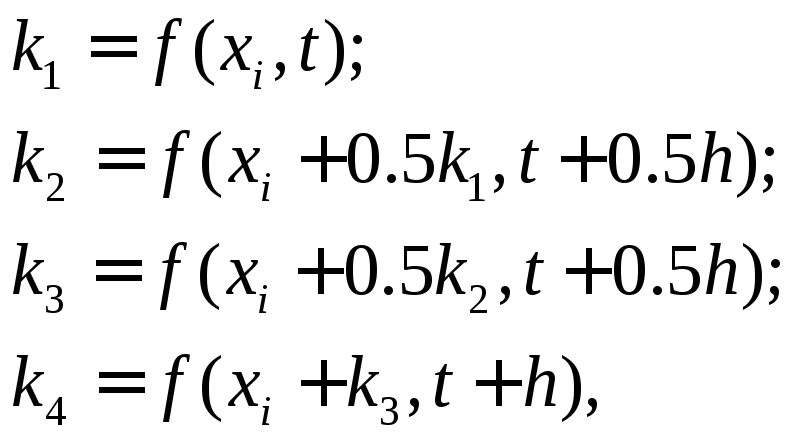
Большинство методов интегрирования допускают варьируемую величину шага, которая выбирается автоматически, чтобы удовлетворить заданной величине допустимой погрешности. Однако в этом случае невозможно обеспечить получение решения за одинаковые интервалы времени, что важно для систем управления, работающих в реальном времени.