

12.2. Описание управляемых систем во временной и частной областях
Как правило, моделирование сложной системы представляет собой процесс, требующий экспериментальной проверки. При физическом подходе модель формируется исходя из физических соотношений и уравнений баланса. При другом способе построения динамической модели в технический процесс вносятся определенные возмущения, а затем выполняется анализ серий входных и выходных данных. Такой анализ называется идентификацией параметров (parameter identification) [1,2]. Если он выполняется в реальном масштабе времени, т.е. со скоростью, сопоставимой со скоростью протекания процесса, то такая процедура называется рекурсивной оценкой (recursive estimation) [3].
На практике обычно применяется комбинирование физического моделирования и идентификации параметров. При более глубоком изучении свойств процесса становится проще получить его точное динамическое описание. Однако даже тщательно разработанные модели, основанные на физическом подходе, требуют экспериментальной проверки -идентификации.
Моделирование систем, работа которых основана на последовательности дискретных событий, принципиально отличается от моделирования динамических систем. Для управления температурой, уровнем жидкости или давлением на основе дискретной обратной связи модель процесса фактически не нужна (пример - работа шахтного водоотлива). В этом случае значение контролируемого параметра поддерживается на заданном уровне с определенной точностью с помощью включения и выключения исполнительного механизма. При таком бинарном управлении уже на стадии анализа системы должны быть рассмотрены все возможные нештатные и аварийные ситуации. Что будет, если выйдет из строя датчик или отключится питание? Разработка полного перечня всех возможных событий в системе может быть достаточно сложной задачей. Нужно сказать, что для горных машин этот тип систем управления в настоящее время наиболее распространен.
Физический подход к моделированию динамических систем основан на уравнениях баланса сил, массы, энергии и моментов. Математической основой динамической модели любой механической системы являются законы Ньютона. При этом вводится некоторая система отсчета, относительно которой определяются положение, скорость и ускорение звеньев механизма. Для механической системы (рис. 12.1), характерной для многих технических устройств, обладающих упруго-диссипативными свойствами, уравнение состояния для этой системы с учетом сил демпфирования и инерции запишется в следующем виде:

Рисунок 12.1 Расчетная схема кинематического механизма с упругой связью и демпфированием
 .
.
Данное уравнение является математической моделью поведения подвижной массы при силовом воздействии на нее. Оно может использоваться для описания многих механизмов. Качественно решение уравнения зависит от относительной величины коэффициентов демпфирования b и жесткости с. При малом коэффициенте демпфирования уравнение описывает колебательный процесс, а при больших значениях b колебания отсутствуют.
Часто масса или момент инерции звеньев может быть непостоянной величиной, например, при работе промышленного робота или другого рычажного механизма, и нужно учитывать его зависимость от времени и фазовых координат объекта. Момент сопротивления нагрузки также зависит от многих факторов. Силы трения (сухое трение) вызывают момент сопротивления, который не зависит от скорости, а только от направления вращения и действует всегда против него. В некоторых системах присутствует вязкое трение с моментом сопротивления, характеризующимся коэффициентом Стокса (кинематическая вязкость).
Первое систематическое изучение устойчивости систем с обратной связью выполнил Джеймс С. Максвелл. В 1868 году Максвелл вывел дифференциальные уравнения маятникового регулятора, линеаризовал их в окрестности точки равновесия и показал, что устойчивость системы зависит от корней ее характеристического уравнения. В 1932 году американец шведского происхождения Гарри Найквист опубликовал свою знаменитую теорему о том, как определить устойчивость по форме частотной характеристики. Критерий Найквиста в момент своего появления считался революционным. В те времена военные считали эту теорему настолько важной, что США держали ее в тайне до конца Второй мировой войны.
В большинстве случаев технические процессы сложны и нелинейны, что не позволяет исследовать их классическими методами теории автоматического управления. В 1950-е годы некоторые исследователи вернулись к описанию систем посредством обыкновенных дифференциальных уравнений для задач управления процессами. Такое направление стимулировалось американской и советской космическими программами, поскольку обыкновенные дифференциальные уравнения представляют собой естественную форму описания динамики космических кораблей. Применение цифровых вычислительных машин потребовало новых математических методов решения задач моделирования. Инженеры работали с дифференциальными уравнениями состояния, а не с частотными или характеристическими уравнениями. Появились новые фундаментальные понятия - управляемость, наблюдаемость и обратная связь по переменным состояния. Стало возможным описывать и исследовать сложные системы в терминах обыкновенных дифференциальных уравнений.
Дифференциальные уравнения, описывающие физический процесс, необходимо преобразовать к системе обыкновенных дифференциальных уравнений первого порядка. В этом случае говорят, что получено описание в виде уравнений состояния в пространстве состояний (state-space form). В таком виде эти уравнения можно решать численными методами. При этом достаточно четко прослеживается связь между внутренними переменными и внешними входным и выходным сигналами. Для представленного выше примера

В общем случае уравнения баланса нелинейны и, как правило, связаны друг с другом. Таким образом, описание динамики процесса может представлять собой набор нелинейных, связанных между собой дифференциальных уравнений первого порядка для баланса энергии, общей массы, массы компонентов, сил и моментов.
Уравнения состояния представляют собой практичный и удобный способ описания динамических систем. Состоянием называется набор всех переменных - так называемых переменных состояния (state variables), производные первого порядка которых входят в уравнения описания динамической системы. (координата и скорость массы в рассматриваемом примере). Концепция уравнений состояния имеет фундаментальное значение. Если известны текущее состояние системы (переменные состояния) и входные воздействия, то можно предсказать ее дальнейшее поведение. При этом предысторию, т.е. как было достигнуто текущее состояние, знать не нужно. Другими словами, текущее (начальное) состояние - это минимальное количество информации о системе, которое необходимо, чтобы предсказать ее будущее поведение.
Состояние х можно представить как вектор-столбец, компоненты которого - переменные состояния.
X = (x1, x2, … xn )T
Непосредственно измерить все переменные состояния можно в редких случаях (существуют внутренние переменные, за которыми не удается следить с помощью датчиков). Выходные величины (измеряемые параметры) образуют вектор у
Y = (y1, y2, … ym )T
Поэтому описание в пространстве состояний называют также внутренним описанием (internal description).
В общем случае число датчиков, связанных с техническим процессом, меньше числа переменных состояния. Поэтому вычисление переменных состояния х по текущим значениям у выходных (измеряемых) параметров - нетривиальная задача.
На любую техническую систему влияют входные сигналы двух типов - сигналы, которыми можно управлять, и сигналы, которыми управлять невозможно. Сигналы первого типа называются управляющими сигналами или переменными управления, и составляют вектор u,
u = (u1, u2, … uk )T
Входные сигналы второго типа могут влиять на систему, но не поддаются управлению. Величина этих сигналов отражает влияние внешней среды на систему, например изменение нагрузки, вызванное температурой, радиацией, магнитным воздействием и т.п. Все эти сигналы обозначим вектором v.
v = (v1, v2, … vr )T
Целью системы управления является вычисление на основе имеющихся измерений у таких управляющих сигналов u, чтобы, несмотря на влияние возмущении v, техническая система выполняла поставленные задачи. Управляемую систему можно представить в виде структуры, на которой показаны управляющие силы, силы возмущения и выходные переменные (рис.12.2).
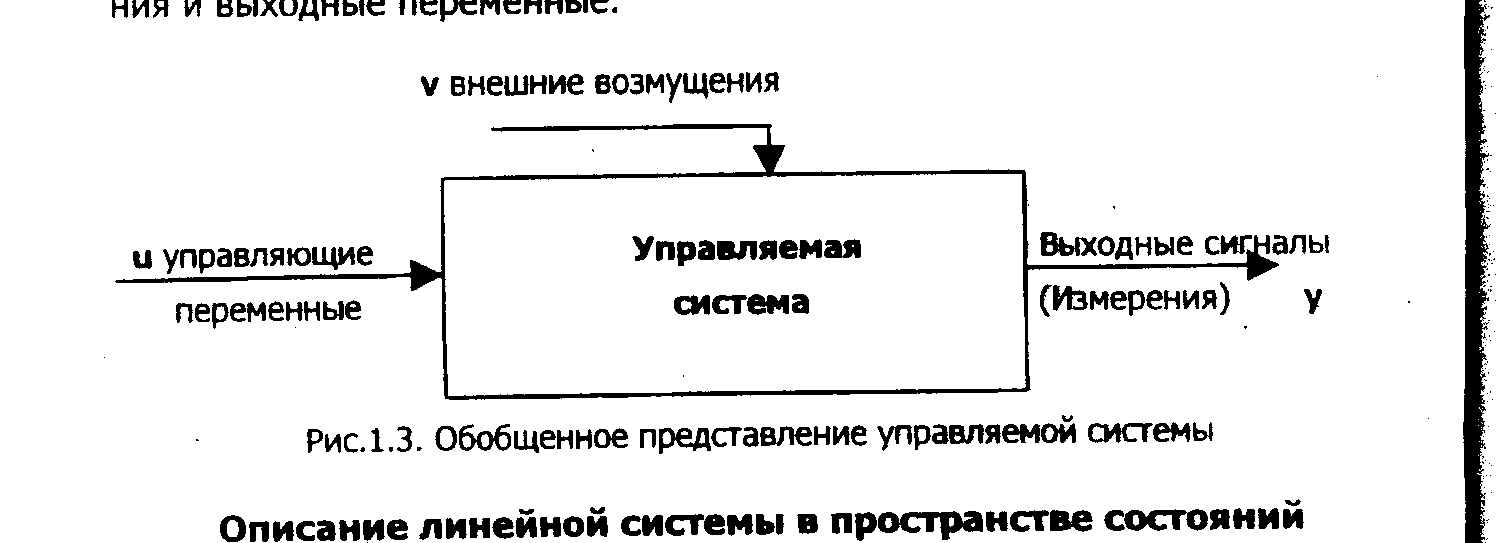
Рисунок 12.2. -Обобщенное представление управляемой системы