

2. Елементи спеціальної теорії відносності
Простір і час. Простір і час у класичній механіці. Перетворення Галілея.
Принцип відносності Галілея. Постулати спеціальної теорії відносності. Перетворення Лоренца. Відносність поняття одночасності подій. Відносність інтервалів. Лоренцеве скорочення довжини. Релятивістський закон додавання швидкостей. Інтервал між подіями і його інваріантність по відношенню до вибору інерціальної системи відліку як прояв і взаємозв'язок простору і часу.
Елементи релятивістської динаміки. Імпульс і маса в релятивістській динаміці. Основний закон релятивістської динаміки матеріальної точки. Взаємозв'язок маси й енергії. Релятивістське вираження для кінетичної енергії. Співвідношення між повною енергією і імпульсом.
Частина 1 фізичні основи механіки
§1. Кінематика матеріальної точки
Механіка – це вчення про найпростіші форми руху матерії, які полягають у переміщенні тіл одних відносно інших. Будь-який механічний рух можна розкласти на два компонента – поступальний і обертальний.
Матеріальна точка – це тіло, розмірами якого можна знехтувати в умовах даної задачі. Абсолютно тверде тіло – це тіло, деформаціями якого можна знехтувати в умовах даної задачі.
Механіка поділяється на три розділи – кінематику, динаміку і статику. Кінематика вивчає рух без урахування сил, що діють на тіло. Динаміка вивчає рух з урахуванням сил, що діють на тіло. Статика вивчає рівновагу тіл під дією прикладених до нього сил.
Швидкість.
Положення матеріальної точки у просторі
можна задати за допомогою радіуса-вектора
![]() ,
проведеного з початку координат у
дану
точку
(див.
рис.1). При цьому
,
проведеного з початку координат у
дану
точку
(див.
рис.1). При цьому
rx=x; ry=y; rz=z.

Рис. 1.1
Позначимо
![]() – вектор елементарного (тобто дуже
малого) переміщення за елементарний
проміжок
часу
t,
S
– елементарний шлях за проміжок
t.
Вектор переміщення
– вектор елементарного (тобто дуже
малого) переміщення за елементарний
проміжок
часу
t,
S
– елементарний шлях за проміжок
t.
Вектор переміщення
![]() направлений з початкової точки у момент
часуt
у кінцеву в момент часу t+
t,
а шлях
S
– це довжина траєкторії.
направлений з початкової точки у момент
часуt
у кінцеву в момент часу t+
t,
а шлях
S
– це довжина траєкторії.
Середня
швидкість ![]() . (1.1)
. (1.1)
Миттєва
швидкість ![]()
![]() . (1.2)
. (1.2)
Тобто вектор миттєвої швидкості дорівнює першій похідній від радіуса-вектора за часом і направлений по дотичній до траєкторії. Одиницею швидкості в СІ є (м/с).
Проекції швидкості на координатні осі визначаються за формулами
![]()
Модуль миттєвої швидкості дорівнює першій похідній від шляху за часом
![]() . (1.3)
. (1.3)
При
рівномірному русі тіло проходить за
рівні проміжки часу
![]() рівні шляхи
рівні шляхи![]() ,
тому
,
тому![]() =сonst
і
визначається за формулою
=сonst
і
визначається за формулою
![]() =S/t. (1.4)
=S/t. (1.4)
Обчислення
пройденого шляху.
Щоб визначити пройдений шлях при
нерівномірному русі, потрібно розбити
весь шлях на елементарні ділянки
![]() ,
настільки малі, що швидкості
,
настільки малі, що швидкості![]() на кожному елементарному шляху можна
вважати незмінними. Тоді скориставшись
формулою (1.4), отримаємо
на кожному елементарному шляху можна
вважати незмінними. Тоді скориставшись
формулою (1.4), отримаємо
![]() . (1.5)
. (1.5)
Формула
(1.5) тим точніша, чим менші проміжки часу
![]() .
Строгий знак рівності у (1.5) можна
поставити тільки під знаком границі
при
.
Строгий знак рівності у (1.5) можна
поставити тільки під знаком границі
при![]() :
:
![]() =
= . (1.6)
. (1.6)
Таким
чином, щоб обчислити пройдений шлях від
моменту часу
![]() до моменту часу
до моменту часу![]() ,
потрібно швидкість проінтегрувати за
часом у вказаних межах. На координатній
площині (V,
t)
пройдений шлях дорівнює площі
криволінійної трапеції (див. рис.1.2).
,
потрібно швидкість проінтегрувати за
часом у вказаних межах. На координатній
площині (V,
t)
пройдений шлях дорівнює площі
криволінійної трапеції (див. рис.1.2).
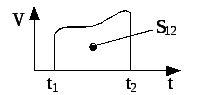
Рис.1.2
Прискорення.
Якщо за час t
приріст швидкості дорівнює ![]() ,
то середнє прискорення визначається
формулою
,
то середнє прискорення визначається
формулою
![]() . (1.7)
. (1.7)
Миттєве прискорення – це перша похідна за часом від швидкості
![]() . (1.8)
. (1.8)
Прискорення
характеризує зміну вектора швидкості
![]() в одиницю часу. Одиницею прискорення в
системі СІ є (м/с2
).
При криволінійному русі вектор прискорення
в одиницю часу. Одиницею прискорення в
системі СІ є (м/с2
).
При криволінійному русі вектор прискорення
![]() розкладають на дві складові – тангенціальну
складову
розкладають на дві складові – тангенціальну
складову![]() ,
яка направлена вздовж дотичної, і
нормальну складову
,
яка направлена вздовж дотичної, і
нормальну складову![]() ,
яка направлена вздовж перпендикуляра
до дотичної ( рис.1. 3):
,
яка направлена вздовж перпендикуляра
до дотичної ( рис.1. 3):
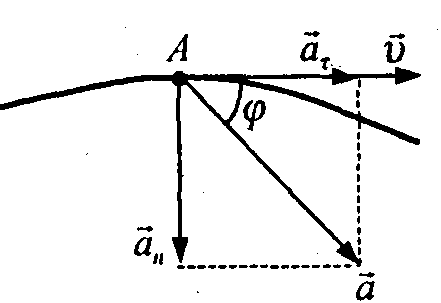
Рис.1. 3
![]() ,
(1.9)
,
(1.9)
![]() ;
(1.10)
;
(1.10)
![]() ;
(1.11)
;
(1.11)
R
– радіус кривизни траєкторії у даній
точці. Тангенціальна складова
(тангенціальне прискорення)
![]() визначає зміну швидкості в одиницю часу
за величиною, а нормальна складова
визначає зміну швидкості в одиницю часу
за величиною, а нормальна складова![]() (нормальне прискорення) – за напрямком.
Тоді повне прискорення
(нормальне прискорення) – за напрямком.
Тоді повне прискорення![]()
Обчислення
швидкості, якщо відоме прискорення.
Для рівнозмінного (![]() )
руху за рівні проміжки часу
)
руху за рівні проміжки часу![]() швидкість змінюється на однакові
прирости.
Тому
для цього руху прискорення
швидкість змінюється на однакові
прирости.
Тому
для цього руху прискорення
![]() , (1.12)
, (1.12)
де
![]() 0
– початкова швидкість, тобто швидкість
при
0
– початкова швидкість, тобто швидкість
при
![]() .
.
При
![]() =const
формула (1.6) переходить у формулу для
рівнозмінного руху
=const
формула (1.6) переходить у формулу для
рівнозмінного руху
![]() ; (1.13)
; (1.13)
або в
скалярному вигляді, спроектувавши
вектори
![]() і
і![]() на
на![]() 0
, маємо
0
, маємо
![]() =
=
![]() 0
a t, (1.14)
0
a t, (1.14)
де знак плюс відповідає рівноприскореному рухові, а знак мінус – рівносповільненому.
Підставляючи (1.14) у (1.6), отримаємо формулу для визначення шляху при рівнозмінному русі
![]() .(1.15)
.(1.15)
Таким чином, формули
![]() ,
, ![]() ,
,
![]() ,
, ![]() .
.
є найбільш загальними кінематичними формулами, які справедливі для будь-якого руху.