

МСС телеконспект лекций ТКС
.pdfРаздел 1 Метрология Лекция 4 Обработка результатов измерений
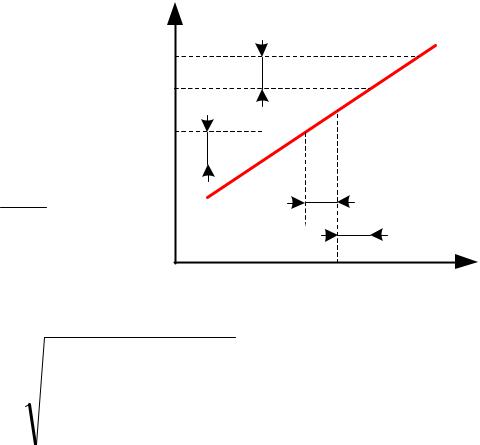
Пример 4: Переменная составляющая несинусоидального напряжения определяется по показаниям электромагнитного и магнитоэлектрического вольтметров: 50 В и 40 В соответственно. Найдите результат измерения при условиях:
Uн1 = 100 B, K1 = 0,5; Uн2 = 50 В, K2 = 0,5.
Решение:
U~~ 
 U 2 U02
U 2 U02 
 502 402 30 B;
502 402 30 B;
|
Umax |
K1Uн1 |
0,5100 |
0,5 В; |
|
|
U0max |
K2Uн2 |
|
0,5 50 0,25 В; |
|||||||||||||||||||
|
100% |
100 |
|
|
|
|
|
|
|
|
100% |
|
|
100% |
|
|
|||||||||||||
|
|
|
|
|
|
U~ |
|
2 |
|
U~ |
|
|
|
|
|
2 |
|
|
U 2 2 |
|
U |
2 |
2 |
|
|
||||
|
Р |
|
|
|
|
|
|
U |
|
max |
|
|
|
|
|
Umax |
|
0 |
U0max |
|
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
2 |
|||||||||||||||||||
|
|
|
|
|
Umax |
|
U0 |
0 |
|
|
|
|
|
U |
U |
|
|
||||||||||||
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
||||||||||
|
|
|
|
(50 0,5)2 (40 0,25)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
0,9 В; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
502 402 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
U~ 30,0 0,9 В. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Результат измерения : |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Раздел 1 Метрология Лекция 4 Обработка результатов измерений
4.6 Оценивание погрешности испытаний
Пусть X = f (Y).
∆зад – погрешность задания значения Y
Погрешность испытаний Х
X
исп изм y Y
X |
изм |
изм |
зад |
зад |
Y |
При Х = ƒ (X1, X2, …, Xm) наибольшая погрешность испытаний
|
|
m |
X |
2 |
|
исп |
изм |
|
|
||
|
|||||
|
Xi |
i |
|||
|
|
i 1 |
|
Метрология, стандартизация и сертификация в телекоммуникационных системах и сетях
Лекция 5 Электромеханические измерительные приборы
1.Физические основы работы.
2.Магнитоэлектрические приборы.
3.Магнитоэлектрические приборы с
измерительными преобразователями электрических величин.

Раздел 1 Метрология Лекция 5 Электромеханические измерительные приборы
5.1 Физические основы работы
Измерительные приборы:
●аналоговые;
●цифровые;
●виртуальные.
Аналоговые измерительные приборы:
●электромеханические приборы;
●приборы сравнения;
●электронные приборы.
Электромеханические приборы ► преобразуют электромагнитную энергию входного сигнала в механическую энергию перемещения подвижной части прибора.
Структурная схема электромеханического прибора:
X |
Измерительная |
|
Измерительный |
|
Отсчётное |
|
цепь |
|
механизм |
|
устройство |
|
|
|
|
|
|
Раздел 1 Метрология Лекция 5 Электромеханические измерительные приборы
Измерительная цепь ► предварительное преобразование входного сигнала (масштабное или функциональное).
Измерительный механизм ► преобразует электромагнитную энергию в механическую.
Состоит из:
●неподвижной части;
●подвижной части.
Для выполнения измерений на подвижную часть должны действовать:
●вращающий момент (Мвр );
●противодействующий момент (Мпр ).
По способу создания вращающего момента
►системы электромеханических приборов:
●магнитоэлектрическая (МЭ);
●электромагнитная (ЭМ);
●электродинамическая (ЭД);
●ферродинамическая (ФД);
●электростатическая (ЭС);
●индукционная (И).
Раздел 1 Метрология Лекция 5 Электромеханические измерительные приборы
По способу создания противодействующего момента:
●с механическим Мпр (спиральные пружины, упругие растяжки, подвес);
●с электрическим Мпр (логометры).
Уравнение движения подвижной части прибора:
|
|
|
|
|
|
|
Мвр = Ми + Му + Мпр , |
||||
Ми |
J |
d2α |
– момент сил инерции; |
|
|||||||
|
dt2 |
|
|||||||||
Му |
P |
d |
|
– момент успокоения; |
|
||||||
dt |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d2α |
|
dα |
|
|
|
|
|
|
|
|
J |
|
P |
|
Dα M |
вр. |
|
|
|
|
|
dt2 |
|
|||||
|
|
|
|
|
|
|
|
dt |
|
||
Раздел 1 Метрология Лекция 5 Электромеханические измерительные приборы
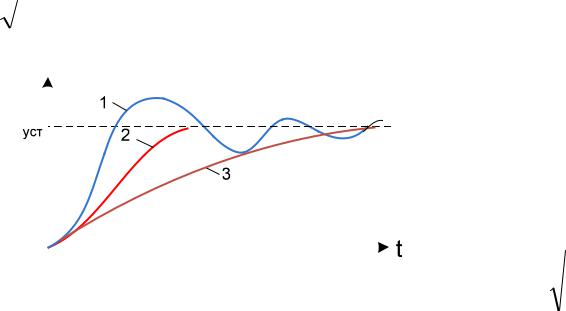
Характер движения подвижной части зависит от степени успокоения:
β |
P |
|
; |
< 1 |
► колебательное движение (кривая 1); |
|||||
|
|
|
|
> 1 |
► апериодическое движение (кривая 3); |
|||||
2 |
|
|
|
|||||||
JD |
||||||||||
|
|
|
|
|
|
= 1 |
► ускоренное (критическое) движение (кривая 2). |
|||
|
|
α |
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Частота собственных колебаний подвижной части: |
f0 |
|
1 |
|
D |
|
|
2 |
|
J . |
|||
|
|
|||||
У электромеханических приборов f0 < 10 Гц и < 1 (колебательное движение)
Для быстрого затухания колебаний ► магнитоиндукционные успокоители.
Поворот подвижной части соответствует:
–среднему значению Мвр при fX > f0 ;
–мгновенному значению Мвр при fX < f0.
Раздел 1 Метрология Лекция 5 Электромеханические измерительные приборы
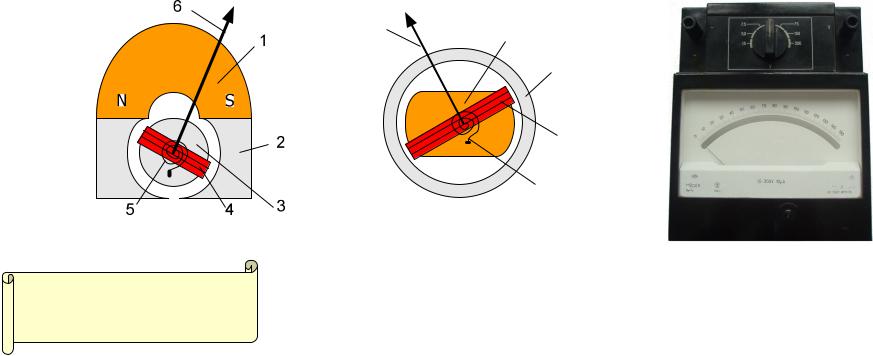
5.2 Магнитоэлектрические приборы
Принцип действия ► взаимодействие тока катушки с магнитным полем постоянного магнита.
Конструктивные исполнения:
●с подвижной катушкой и неподвижным магнитом;
●с подвижным магнитом и неподвижной катушкой.
|
6 |
1 |
|
|
|
|
|
2 |
|
N |
|
|
S |
4 |
|
|
5 |
с внешним магнитом |
с внутренним магнитом |
|
|
Bsw I SI |
– уравнение преобразования |
|
|
|
|
|
|
|
|
магнитоэлектрических приборов |
|
D |
||
|
|
||

Раздел 1 Метрология Лекция 5 Электромеханические измерительные приборы
Магнитоэлектрический логометр
|
|
I1 |
|
|
|
|
f |
|
– уравнение преобразования |
||
|
|||||
|
|
I2 |
|
|
|
|
|
|
логометра |
||
|
|
|
|
Свойства магнитоэлектрических приборов:
+высокая точность;
+высокая чувствительность;
+малое потребление энергии;
¬непригодность для измерения переменного тока;
¬малая перегрузочная способность.
Область применения: А , V , Г , Ω в цепях постоянного тока.
Расширение пределов измерения:
●по I ► шунты;
●по U ► добавочные сопротивления, делители.
Раздел 1 Метрология Лекция 5 Электромеханические измерительные приборы
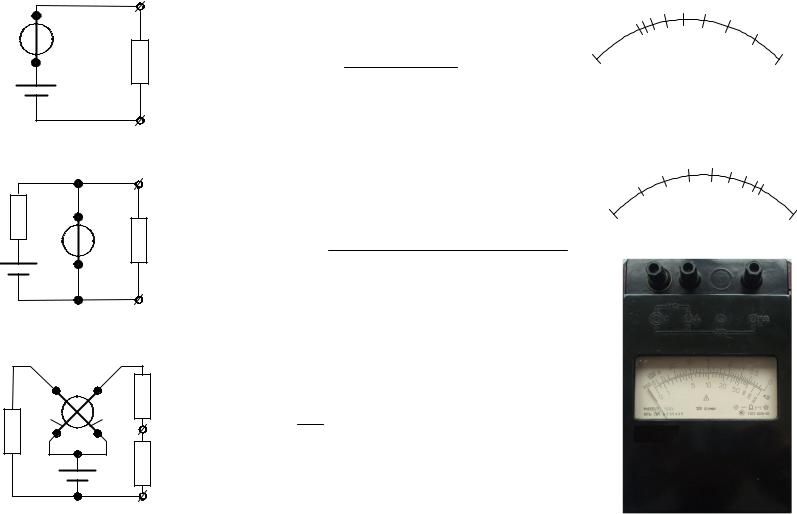
Магнитоэлектрические омметры
Последовательная схема (для измерения больших R)
ИМ |
|
Е |
|
0 |
Rx |
|
|
||
SI S |
|
Шкала обратная |
||
Е |
|
RИМ RX |
|
|
Параллельная схема (для измерения малых R) |
|
|
||
Rо ИМ |
|
ЕRХ |
0 |
|
|
|
Шкала прямая |
||
Rx |
SI S |
|
||
E |
|
RRX RО(RИМ RX ) |
|
|
Логометрическая схема
|
|
ИМ |
|
|
|
|
|
|
|
2 |
Rо |
|
|
|
I1 |
|
|
R |
1 |
|
f |
|
|
|
||
н |
|
|
I2 |
|
||||
|
|
Rx |
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2им |
RО |
RX |
|
||
f |
|
|
|||||
R |
|
|
|||||
|
R |
Н |
|
|
|||
|
|
1им |
|
|
|
||