

Измер консп_лекций - 2013
.pdf
|
70 |
компонентов. Наиболее просто концентрация определяется |
бинарной |
системе, состоящей из двух компонентов. В этом случае остаточно определить относительное содержание х одного вещества, так как относительное содержание другого равно 1-х. Для определения концентрации х используется зависимость физических свойств, таких, как плотность, вязкость, электропроводность, теплопроводность и др., от состава данной бинарной системы. При однозначной зависимости прибор, измеряющий это свойство, может быть проградуирован в единицах концентрации.
Любое физическое свойство а зависит не только от концентрации х, но и от внешних условий и, в частности, от температуры Θ анализируемой смеси: а  х, .
х, .
Вследствие этого результат измерения концентрации также зависит от температуры: x f a, .
Для исключения температурной зависимости нужно либо стабилизировать температуру, либо вводить поправку на температурную погрешность, применять специальные схемы и методы измерения.
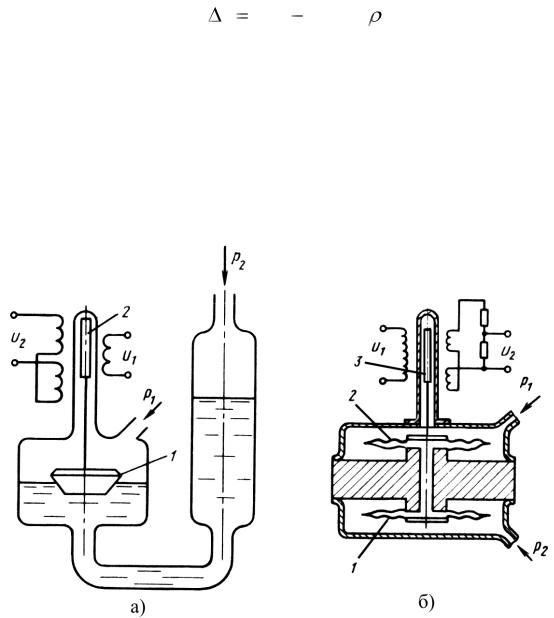
Если температура изменяется незначительно, то для определения концентрации раствора путем измерения его плотности может быть использована установка, схема которой приведена на рисунке 8.4, а. Анализируемая жидкость наливается в бак 1 до постоянного уровня. Постоянство уровня обеспечивается сливом излишка жидкости.
Рисунок 8.4 – Установки для измерения концентрации
В баке на глубине h с помощью дифференциального манометра 2 измеряется избыточное гидростатическое давление. Разность давлений в жидкости р и атмосферного р0 пропорциональна плотности жидкости:

71
р р0 g h, |
(8.1), |
где g - ускорение свободного падения.
Недостаток установки заключается в том, что если в жидкости имеются твердые взвешенные частицы, то с течением времени они могут засорить трубку, соединяющую бак с манометром.
Большую надежность имеет схема, приведенная на рис. 8.4, б. В бак с жидкостью 1 на глубину h, которая поддерживается постоянной, опущена труба 2. Через нее в жидкость пропускается воздух. В трубе с помощью дифференциального манометра 3 измеряется давление р. Избыточное давление р - р0 и плотность жидкости связаны соотношением (8.1). Благодаря прокачиванию воздуха выходное отверстие трубы не забивается твердыми частицами. Расход воздуха должен быть небольшим, чтобы перепад давления от дифференциального манометра до выходного отверстия трубы был незначителен.
В обеих установках дифференциальный манометр может быть проградуирован в единицах плотности жидкости или концентрации растворенного вещества.
Концентрация электролитов может быть определена с помощью электрических преобразователей или электрохимических преобразователей другого типа.
8.4 Измерение давлений
Приборы для измерения давления — манометры — можно разбить на три группы. Первую группу составляют жидкостные манометры. Эти приборы имеют два сообщающихся сосуда, заполненных жидкостью. На поверхность жидкости в одном сосуде действует измеряемое давление. Это изменяет уровень жидкости в другом. Разность уровней h пропорциональна разности давлений p1 - р2, действующих в одном и другом сосуде:
h ( p1 p2 ) / g
где  — плотность жидкости; g — ускорение силы тяжести.
— плотность жидкости; g — ускорение силы тяжести.
Жидкостный манометр является дифференциальным манометром, измеряющим разность давлений.
Однако с его помощью можно произвести и другие измерения давления. Если во втором сосуде над жидкостью создан вакуум, то манометр измеряет абсолютное давление ра. Если второй сосуд соединен с атмосферой,
72
то прибор измеряет избыточное давление ри. Если измеряемое абсолютное давление ра меньше атмосферного рат, то разность уровней будет пропорциональна вакууму рв: h ( pа pат ) / g
В электрических жидкостных манометрах изменение уровня жидкости преобразуется в электрическую величину. На рис. 8.5, а показана схема дифференциально-трансформаторного поплавкого датчика разности давлений ДПЭМ-2. В этом датчике уровень жидкости с помощью поплавка постоянного погружения 1 преобразуется в перемещение плунжера дифференциально-трансформаторного преобразователя 2 с последующим преобразованием в ЭДС. Заполнителем могут быть вазелиновое или трансформаторное масло, вода, ртуть.
Рисунок 8.5 - Дифференциально-трансформаторные датчики Ко второй группе относятся пружинные манометры. В этих
манометрах измеряемое давление подается в манометрическую пружину и деформирует ее на величину (перемещение), пропорциональную давлению. В качестве манометрической пружины используются сильфон, мембрана или трубчатая пружина (трубка Бурдона). Деформация пружины с помощью преобразователя перемещения преобразуется в электрическую величину. На рис. 8.5, б показана схема дифференциально-трансформаторного датчика разности давления типа ДМ. Давления р1 и р2 подаются в камеры, содержащие мембранные коробки 1, 2. Полости коробок сообщаются и заполнены дистиллированной водой. Измеряемая разность давлений

73
деформирует коробки и перемещает плунжер дифференциальнотрансформаторного преобразователя 3. Перемещение плунжера, следовательно, и выходная ЭДС пропорциональны разности давлений. Диапазоны измерения таких дифференциальных манометров лежат в пределах от 1,6 до 630 кПа. Основная погрешность в комплекте с вторичным прибором не превышает ± 2 %.
Работа манометров третьей группы основана на изменении свойств газа (плотности, теплопроводности, ионизационного тока и т.д.) под действием давления. Изменение свойств газа преобразуется в изменение электрической величины. Манометры этой группы в основном служат для измерения абсолютного давления и с успехом применяются для измерения вакуума.
Градуировка и поверка манометров производятся с помощью грузопоршневого манометра (рис. 8. 6). Он представляет собой гидравлическую систему, давление в которой создается поршнем l, вставленным в цилиндр грузовой колонки 2. Поршень нагружается дисковыми гирями 3. Давление р = G/Q, где G - вес поршня с гирями, Q - площадь сечения поршня. В гидравлическую систему включается проверяемый манометр 4 .
Рисунок 8.6 – Грузопоршневой манометр
74
Грузопоршневой манометр заполняется трансформаторным маслом через воронку 5. Для регулирования высоты поршня с гирями имеется вспомогательный поршень 6, который вытесняет масло из своего цилиндра в цилиндр грузовой колонки. Для увеличения точности создания давления поршень 1 с гирями 3 приводится во вращение. При вращении значительно уменьшается трение. Образцовые грузопоршневые манометры имеют класс точности 0,05.

75
9ДАТЧИКИ СИСТЕМЫ ГСП
Врамках Государственной системы приборов (ГСП) для измерения теплоэнергетических величин (температуры, давления, расхода жидкости или газа, уровня жидкости и др.) разработан комплект датчиков, состоящих из двух модулей. Один из них преобразует измеряемую физическую величину в силу или перемещение, другой – эту промежуточную величину в унифицированный электрический сигнал постоянного тока.
Модуль, преобразующий измеряемую величину, может быть агрегатно соединен с модулем, преобразующим силу или перемещение в унифицированный электрический сигнал. Первичный и вторичный модули образуют датчик.
Для преобразования промежуточной величины в унифицированный электрический сигнал наибольшее применение нашли электросиловой (с силовой компенсацией), дифференциально-трансформаторный и магнитомодуляционный датчики.
9.1 Датчики ГСП с электросиловым преобразователем (с силовой компенсацией)
Схема датчика приведена на рис. 9. 1. Сила F, развиваемая первичным преобразователем (модулем), через рычажную систему, состоящую из рычагов 1, 2, передается на рычаг 3. На этом рычаге смонтирован сердечник 4 дифференциально-трансформаторного преобразователя 5 и катушка 6 магнитоэлектрического обратного преобразователя 7. Рычажная система преобразует силу F в силу F1 = kF, приведенную в катушке 6. Коэффициент k равен передаточному отношению рычажного механизма. Сила Рг вызывает перемещение якоря дифференциально-трансформаторного преобразователя х. При этом на его выходе появляется напряжение U = k1 x. Напряжение усиливается усилителем 8 и преобразуется в ток I=k1k2x=S1x, где S1 - чувствительность прямого преобразователя, k2 коэффициент усиления усилителя. Ток проходит через сопротивление Нагрузки RH и обмотку преобразователя обратной связи 6. Под действием тока обратный преобразователь развивает силу, пропорциональную току I и стремящуюся уменьшить перемещение х:
Fос S2 I S1 S2 x w x ; |
(9.1) |

76
где S2 – чувствительность обратного преобразователя.
Рисунок 9.1 - Датчик ГСП с электросиловым преобразователем Обратный преобразователь развивает силу, аналогичную силе
упругости обычной пружины, коэффициент W характеризует ее жесткость.
|
Сила F1 перемещает сердечник до тех пор, пока она не уравновесится |
||||
силой |
обратного преобразователя Foc. Выходной ток преобразователя |
||||
I |
Fос |
|
|
F1 |
при равновесии пропорционален силе F1. |
|
|
|
|||
|
S2 |
|
|
S2 |
|
Когда требуется линейная функция преобразования сложного преобразователя силы в унифицированный электрический сигнал, в качестве преобразователя применяется магнитоэлектрический преобразователь. Известно, что он является наиболее точным электромеханическим обратным преобразователем с линейной функцией преобразования.
В некоторых случаях, например для построения расходомеров с сужающими устройствами, требуется функция преобразования I k 
 F1 . В этом случае в качестве обратного применяется электромагнитный
F1 . В этом случае в качестве обратного применяется электромагнитный

77
преобразователь. При фиксированном перемещении якоря его функция
преобразования имеет вид F |
k |
oc |
I 2 . |
||||||
|
|
|
|
oc |
|
|
|
|
|
Поскольку при равновесии подвижной части F1 Foc , то |
|||||||||
|
|
|
|
|
|
||||
I |
koc F1 k F1 , где k |
|
|
koc . |
|||||
Чувствительность преобразователя силы (см. рис. 9. 1) может в случае необходимости изменяться при настройке в некоторых пределах. Это изменение производится путем изменения передаточного отношения рычажного механизма посредством перемещения подвижной опоры 9 вдоль Г-образного рычага 2. Предел изменения входной силы F можно изменять от 5 до 50Н. Для коррекции нулевого положения подвижной системы и для балансировки веса деталей и узлов, присоединенных к преобразователю, имеется регулировочная пружина 10.
Диапазон изменения выходного тока составляет 0-5 или 0-20 мА. Основная приведенная погрешность не превышает ±0,4 или ±0,6 %. Погрешность не выходит за пределы основной, если сопротивление линии связи между преобразователем и нагрузкой не превышает 1 кОм. Включив в качестве сопротивления нагрузки резистор с номинальным значением 2 кОм или 500 Ом, можно получить унифицированное значение выходного сигнала с предельным значением 10 В.
На основе электросилового датчика, агрегатно подсоединяя к нему различные первичные модули, образуют датчики большого числа различных физических величин. Наиболее широкий ряд образован различными датчиками давления или разрежения: датчиками абсолютного (барометрического) и избыточного давления, разности давлений. Датчики разности давлений могут использоваться для измерения напора жидкости или газа в трубах или тяги в дымоходах. В этом случае они называются
датчиками напоромеров или тягомеров.
Перечисленные датчики имеют линейную функцию преобразования. Датчики разности давления могут использоваться в расходомерах с сужающим устройством. В этом случае датчик разности давлений называется датчиком расходомера. Он имеет функцию преобразования
I k 
 p1 p2 ,
p1 p2 ,
где k — коэффициент пропорциональности; р1 и р2 — давление до и после сужающего устройства.
Первичными измерительными преобразователями в перечисленной группе датчиков служат сильфоны или упругие манометрические трубки.

78
Когда в них подается давление, они деформируются и развивают силу, воздействующую на рычаг 1. Эта сила компенсируется силой, развиваемой электросиловым преобразователем. Диапазоны измерения датчиков давления лежат в пределах от 400 Па до 106 кПа, классы точности 0,6 и 1,0.
На основе электросилового преобразователя разработан ряд буйковых уровнемеров. Принципиальная схема уровнемера типа УБ-Э приведена на рис. 9.2, где применены те же цифровые обозначения, что и на рис. 9.1. Буек 11 представляет собой цилиндр, погруженный в резервуар, уровень жидкости в котором нужно измерить. Эффективный вес буйка зависит от уровня его погружения, поскольку на него действует выталкивающая сила жидкости. Эффективный вес буйка с помощью рычажной системы приводится к Т- образному рычагу 1 электросилового преобразователя и уравновешивается им. Начальный вес подвижной системы уровнемера уравновешивается противовесом 12. Коррекция нуля прибора осуществляется изменением натяга пружины 10.
Рисунок 9.2 - Принципиальная схема буйкового уровнемера типа УБ-Э
79
Диаметр буйка может изменяться от 140 до 6 мм, длина от 0,04 до 16 м. В уровнемерах этого типа верхний предел измерения уровня жидкости может изменяться от 0,02 до 16 м. Класс точности прибора с диапазоном измерения до 1 м составляет 1,0 или 1,5. При большем пределе измерения он составляет 1,5.
Датчики с электросиловыми преобразователями используются и для измерения температуры (подобно манометрическим термометрам). В зоне, где необходимо измерить температуру, помещается баллон с определенным газом или жидкостью. Баллон с помощью капилляра соединяется с манометрическим элементом датчика давления. При изменении температуры изменяется давление в баллоне, капилляре и в манометрическом элементе. Изменение давления вызывает изменение выходного тока электросилового преобразователя. Диапазон измерения таких манометрических приборов лежит в пределах от 0-25 до 0-300 °С. Имеются приборы с диапазоном от -50 до +150°С. Класс точности термометра может быть 1,0; 1,5; 2,5. Длина капилляра не превышает 2,5 м.
9.2 Дифференциально-трансформаторные датчики
В датчиках рассматриваемого типа модуль, образующий унифицированный электрический сигнал, состоит из дифференциальнотрансформаторного преобразователя и электронного блока. Структурная схема модуля приведена на рис. 9.3. Входной величиной модуля является перемещение ферромагнитного якоря.
Дифференциально-трансформаторный преобразователь 1 питается напряжением прямоугольной формы от электронного генератора 2. При достаточно большой индуктивности обмоток преобразователя 1 и достаточно большой частоте питающего напряжения токи в обмотках изменяются линейно, а выходное напряжение дифференциально-трансформаторного датчика имеет форму, близкую к прямоугольной.