

Управление клапаном (klp)
Данный блок предназначен для управления устройством типа "регулирующий клапан". Предполагается, что от устройства поступают цифровые сигналы концевых выключателей открытия и закрытия (значения 1 или 0) и аналоговый сигнал в диапазоне 0-100, показывающий реальное положение клапана (0 – полностью открыт, 100 – полностью закрыт).
В ход
CMD
задает
направление движения клапана: положительная
величина – открытие, отрицательная –
закрытие. При выполнении этих команд
на выходе OPN
формируется
сигнал открытия (значение 1), на выходе
CLS
–
сигнал закрытия (значение 1). В режиме
отслеживания неотрицательное значение
входа CMD
(0-100)
задает положение, которое должен занять
клапан.
ход
CMD
задает
направление движения клапана: положительная
величина – открытие, отрицательная –
закрытие. При выполнении этих команд
на выходе OPN
формируется
сигнал открытия (значение 1), на выходе
CLS
–
сигнал закрытия (значение 1). В режиме
отслеживания неотрицательное значение
входа CMD
(0-100)
задает положение, которое должен занять
клапан.
По следующим значениям входа CMD блок определяет состояние клапана:
128 – OFF (выключено);
129 – RESERVE (резерв);
130 – REPAIR (ремонт).
При переходе в состояние REPAIR, RESERVE или OFF управляющий сигнал на выходе OPN (CLS) блока сбрасывается.
Вход PT используется для задания времени открытия/закрытия клапана (в секундах).
На вход CDI подается реальное положение клапана (аналоговый сигнал в диапазоне 0-100, соответствующий проценту закрытия). Сигналы концевых выключателей имеют более высокий приоритет по сравнению с данными о положении клапана, т.е. если при открытии/закрытии включился концевой выключатель открытия/закрытия, блок KLP считает клапан полностью открытым/закрытым и Q%L=0 (100) на следующем такте пересчета.
Установленные в 1 биты входа CSC соответствуют следующим режимам работы блока:
0 бит – блокирование контроля концевого выключателя открытия;
1 бит – блокирование контроля концевого выключателя закрытия;
2 бит – блокирование контроля положения клапана;
7 бит – перевод в режим дистанционного управления. В этом режиме состояние клапана отслеживается по концевым выключателям, аварийные ситуации не контролируются;
12 бит – если бит 12 равен 1, клапан переходит в положение, заданное неотрицательным значением CMD (режим отслеживания). Скорость перехода определяется PT.

Настройки параметров задвижек и клапанов (SdV)
По значениям выходов блока SdV устанавливаются критерии аварийных ситуаций для блоков KLP и ZDV:
QDH – по значению этого выхода устанавливается максимально допустимое отклонение вычисленного положения клапана от реального: при |CDI-Q%L|>=100*QDH/PT формируется ошибка 9 и процедура открытия/закрытия клапана прерывается.
QDH=IDH, если 0<=IDH<=100; QDH=0, если IDH>100 или IDH<0, а также если вход IDH не определен. При QDH=0 ошибка 9 формируется даже при CDI=Q%L;
QDO – если при закрытии задвижки или клапана из положения "открыто" по истечении QDO*PT секунд не отключился концевой выключатель открытия, формируется ошибка 3, и процедура закрытия прерывается. QDO=IDO, если 0.1<=IDO<=0.5; QDO=0.1, если IDO<0.1 или IDO>0.5, а также если вход IDO не определен;
QDC – если при открытии задвижки или клапана из положения "закрыто" по истечении (1-IDС)*PT секунд не отключились концевые выключатели закрытия и муфты, формируется ошибка 2, и процедура открытия прерывается. QDC=IDC, если 0.5<=IDC<=0.9; QDC=0.9, если IDC<0.5 или IDC>0.9, а также если вход IDC не определен.
После отработки блока SdV для всех блоков KLP и ZDV на текущем узле будут использоваться установленные им настройки. Они будут изменены после отработки следующего блока SdV или следующего пересчета этого блока с измененными значениями его входов.

Звено второго порядка (SMTH2)
Данный блок с соединенными выходом Q и входом IQ выполняет сглаживание входного сигнала (INP) звеном второго порядка. Постоянная времени сглаживания определяется входом PT. Значение этого входа задает количество тактов, за которое выходное значение сравняется с входным при условии неизменности последнего после первого изменения.
Алгоритм сглаживания выглядит следующим образом (i обозначает текущий такт пересчета).
IF INPi<>INPi-1 THEN N:=1
IF N<PT THEN Qi:=IQi+N*(INPi-IQi)/PT; N:=N+1
ELSE Qi:=INPi
На рисунке показан результат работы блока. Кривая 1 соответствует входному сигналу (INP), кривая 2 – сглаженному (Q).
З вено
ШИМ (PWM)
вено
ШИМ (PWM)
Широтно-импульсная модуляция (ШИМ) - вид импульсной модуляции, при которой под действием модулирующего сигнала изменяется длительность (ширина) импульсов при постоянной частоте их следования.
При подаче на вход INP модулирующего сигнала на выходе блока формируется широтно-модулированный импульсный сигнал единичной амплитуды с частотой следования импульсов 1/2t, где t – период пересчета блока.
Длина импульса округляется до величины, кратной периоду пересчета блока. Для компенсации возникающей в связи с этим ошибки разности между округленной и истинной длиной импульсов суммируются. Когда абсолютное значение этой суммы превышает длительность одного такта, один такт добавляется или вычитается из длины очередного импульса. Подача на вход CLR отличной от нуля величины сбрасывает накопленную ошибку.
Значение модулирующего сигнала (INP) не должно выходить за границы диапазона [-100, 100], максимальная частота должна быть много меньше частоты пересчета блока. Глубина модуляции определяется амплитудой входного сигнала (при амплитуде 100 глубина модуляции составляет 100%, т.е. ширина импульсов равна 2t).
При положительном значении входной величины импульсы формируются на выходе QH (при этом QL=0), при отрицательном – на выходе QL (при этом QH=0).
Циклический импульс (IMP)
На выходе этого блока формируется последовательность импульсов с единичной амплитудой, длительностью PT1 тактов пересчета и периодом следования (PT1 + PT0) тактов.

З адержка
реакции (DEL)
адержка
реакции (DEL)
Данный блок воспроизводит на выходе значение входа INP. Однако при равенстве входа нулю значение выхода перестает меняться на время задержки, задаваемой значением входа PT (в тактах пересчета). Результат работы блока при подаче синусоидального сигнала на вход INP демонстрирует следующий рисунок (PT = 4):
Управление устройством типа ’двигатель’ (MOTOR)
Д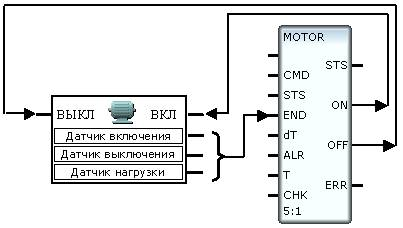 анный
блок предназначен для управления
устройством типа "двигатель",
снабженного командными входами включения
и выключения. Двигатель также может
вырабатывать следующие сигналы
диагностики – "включен", "выключен"
и "наличие/отсутствие нагрузки".
По этим сигналам блок MOTOR
может
анализировать состояние устройства.
Для управления двигателем по таймеру
используется блок nWRK.
Для управления группой двигателей (от
1 до 4) используется блок SBRK.
анный
блок предназначен для управления
устройством типа "двигатель",
снабженного командными входами включения
и выключения. Двигатель также может
вырабатывать следующие сигналы
диагностики – "включен", "выключен"
и "наличие/отсутствие нагрузки".
По этим сигналам блок MOTOR
может
анализировать состояние устройства.
Для управления двигателем по таймеру
используется блок nWRK.
Для управления группой двигателей (от
1 до 4) используется блок SBRK.
Управление группой устройств типа ’двигатель’ (SBRK)
Данный блок совместно с блоками MOTOR управляет группой устройств типа "двигатель" (от 1 до 4).


Ввод/вывод. Переходы
Чтение из порта (INP)
Этот блок считывает один байт данных из порта ввода/вывода, адрес которого задается входом ADDR. Считанное значение присваивается выходу Q.
Чтение слова из порта (INPW)
Этот блок считывает слово данных из порта ввода/вывода, адрес которого задается входом ADDR. Считанное значение присваивается выходу Q.


Запись в порт (OUTP)
Этот блок посылает в порт ввода/вывода один байт данных. На вход INP подается посылаемое значение, на вход ADDR – адрес порта.
Запись слова в порт (OUTPW)
Этот блок посылает в порт ввода/вывода слово данных. На вход INP подается посылаемое значение, на вход ADDR – адрес порта.



Выход из программы (EXIT)
Данный блок позволяет выйти из программы до пересчета всех ее функциональных блоков. Выход производится при наличии ненулевого значения на входе INP.
Пересылка значения (MOVE)
X(выход) = X(вход)
Пересылка четырех значений (MOVE4)
A(выход) = A(вход)
B(выход) = B(вход)
C(выход) = C(вход)
D(выход) = D(вход)
Регулирование
З вено
PID (PID)
вено
PID (PID)
Этот блок формирует выходное значение по ПИД-закону от величины, поданной на вход INP:
![]()
где i – текущий такт пересчета, KP, KD и KI – соответственно коэффициенты при пропорциональной, дифференциальной и интегральной составляющих, t– период пересчета блока в секундах (длительность такта).
Модуль подаваемого на вход KI отрицательного значения передается на выход. Далее при подаче на вход KI неотрицательного значения регулирование начинается с установленной величины.
Для ограничения величины управляющего воздействия используются входы блока MIN и MAX. Если величина управления меньше MIN, то Q = MIN, если величина управления больше MAX, то Q = MAX, при этом в обоих случаях накопление интегральной составляющей закона регулирования прекращается.
Данный блок вычисляет величину управляющего воздействия по значению рассогласования регулируемой величины и задания, которое предварительно надо вычислять с помощью блока X-Y.
Введение в алгоритм параметра t исключает необходимость пересчета настроек регулятора при смене периода пересчета.
Пример
Н а
рисунке показана программа, реализующая
контур регулирования по ПИД-закону.
а
рисунке показана программа, реализующая
контур регулирования по ПИД-закону.
Блок X-Y вычисляет рассогласование регулируемой величины (Y) с заданием (X). Величина рассогласования подается на вход INP блока DZONE, который реализует функцию зоны нечувствительности. Зона нечувствительности определяется значением входа DLT. С выхода блока DZONE сигнал подается на вход INP блока PID, вычисляющего величину управляющего воздействия. Для переключения контура на ручной режим используется блок SEL (вход IG). На вход IN0 блока SEL подается сигнал с выхода блока PID, а на вход IN1 - величина ручного управления выходом регулятора.
Звено PDD (PDD)
Этот блок формирует выходное значение по ПДД-закону от значения входа INP:
![]()
г де
i
–
текущий такт пересчета, KP
и
KD
–
соответственно коэффициенты при
пропорциональной и дифференциальной
составляющих, KDD
–
коэффициент при второй производной, t–
период пересчета блока в секундах
(длительность такта).
де
i
–
текущий такт пересчета, KP
и
KD
–
соответственно коэффициенты при
пропорциональной и дифференциальной
составляющих, KDD
–
коэффициент при второй производной, t–
период пересчета блока в секундах
(длительность такта).
Данный блок вычисляет величину управляющего воздействия по значению рассогласования регулируемой величины и задания, которое предварительно надо вычислять с помощью блока X-Y. Все дополнительные функции контура также программируются с помощью отдельных блоков.
Пример
Рассмотрим задачу регулирования по PID-закону при условии применения исполнительного механизма, управляемого широтно-импульсным сигналом. В этом случае, поскольку ШИМ-преобразование является интегрирующим, для реализации PID-закона надо использовать звено PDD.
На рисунке показана диаграмма, реализующая такой регулятор.
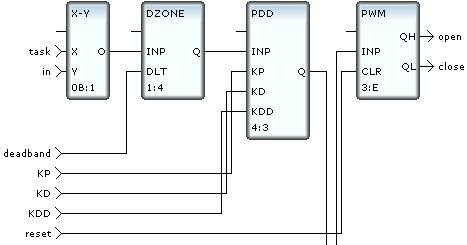
Блок X-Y вычисляет величину рассогласования регулируемой величины (Y) с заданием (X). Величина рассогласования подается на вход INP блока DZONE. Он реализует зону нечувствительности, величина которой задается входом DLT. С выхода блока DZONE сигнал подается на вход INP блока PDD, вычисляющего величину управляющего воздействия. Блок PWM реализует широтно-импульсное преобразование. На его вход INP подается величина управляющего воздействия с выхода блока PDD. На выходе QH блока PWM формируется широтно-импульсный сигнал "Открыть", а на QL – "Закрыть".