

Физика / Физика / Механика. Лекции / lekcii_meh / glava3
.pdfДвигаясь под действием сил, точки системы за интервал времени dt со-
вершают перемещения, соответственно равные dr1 , dr2 , …, drn . Умножим каж-
дое уравнений скалярно на соответствующие перемещения и, учитывая, что dri = vidt , получим:
|
R |
R |
|
|
R |
|
R |
|
|
|
|
|
|
m1(v1dv1 )− |
(F1′+ F1 )dr1 |
= f1dr1, |
|
|
|
||||||
|
R |
R |
R |
R |
R |
R |
R |
, |
|
|
||
|
|
|
|
|
|
|
||||||
|
m2 (v2dv2 )− (F2′ + F2 )dr2 = f2dr2 |
|
|
|||||||||
|
.................................................. |
|
|
|
||||||||
|
R |
|
R |
R |
R |
R |
R |
R |
|
|
||
|
|
|
|
|
|
|
|
|||||
|
mn (vndvn ) |
− (Fn′ + Fn )drn = fndrn. |
|
|
||||||||
Сложив эти уравнения, получим |
|
|
|
|
||||||||
|
n |
R |
R |
n |
R |
R |
R |
= |
n R |
R |
(11.1) |
|
|
∑mi (vidvi )− ∑(Fi′ + Fi )dri |
∑fidri . |
||||||||||
|
i=1 |
|
|
i=1 |
|
|
|
|
|
i=1 |
|
|
|
Первый член левой части равенства (11.1) |
|
||||||||||
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
n |
R |
R |
n |
m v2 |
|
|
|
|
|||
|
|
|
|
|
|
|
i i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
∑mi (vidvi )= ∑d |
2 |
= dT , |
|
|
|||||||
|
i=1 |
|
|
i=1 |
|
|
|
|
|
|
||
где |
dT – |
есть |
приращение |
кинетической энергии |
системы. Второй член |
|||||||
R |
R |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑(Fi′+ Fi )dri |
равен элементарной работе внутренних и внешних консервативных |
|||||||||||
сил, взятой со знаком минус, т.е. равен элементарному приращению потенциаль-
ной энергии dU системы.
Правая часть равенства (11.1) задает работу внешних неконсервативных
сил, действующих на систему. Таким образом, имеем
d(T + U)= dA . |
(11.2) |
При переходе системы из состояния 1 в какое-либо состояние 2
2
∫d(T + U) = A12 ,
1
т.е. изменение полной механической энергии системы при переходе из одного со-
стояния в другое равно работе, совершенной при этом внешними неконсерватив-
ными силами. Если эти силы отсутствуют, то из (11.2) следует, что
d(T + U) = 0 ,

откуда
T + U = E = const , |
(11.3) |
т.е. полная механическая энергия системы сохраняется постоянной. Выражение
(11.3) представляет собой закон сохранения механической энергии: в системе тел, между которыми действуют только консервативные силы, полная механиче-
ская энергия сохраняется, т.е. не изменяется со временем.
Механические системы, на тела которых действуют только консервативные силы (внутренние и внешние), называются консервативными системами.
Закон сохранения механической энергии: в консервативных системах полная механическая энергия сохраняется.
Закон сохранения механической энергии связан с однородностью времени,
т.е. инвариантностью физических законов относительно начала отсчета времени.
Диссипативные системы – системы, в которых механическая энергия по-
степенно уменьшается за счет преобразования в другие (немеханические) формы энергии.
Процесс постепенного уменьшения энергии называется диссипацией или
рассеянием энергии.
Закон сохранения и превращения энергии – фундаментальный закон при-
роды, он справедлив как для систем микроскопических тел, так и для систем мак-
рочастиц.
Закон сохранения энергии для диссипативных систем: энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в дру-
гой.
В этом и заключается физическая сущность закона сохранения и превраще-
ния энергии – сущность неуничтожимости материи и ее движения.

Задача 1. Потенциальная энергия частицы определяется выражением
U = b(x2 + y2 + z2 ) , где b = 4,0 кг/с2. Частица начинает двигаться из точки с коор-
динатами (1; 1; 1) (м). Найдите ее кинетическую энергию в момент, когда частица находится в точке с координатами (0,5; 0,5; 0,5) (м).
Решение. По закону сохранения механической энергии полная энергия частицы в указанных в задаче точках должна быть одинаковой
E = T1 + U1 = T2 + U2 = const ,
где T1 = 0 – кинетическая энергия частицы в начальной точке; U1 – ее потенци-
альная энергия в этой точке; T2 – кинетическая энергия в конечной точке; U2 –
потенциальная энергия в конечной точке. Из записанной формулы выразим кине-
тическую энергию в конечной точке
T2 = T1 + U1 - U2 = T1 + b(x12 + y12 + z12 ) - b(x22 + y22 + z22 ) .
Подставив, в найденное выражение, числовые значения получим
T2 = 4 ×(12 +12 +12 ) - 4 ×(0,52 + 0,52 + 0,52 ) = 9,0 Дж.
§ 12
Графическое представление энергии
Рассмотрим случай одномерного движения и представим потенциальную энергию в виде функции U = U(x) .
График зависимости потенциальной энергии от некоторого аргумента называется
потенциальной кривой.
Будем рассматривать только консервативные системы.
Рассмотрим графическое представление потенциальной энергии для тела в одномерном поле тяжести. По-
тенциальная энергия тела массой m, поднятого на высоту h над поверхностью Земли, тогда U(h) = mgh. Угол наклона графика U = U(h) (рис. 16) к оси h тем больше, чем больше масса тела tgα = mg.
Пусть полная энергия тела равна E . На высоте h тело обладает потенци-
альной энергией U , которая определяется отрезком вертикали заключенным ме-
жду точкой h на оси абсцисс и графиком U(h) . Естественно, что кинетическая энергия T задается ординатой между графиком U(h) и горизонтальной прямой
ЕЕ. Из рисунка следует, что если h = hmax , то T = 0 и U = mghmax , т.е. потенци-
альная энергия становится максимальна и равна полной энергии.
Из представленного графика можно найти скорость тела на высоте h :
T = E − U ,
т.е.
|
mv2 |
|
= mghmax − mgh , |
||
2 |
|
||||
|
|
|
|
||
откуда v = |
|
|
. |
||
|
2g(hmax −h) |
||||
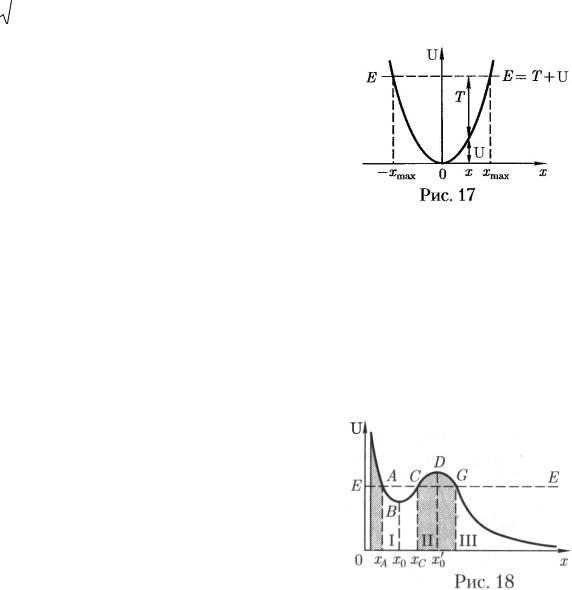
Теперь рассмотрим графическое представление потенциальной энергии для упругого деформирован-
ного тела. Зависимость потенциальной энергии упру-
гой деформации U = kx2  2 от деформации x имеет вид параболы (рис. 17). Из рисунка видно, что с
2 от деформации x имеет вид параболы (рис. 17). Из рисунка видно, что с
возрастанием деформации x потенциальная энергия тела возрастает, а кинетиче-
ская – уменьшается. Абсцисса xmax определяет максимально возможную дефор-
мацию растяжения тела, а − xmax – максимально возможную деформацию сжатия
тела. Если x = ±xmax , то T = 0 и U = E = kxmax2  2 , т.е. потенциальная энергия ста-
2 , т.е. потенциальная энергия ста-
новится максимальной и равной полной энергии. В случае, изображенном на ри-
сунке, можно сказать, что тело находится в потенциальной яме с координатами
− xmax ≤ x ≤ xmax .
Проанализируем потенциальную кривую изо-
браженную на рис. 18. Частица может находиться только там, где U(x) < E , то есть в областях I и III.
Переходить из области I в III и обратно частица не
может, так как ей препятствует потенциальный барьер CDG , ширина которого равна интервалу значений x , при которых E < U , а его высота определяется раз-
ностью UD − E . Для того чтобы частица смогла преодолеть потенциальный барь-
ер, ей необходимо сообщить дополнительную энергию, равную высоте барьера или превышающую ее. В области I частица с полной энергией Е оказывается «за-
пертой» в потенциальной яме АВС и совершает колебания между точками с коор-
динатами xA и xC .
В точке В с координатой x0 потенциальная энергия частицы минимальна.
Так как, на частицу действует сила F = − |
∂U , а условие минимума потенциаль- |
||
|
|
x |
∂x |
|
|
|
|
ной энергии |
∂U = 0 , то в точке В F = 0 . Указанное условие выполняется и для |
||
|
∂x |
x |
|
|
|
|
|
точки x′0 (для UD ).
Положением устойчивого равновесия называется положение частицы x0 ,
при смещении из которого она испытывает действие возвращающей силы.
Точка x0 является положением устойчивого равновесия.
Положением неустойчивого равновесия называется положение частицы x′0 , при смещении из которого на нее начинает действовать сила стремящаяся удалить ее от этого положения.
Точка x′0 является положением неустойчивого равновесия.
§ 13
Удар абсолютно упругих и неупругих тел
Удар (или соударение) – это столкновение двух или нескольких тел, при котором взаимодействие длится очень короткое время.
Отношение нормальных составляющих относительной скорости тел после и до удара называется коэффициентом восстановления ε:
ε = v′
n .
vn
Если для сталкивающихся тел ε = 0 , то такие тела называются абсолютно неуп-
ругими.
Если для сталкивающихся тел ε = 1, то такие тела называются абсолютно упру-
гими.
На практике обычно 0 < ε < 1.
Например: сталь – ε ≈ 0,56 ; слоновая кость – ε ≈ 0,89 ; свинец – ε ≈ 0 .
Прямая проходящая через точку соприкосновения тел и нормальная к поверхно-
сти их соприкосновения, называется линией удара.
Удар называется центральным, если тела до удара движутся вдоль прямой про-
ходящей через их центры масс.
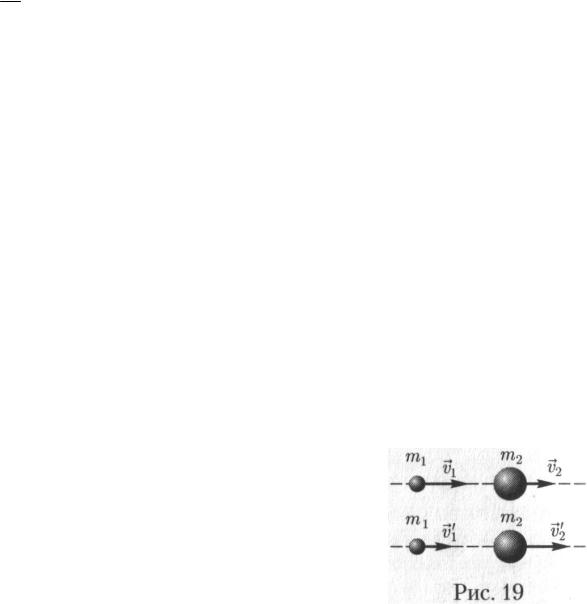
Абсолютно упругий удар – это столкновение двух тел, в результате которого в
обеих взаимодействующих телах не остается никаких деформаций и вся кинети-
ческая энергия, которой обладали тела до удара, после удара снова превращается в кинетическую энергию.
При абсолютно упругом ударе (рис. 19) законы
сохранения имеют вид:
R |
R |
R′ |
R′ |
, |
(13.1) |
m1v1 |
+ m2v2 |
= m1v1 |
+ m2v2 |
2 |
2 |
|
′2 |
|
′2 |
||
m1v1 |
+ |
m2v2 |
= |
m1v1 |
+ |
m2v2 |
. |
2 |
|
|
|
||||
2 |
2 |
2 |
|
||||
Произведя соответствующие преобразования в выражениях
получаем
|
′ |
′ |
− v2 ), |
|
m1(v1 − v1 ) = m2 (v2 |
||||
2 |
′2 |
|
′2 |
2 |
m1(v1 |
− v1 |
)= m2 (v2 |
− v2 ), |
|
откуда |
|
|
|
|
′ |
= v2 |
′ |
|
|
v1 + v1 |
+ v2 . |
|
|
|
Решая уравнения (13.3) и (13.5), находим
(13.2)
(13.1) и (13.2),
(13.3)
(13.4)
(13.5)
′ |
= |
(m1 |
− m2 )v1 |
+ 2m2v2 |
, |
(13.6) |
|||
v1 |
|
|
m1 + m2 |
||||||
|
|
|
|
|
|
||||
′ |
= |
|
(m2 |
− m1 )v2 |
+ 2m1v1 |
. |
(13.7) |
||
v2 |
|
|
m1 + m2 |
||||||
|
|
|
|
|
|
||||
Пример 1. v2 = 0 |
|
|
|||||||
′ |
= |
(m1 |
− m2 )v1 |
, |
|
(13.8) |
|||
v1 |
|
m1 + m2 |
|
||||||
|
|
|
|
|
|
||||
′ |
= |
2m1v1 |
|
. |
|
|
(13.9) |
||
v2 |
m + m |
2 |
|
|
|||||
|
|
1 |
|
|
|
|
|
||
Проанализируем выражения (13.8) и (13.9) для двух шаров различных масс:
|
′ |
= 0, |
′ |
|
|
|
|
|
|
|
а) m1 = m2 v1 |
v2 = v1 ; |
|
|
|
|
|||||
|
′ |
< v1, |
′ |
|
′ |
R′ |
|
R |
; |
|
б) m1 > m2 v1 |
v2 |
> v1 |
, v1 |
−− v1 |
||||||
|
R′ |
R |
|
′ |
|
′ |
|
|
|
|
в) m1 < m2 v1 |
−↓ v1, v2 |
< v1 ; |
|
|
|
|||||
|
R′ |
R |
′ |
|
2m1v1 |
|
|
|||
г) m2 >> m1 v1 = −v1; v2 |
≈ |
|
|
≈ 0 . |
||||||
m2 |
||||||||||
|
|
|
|
|
|
|
|
|||
Пример 2. При m1 = m2 |
выражения (13.6) и (13.7) будут иметь вид: |
|||||||||
′ |
′ |
|
|
|
|
|
|
|
|
|
v1 |
= v2 , v2 = v1 , |
|
|
|
|
|
|
|
|
|
т.е. шары равной массы «обмениваются» скоростями.
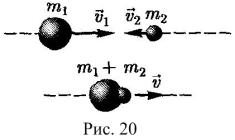
Абсолютно неупругий удар – это столкновение двух тел, в результате ко-
торого тела объединяются, двигаясь дальше как единое целое.
При абсолютно неупругом ударе (рис. 20) за-
кон сохранения импульса имеет вид
R |
R |
R |
m1v1 |
+ m2v2 |
= (m1 + m2 )v, |
откуда
|
R |
|
R |
|
|
|
|
R |
m v |
+ m v |
|
|
|
||
v = |
1 1 |
2 |
2 |
. |
|
(13.10) |
|
m1 + m2 |
|
|
|||||
|
|
|
|
|
|
||
|
|
|
|
|
R |
R |
|
|
|
|
|
R |
v |
+ v |
|
Если m = m |
, то v = |
1 |
2 |
. |
|||
|
|
||||||
|
1 |
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
Определим потери кинетической энергии в абсолютно неупругом ударе:

|
m v2 |
+ |
m v2 |
|
− |
(m + m )v2 |
. |
|||||||||||
T = |
1 1 |
|
|
|
2 2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
||
2 |
|
|
|
|
2 |
|
|
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Используя выражение (13.10), получим |
|
|||||||||||||||||
|
|
|
(m1m2 ) |
|
|
|
|
|
2 |
|
|
|
|
|
||||
DT = |
2(m + m |
2 |
) |
(v1 |
- v2 ) . |
|
|
|
|
|
||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если первоначально v2 = 0 , то |
|
|
||||||||||||||||
v = |
m1v1 |
, DT = |
|
|
m2 |
|
× |
m1v12 |
. |
|||||||||
m1 + m2 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
m1 + m2 2 |
|
||||||||||
Когда m2 >> m1 v << v1 |
и почти вся кинетическая энергия тела при ударе |
|||||||||||||||||
переходит в другие формы энергии. |
|
|
||||||||||||||||
При m1 >> m2 v ≈ v1 . |
|
|
|
|
|
|||||||||||||